Dynamics of gases of particles with singular repulsion Djalil CHAFA - PowerPoint PPT Presentation
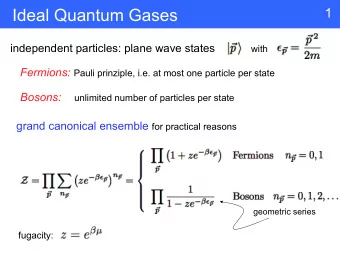
Dynamics of gases of particles Dynamics of gases of particles with singular repulsion Djalil CHAFA Paris-Dauphine / PSL Random Matrices and Related Topics KIAS, Seoul, Korea May 6-10, 2019 1/28 Dynamics of gases of particles Introduction
Dynamics of gases of particles Coulomb gases Coulomb energy and equilibrium measure � Coulomb energy of probability measure µ on R d : �� E ( µ ) = g ( x − y ) µ ( d x ) µ ( d y ) ∈ R ∪{ + ∞ } . � Coulomb energy with confining potential (external field) � E V ( µ ) = E ( µ )+ V ( x ) µ ( d x ) . � Equilibrium probability measure (electrostatics) µ ∗ = arginf E V � If V is stronger than g at infinity then µ ∗ is compactly supported � If V is smooth then µ ∗ has density ∆ V 2 c d 8/28
Dynamics of gases of particles Coulomb gases Examples of equilibrium measures Interaction g Confinement V Equilibrium µ ∗ d 1 2 arcsine ∞ 1 interval c ( x ) x 2 1 2 semicircle (Dyson) | x | 2 2 2 uniform on a disc (Ginibre) � x � 2 ≥ 3 uniform on a ball d ≥ 2 radial radial in a ring d 9/28
Dynamics of gases of particles Coulomb gases Coulomb gas or one component plasma � Energy of n Coulomb charges 1 n at positions x 1 ,..., x n in R d : H ( x 1 ,..., x n ) = 1 n V ( x i )+ 1 ∑ n 2 ∑ g ( x i − x j ) n i = 1 i � = j 10/28
Dynamics of gases of particles Coulomb gases Coulomb gas or one component plasma � Energy of n Coulomb charges 1 n at positions x 1 ,..., x n in R d : � �� H ( x 1 ,..., x n ) = V ( x ) µ n ( d x )+ g ( x − y ) µ n ( d x ) µ n ( d y ) x � = y � Empirical measure: µ n = 1 n ∑ n i = 1 δ x i 10/28
Dynamics of gases of particles Coulomb gases Coulomb gas or one component plasma � Energy of n Coulomb charges 1 n at positions x 1 ,..., x n in R d : � �� H ( x 1 ,..., x n ) = V ( x ) µ n ( d x )+ g ( x − y ) µ n ( d x ) µ n ( d y ) x � = y � �� � E � = V ( µ n ) � Empirical measure: µ n = 1 n ∑ n i = 1 δ x i 10/28
Dynamics of gases of particles Coulomb gases Coulomb gas or one component plasma � Energy of n Coulomb charges 1 n at positions x 1 ,..., x n in R d : � �� H ( x 1 ,..., x n ) = V ( x ) µ n ( d x )+ g ( x − y ) µ n ( d x ) µ n ( d y ) x � = y � �� � E � = V ( µ n ) � Empirical measure: µ n = 1 n ∑ n i = 1 δ x i � Gibbs measure on ( R d ) n : � � − β n 2 exp 2 H ( x 1 ,..., x n ) P ( d x ) = d x . Z 10/28
Dynamics of gases of particles Coulomb gases Coulomb gas or one component plasma � Energy of n Coulomb charges 1 n at positions x 1 ,..., x n in R d : � �� H ( x 1 ,..., x n ) = V ( x ) µ n ( d x )+ g ( x − y ) µ n ( d x ) µ n ( d y ) x � = y � �� � E � = V ( µ n ) � Empirical measure: µ n = 1 n ∑ n i = 1 δ x i � Gibbs measure on ( R d ) n : � � − β 2 n 2 E � = exp V ( µ n ) P ( d x ) = d x . Z 10/28
Dynamics of gases of particles Coulomb gases Coulomb gas or one component plasma � Energy of n Coulomb charges 1 n at positions x 1 ,..., x n in R d : � �� H ( x 1 ,..., x n ) = V ( x ) µ n ( d x )+ g ( x − y ) µ n ( d x ) µ n ( d y ) x � = y � �� � E � = V ( µ n ) � Empirical measure: µ n = 1 n ∑ n i = 1 δ x i � Gibbs measure on ( R d ) n : � � − β n E � = exp V ( µ n ) β n = β 2 n 2 . P ( d x ) = d x , Z 10/28
