Enhanced flatbed tow truck model for stable and safe platooning in - PowerPoint PPT Presentation
Enhanced flatbed tow truck model for stable and safe platooning in presences of lags, communication and sensing delays 1 ALAN ALI GATAN GAR CIA P H ILIP P E M AR TIN ET INDEX 2 I. Introduction II. Modeling: Vehicle,
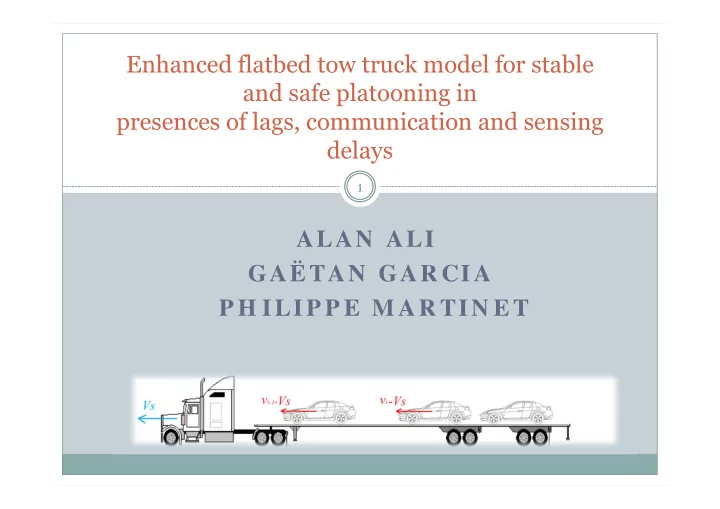
Enhanced flatbed tow truck model for stable and safe platooning in presences of lags, communication and sensing delays 1 ALAN ALI GAËTAN GAR CIA P H ILIP P E M AR TIN ET
INDEX 2 I. Introduction II. Modeling: Vehicle, Platoon III. Control IV. Stability Without communication delay With all delays V. Safety VI. Simulation VII. Conclusion
I. INTRODUCTION 3 Why platooning: Increases traffic density. Increases safety: Weak collision (Small relative velocity). No human factor. Small reaction time. decreases fuel consumption. decreases driver tiredness
I. INTRODUCTION 4 Global Control and Local Control : Data (at least from leader, adjacent vehicles) Sophisticated sensors (needed, Not needed). Adaptation in the environment (Maybe, Not needed) Communication system ( need very reliable , not needed ) Trajectory tracking and inter distance keeping (accurate , Not very accurate) The ca r is tota lly a utonom ous (No, Yes).
I. INTRODUCTION 5 Variable inter-vehicle distances : Distances are proportional to velocity in Constant Time Headway(CTH) Low traffic density. Stable without communication. The cars can work autonomously. X L hv i Constants inter-vehicle distances: High traffic density. The communication between vehicles is mandatory. X L
I. INTRODUCTION 6 Delays and lags: Lags and times delays make the net engine torque is not immediately equal to the desired torque computed by the controller. Delays types and sources: Actuator lags: The lag in the engine response, The lag of the throttle actuator, The lag of the brake actuator… Sensing delays: The delay due to the sensors response time, The delay due to the sensors filter… Com m unication delays: Communication transfer time, Packet drops, Connection loss…
I. INTRODUCTION 7 State of the art: Stability with lags and sensing delays: Study can be found for many control laws [ 2010:Ling-yun, 2001:Rajamani, Swaroop, Yanakiev ]. A detailed study when using classical time headway for homogeneous and heterogeneous platoons is found in [ Lingyun(2011) ]. Effects of communication delays: The platoon is unstable for any propagation delays in the communicated leader information [ 2001: Hedrick ] !!!!!. A solution in [ 2001: Xiangheng ] by synchronizing all the controllers of the vehicles, But Clock jitter, which can be seen as a delay and may cause instability according to [2001: Hedrick] result, was briefly mentioned!!!!!. [ Lingyun(2011) ] proved string stability for the leader-predecessor and predecessor- successor framework neglecting information delays between vehicles. The effect of losing the communication is presented in [2010: Teo]. It has been proved that string stability can be retained, with limited spacing error, by estimating lead vehicle’s state during losses. In this Work we prove the stability and the safety of the platoon in presence of all the delays in extension to [ 2001: Hedrick ],
II. MODELING ( Longitudinal Model ) 8 Aero dynamical Newton’s law, force Gravitationnel Rolling force resistance Applying the exact linearization system, x W x x W x 1 1 s s
II. Modeling (Platoon) 9 Platoon: Vehicles following each other. The leader: Driven Manually or automatically/ it can be virtual or real. The other vehicles: Run at the same speed keeping desired inter-vehicle distances. � : Desired inter distance. : Position of vehicle i. x i : speed of vehicle i. v i : Spacing error between vehicle i and e x x L 1 i i i vehicle i-1.