Dynamics of gases of particles Coulomb gases Coulomb gas or one component plasma � Energy of n Coulomb charges 1 n at positions x 1 ,..., x n in R d : � �� H ( x 1 ,..., x n ) = V ( x ) µ n ( d x )+ g ( x − y ) µ n ( d x ) µ n ( d y ) x � = y � �� � E � = V ( µ n ) � Empirical measure: µ n = 1 n ∑ n i = 1 δ x i � Gibbs measure on ( R d ) n : � � − β n E � = exp V ( µ n ) β n = β 2 n 2 . P ( d x ) = d x , Z � ∝ e − β n ( � V , µ n � + � ∆ − 1 µ n , µ n � ) � CLT with Gaussian Free Field 10/28
Dynamics of gases of particles Coulomb gases Empirical measure and equilibrium measure � Random empirical measure under P : n µ n = 1 ∑ δ x i . n i = 1 11/28
Dynamics of gases of particles Coulomb gases Empirical measure and equilibrium measure � Random empirical measure under P : n µ n = 1 ∑ δ x i . n i = 1 2 n 2 ≫ n then with probability one � If V is smooth and if β n = β µ n − n → ∞ µ ∗ . → 11/28
Dynamics of gases of particles Coulomb gases Empirical measure and equilibrium measure � Random empirical measure under P : n µ n = 1 ∑ δ x i . n i = 1 2 n 2 ≫ n then with probability one � If V is smooth and if β n = β µ n − n → ∞ µ ∗ . → � Laplace method � Large Deviation Principle (Gozlan-C.-Zitt) � � log P dist ( µ n , µ ∗ ) ≥ r n → ∞ − β � � − → inf E V ( µ ) − E V ( µ ∗ ) . n 2 2 dist ( µ , µ ∗ ) ≥ r 11/28
Dynamics of gases of particles Coulomb gases Empirical measure and equilibrium measure � Random empirical measure under P : n µ n = 1 ∑ δ x i . n i = 1 2 n 2 ≫ n then with probability one � If V is smooth and if β n = β µ n − n → ∞ µ ∗ . → � Laplace method � Large Deviation Principle (Gozlan-C.-Zitt) � � log P dist ( µ n , µ ∗ ) ≥ r n → ∞ − β � � − → inf E V ( µ ) − E V ( µ ∗ ) . n 2 2 dist ( µ , µ ∗ ) ≥ r � Quantitative estimates? How to relate dist and E V ( · ) − E V ( µ ∗ ) ? 11/28
Dynamics of gases of particles Concentration of measure Outline Introduction Coulomb gases Concentration of measure Dynamics for planar case 12/28
Dynamics of gases of particles Concentration of measure Probability metrics and topologies � Coulomb divergence (Large Deviations rate function) E V ( µ ) − E V ( µ ∗ ) 13/28
Dynamics of gases of particles Concentration of measure Probability metrics and topologies � Coulomb divergence (Large Deviations rate function) E V ( µ ) − E V ( µ ∗ ) � Coulomb metric � E ( µ − ν ) 13/28
Dynamics of gases of particles Concentration of measure Probability metrics and topologies � Coulomb divergence (Large Deviations rate function) E V ( µ ) − E V ( µ ∗ ) � Coulomb metric � E ( µ − ν ) � Bounded-Lipschitz or Fortet–Mourier distance � d BL ( µ , ν ) = sup f ( x )( µ − ν )( d x ) , � f � Lip ≤ 1 � f � ∞ ≤ 1 13/28
Dynamics of gases of particles Concentration of measure Probability metrics and topologies � Coulomb divergence (Large Deviations rate function) E V ( µ ) − E V ( µ ∗ ) � Coulomb metric � E ( µ − ν ) � Bounded-Lipschitz or Fortet–Mourier distance � d BL ( µ , ν ) = sup f ( x )( µ − ν )( d x ) , � f � Lip ≤ 1 � f � ∞ ≤ 1 � (Monge-Kantorovich-)Wasserstein distance E ( | X − Y | p ) 1 / p . W p ( µ , ν ) = inf ( X , Y ) X ∼ µ , Y ∼ ν 13/28
Dynamics of gases of particles Concentration of measure Probability metrics and topologies � Coulomb divergence (Large Deviations rate function) E V ( µ ) − E V ( µ ∗ ) � Coulomb metric � E ( µ − ν ) � Bounded-Lipschitz or Fortet–Mourier distance � d BL ( µ , ν ) = sup f ( x )( µ − ν )( d x ) , � f � Lip ≤ 1 � f � ∞ ≤ 1 � (Monge-Kantorovich-)Wasserstein distance �� � � 1 / p | x − y | p π ( d x , d y ) W p ( µ , ν ) = inf . π ∈ Π( µ , ν ) 13/28
Dynamics of gases of particles Concentration of measure Probability metrics and topologies � Coulomb divergence (Large Deviations rate function) E V ( µ ) − E V ( µ ∗ ) � Coulomb metric � E ( µ − ν ) � Bounded-Lipschitz or Fortet–Mourier distance � d BL ( µ , ν ) = sup f ( x )( µ − ν )( d x ) , � f � Lip ≤ 1 � f � ∞ ≤ 1 � Kantorovich-Rubinstein duality � W 1 ( µ , ν ) = sup f ( x )( µ − ν )( d x ) . � f � Lip ≤ 1 13/28
Dynamics of gases of particles Concentration of measure Probability metrics and topologies � Coulomb divergence (Large Deviations rate function) E V ( µ ) − E V ( µ ∗ ) � Coulomb metric � E ( µ − ν ) � Bounded-Lipschitz or Fortet–Mourier distance � d BL ( µ , ν ) = sup f ( x )( µ − ν )( d x ) , � f � Lip ≤ 1 � f � ∞ ≤ 1 � Kantorovich-Rubinstein duality � d BL ( µ , ν ) ≤ W 1 ( µ , ν ) = sup f ( x )( µ − ν )( d x ) . � f � Lip ≤ 1 13/28
Dynamics of gases of particles Concentration of measure Local Coulomb transport inequality Theorem (Transport type inequality – C.-Hardy-Maïda) W 1 ( µ , ν ) 2 ≤ C D E ( µ − ν ) . 14/28
Dynamics of gases of particles Concentration of measure Local Coulomb transport inequality Theorem (Transport type inequality – C.-Hardy-Maïda) D ⊂ R d compact, supp ( µ + ν ) ⊂ D, E ( µ ) < ∞ and E ( ν ) < ∞ , W 1 ( µ , ν ) 2 ≤ C D E ( µ − ν ) . 14/28
Dynamics of gases of particles Concentration of measure Local Coulomb transport inequality Theorem (Transport type inequality – C.-Hardy-Maïda) D ⊂ R d compact, supp ( µ + ν ) ⊂ D, E ( µ ) < ∞ and E ( ν ) < ∞ , W 1 ( µ , ν ) 2 ≤ C D E ( µ − ν ) . � Constant C D is ≈ Vol ( B 4 Vol ( D ) ) 14/28
Dynamics of gases of particles Concentration of measure Local Coulomb transport inequality Theorem (Transport type inequality – C.-Hardy-Maïda) D ⊂ R d compact, supp ( µ + ν ) ⊂ D, E ( µ ) < ∞ and E ( ν ) < ∞ , W 1 ( µ , ν ) 2 ≤ C D E ( µ − ν ) . � Constant C D is ≈ Vol ( B 4 Vol ( D ) ) � Extends free transport inequality to any d 14/28
Dynamics of gases of particles Concentration of measure Idea of proof of Coulomb transport inequality � Potential: if U µ ( x ) = g ∗ µ ( x ) then ∆ U µ ( x ) = − c d µ 15/28
Dynamics of gases of particles Concentration of measure Idea of proof of Coulomb transport inequality � Potential: if U µ ( x ) = g ∗ µ ( x ) then ∆ U µ ( x ) = − c d µ � Electric field: ∇ U µ ( x ) . “Carré du champ”: | ∇ U µ | 2 15/28
Dynamics of gases of particles Concentration of measure Idea of proof of Coulomb transport inequality � Potential: if U µ ( x ) = g ∗ µ ( x ) then ∆ U µ ( x ) = − c d µ � Integration by parts & Schwarz’s inequality in R d and L 2 � � f ( x )∆ U µ − ν ( x ) d x f ( x )( µ − ν )( d x ) = − c d � � � 1 / 2 | ∇ U µ − ν ( x ) | 2 d x ≤ � f � Lip | D | 15/28