III. CONTROL 10 Control Objectives. Keep a desired distance between the vehicles, Make the vehicles move at the same speed, Ensure vehicles and platoon stability [1-5], Control on highways [1,3] and in urban areas [2,4], Ensure vehicles and platoon safety [ ICARCV14 ], Increase traffic density, Ensure the stability and safety even in case of : Entire communication loss between vehicles [ ICARCV14 ], Existence of actuating, sensing lags and com m unication delays.
III. CONTROL 11 Control law: New ( ) ( ) ( ( ) ( )) e t e t h v t V t e i i 1 V term W i i h e : Is the error between the position of the virtual truck and the vehicle i. V i The position of the truck is calculated by integrating V.
II. CONTROL (With delays) 12 Modeling of the platoon with delays: Lags τ � : so �� � � �� � τ � � � � � � � Sensing delays ∆ � : � � � , �� � � , � � � � � � ∆ � , �� � � � ∆ � , � � � ∆ � Communication delays τ � � : so � � , � � � � � �∆ � � τ �� � , � � � � �∆ � � τ �� � � �� �� � � �∆ � � � �∆ � � � �∆ � �
III. CONTROL(With delays) 13 The error function of the i-th vehicle becomes: c e ( s ) G ( s ) e ( s ) G ( s ) e V ( s ) i i e i 1 V Transfer functions G ( s ), G ( s ) e V Impulse functions g ( t ), g ( t ) e V
IV. STABILITY 14 Platoon stability: All state variables are always limited for all the vehicles: , , : i i i e ( t ) & e ( t ) & e ( t ) i i i i i i 1 ,..., 0 i N and t
IV. STABILITY 15 Stability with communication delay: out e ( s ) G ( s ) e ( s ) G ( s ) e c V ( s ) i e i 1 V Sufficient stability condition (error do not increase through platoon) e ( t ) e 1 t ( ) i i It is sufficient to prove: e ( s ) i G ( s ) 1 i e ( s ) i 1 We get stability conditions: h 2 ( ) 2 h 1 1 1 1 & & & h 2 ( ) 2 ( h ( ) ) 2 h
IV. STABILITY 16 Stability with communication delay: c e ( s ) G ( s ) e ( s ) G ( s ) e V ( s ) i i e i 1 V We can’t use e ( t ) e 1 t ( ) i i We calculate � as a function of � and : s i 2 1 ( G e ) c i 1 s e e ( s ) G ( s ) e ( s ) G ( s ) e V ( s ) c i e 1 V s 1 G e c e Sufficient stability condition is to prove that the errors is always limited for all the vehicles and all the times: : e ( t ) i 1 ,..., N and t 0 i i i
IV. STABILITY 17 Stability with communication delay: If � � � , � � ��� are positive impulse functions then we get: ( ) ( ) ( ) e s F v s F V s j i 2 0 1 ( G ( ) e ) 2 c 1 e 0 V e The only problem can appears near low G ( ) G ( 0 ) 1 frequencies when (X V -x 0 ) become very big e e h ( V v ) ( X x ) i 1 V 0 j i 2 1 ( G ( ) e ) c 1 i e e ( t ) G ( ) e ( t ) G ( ) V ( t ) i e 1 V j 1 G ( ) e c e Bounded if the Converge to zero propagation delay j 0 1 G ( ) e 2 c e ∆ � is bounded G ( ) G ( 0 ) 1 G e e ( ) G ( 0 ) 1 1 G ( ) G ( 0 ) e e V V c 1
V.SAFETY 18 We want to limit the maximum error to keep the inter-vehicle distances always bigger than zero : ( ) ( ) ( ) ( ) ( ) 2 ,..., e t G e t G V t i N i e i 1 V Taking max( will limit the max error, we get: ) L L G ( ) ( 1 G ( ) ) i 2 ,..., N V e V ( t ) L i 2 ,..., N c c c i i 1 max( V ( t )) Limit for communication propagation delay that prevents collisions
V.SAFETY 19 For the first error � : e ( t ) K ( s ) e ( s ) K ( s ) a ( s ) 1 e V V V Taking � we get: e ( t ) K ( s ) a ( s ) 1 V 0 e ( t ) K ( s ) a ( s ) 1 V 0 a 1 0 h L
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.