Dynamics of gases of particles Concentration of measure Idea of proof of Coulomb transport inequality � Potential: if U µ ( x ) = g ∗ µ ( x ) then ∆ U µ ( x ) = − c d µ � Integration by parts & Schwarz’s inequality in R d and L 2 � � f ( x )∆ U µ − ν ( x ) d x f ( x )( µ − ν )( d x ) = − c d � � � 1 / 2 | ∇ U µ − ν ( x ) | 2 d x ≤ � f � Lip | D | � Integration by parts again � � | ∇ U µ − ν ( x ) | 2 d x = − U µ − ν ( x )∆ U µ − ν ( x ) d x = c d E ( µ − ν ) . 15/28
Dynamics of gases of particles Concentration of measure Idea of proof of Coulomb transport inequality � Potential: if U µ ( x ) = g ∗ µ ( x ) then ∆ U µ ( x ) = − c d µ � Integration by parts & Schwarz’s inequality in R d and L 2 � � f ( x )∆ U µ − ν ( x ) d x f ( x )( µ − ν )( d x ) = − c d � � � 1 / 2 | ∇ U µ − ν ( x ) | 2 d x ≤ � f � Lip | D | � Integration by parts again � � | ∇ U µ − ν ( x ) | 2 d x = − U µ − ν ( x )∆ U µ − ν ( x ) d x = c d E ( µ − ν ) . � Finally W 1 ( µ , ν ) 2 ≤ | D | c d E ( µ − ν ) . 15/28
Dynamics of gases of particles Concentration of measure Coulomb transport inequality for equilibrium measures Corollary (Transport type inequality – C.-Hardy-Maïda) � � d BL ( µ , µ ∗ ) 2 ≤ C BL E V ( µ ) − E V ( µ ∗ ) . 16/28
Dynamics of gases of particles Concentration of measure Coulomb transport inequality for equilibrium measures Corollary (Transport type inequality – C.-Hardy-Maïda) For any probability measure µ on R d with E ( µ ) < ∞ � � d BL ( µ , µ ∗ ) 2 ≤ C BL E V ( µ ) − E V ( µ ∗ ) . Moreover if V has at least quadratic growth then W 1 ( µ , µ ∗ ) 2 ≤ C W 1 � � E V ( µ ) − E V ( µ ∗ ) . 16/28
Dynamics of gases of particles Concentration of measure Coulomb transport inequality for equilibrium measures Corollary (Transport type inequality – C.-Hardy-Maïda) For any probability measure µ on R d with E ( µ ) < ∞ � � d BL ( µ , µ ∗ ) 2 ≤ C BL E V ( µ ) − E V ( µ ∗ ) . Moreover if V has at least quadratic growth then W 1 ( µ , µ ∗ ) 2 ≤ C W 1 � � E V ( µ ) − E V ( µ ∗ ) . � Growth condition is optimal for W 1 16/28
Dynamics of gases of particles Concentration of measure Concentration of measure for Coulomb gases Theorem (Concentration inequality – C.-Hardy-Maïda) If V has reasonable growth then for every β , n , r � � ≤ e − a β n 2 r 2 P d BL ( µ n , µ ∗ ) ≥ r . Moreover if V has at least quadratic growth then W 1 instead of d BL . � Optimal order in n 17/28
Dynamics of gases of particles Concentration of measure Concentration of measure for Coulomb gases Theorem (Concentration inequality – C.-Hardy-Maïda) If V has reasonable growth then for every β , n , r � � ≤ e − a β n 2 r 2 + 1 d = 2 ( β 4 n log n )+ b β n 2 − 2 / d + c ( β ) n . P d BL ( µ n , µ ∗ ) ≥ r Moreover if V has at least quadratic growth then W 1 instead of d BL . � Optimal order in n � Explicit constants a , b , c if V is quadratic 17/28
Dynamics of gases of particles Concentration of measure Concentration of measure for Coulomb gases Theorem (Concentration inequality – C.-Hardy-Maïda) If V has reasonable growth then for every β , n , r � � ≤ e − a β n 2 r 2 + 1 d = 2 ( β 4 n log n )+ b β n 2 − 2 / d + c ( β ) n . P d BL ( µ n , µ ∗ ) ≥ r Moreover if V has at least quadratic growth then W 1 instead of d BL . � Optimal order in n � Explicit constants a , b , c if V is quadratic � Implies speed of convergence: �� log n � � if d = 2 , ≤ e − cn 2 r 2 , P W 1 ( µ n , µ ∗ ) ≥ r r ≥ n n − 1 / d if d ≥ 3 . 17/28
Dynamics of gases of particles Concentration of measure Concentration of measure for Coulomb gases Theorem (Concentration inequality – C.-Hardy-Maïda) If V has reasonable growth then for every β , n , r � � ≤ e − a β n 2 r 2 + 1 d = 2 ( β 4 n log n )+ b β n 2 − 2 / d + c ( β ) n . P d BL ( µ n , µ ∗ ) ≥ r Moreover if V has at least quadratic growth then W 1 instead of d BL . � Optimal order in n � Explicit constants a , b , c if V is quadratic � Implies speed of convergence: �� log n � � if d = 2 , ≤ e − cn 2 r 2 , P W 1 ( µ n , µ ∗ ) ≥ r r ≥ n n − 1 / d if d ≥ 3 . � See also Rougerie & Serfaty 17/28
Dynamics of gases of particles Concentration of measure Idea of proof of concentration � Starting point P ( W 1 ( µ n , µ ∗ ) ≥ r ) = 1 � W 1 ( µ n , µ ∗ ) ≥ r e − β 2 n 2 E � = V ( µ n ) d x . Z 18/28
Dynamics of gases of particles Concentration of measure Idea of proof of concentration � Starting point P ( W 1 ( µ n , µ ∗ ) ≥ r ) = 1 � W 1 ( µ n , µ ∗ ) ≥ r e − β 2 n 2 E � = V ( µ n ) d x . Z � Normalizing constant � � β �� 1 n 2 β Z ≤ exp 2 E V ( µ ∗ ) − n 2 E ( µ ∗ ) − S ( µ ∗ ) . 18/28
Dynamics of gases of particles Concentration of measure Idea of proof of concentration � Starting point P ( W 1 ( µ n , µ ∗ ) ≥ r ) = 1 � W 1 ( µ n , µ ∗ ) ≥ r e − β 2 n 2 E � = V ( µ n ) d x . Z � Normalizing constant � � β �� 1 n 2 β Z ≤ exp 2 E V ( µ ∗ ) − n 2 E ( µ ∗ ) − S ( µ ∗ ) . � Regularization: g superharmonic, µ ( ε ) = µ n ∗ λ ε , n n − n 2 E � = V ( µ n ) ≤ − n 2 E V ( µ ( ε ) ∑ n )+ n E ( λ ε )+ n ( V ∗ λ ε − V )( x i ) . i = 1 18/28
Dynamics of gases of particles Concentration of measure Idea of proof of concentration � Starting point P ( W 1 ( µ n , µ ∗ ) ≥ r ) = 1 � W 1 ( µ n , µ ∗ ) ≥ r e − β 2 n 2 E � = V ( µ n ) d x . Z � Normalizing constant � � β �� 1 n 2 β Z ≤ exp 2 E V ( µ ∗ ) − n 2 E ( µ ∗ ) − S ( µ ∗ ) . � Regularization: g superharmonic, µ ( ε ) = µ n ∗ λ ε , n n − n 2 E � = V ( µ n ) ≤ − n 2 E V ( µ ( ε ) ∑ n )+ n E ( λ ε )+ n ( V ∗ λ ε − V )( x i ) . i = 1 � Coulomb transport − E V ( µ ( ε ) 1 ( µ ( ε ) n )+ E V ( µ ∗ ) ≤ − 1 C W 2 n , µ ∗ ) . 18/28
Dynamics of gases of particles Concentration of measure Concentration for spectrum of Ginibre matrices Corollary (Ginibre Random Matrices) If M is n × n with iid Gaussian entries of variance 1 n in C i = 1 | x i | 2 ) ∏ i < j | x i − x j | 2 � Eigenvalues of M ∝ exp( − n ∑ n 19/28
Dynamics of gases of particles Concentration of measure Concentration for spectrum of Ginibre matrices Corollary (Ginibre Random Matrices) If M is n × n with iid Gaussian entries of variance 1 n in C i = 1 | x i | 2 − ∑ i � = j g ( x i − x j )) � Eigenvalues of M ∝ exp( − n ∑ n � Here d = 2, β = 2, V = |·| 2 19/28
Dynamics of gases of particles Concentration of measure Concentration for spectrum of Ginibre matrices Corollary (Ginibre Random Matrices) If M is n × n with iid Gaussian entries of variance 1 n in C then � � ≤ e − 1 4 C n 2 r 2 + 1 2 n log n + n [ 1 C + 3 2 − log π ] . P W 1 ( µ n , µ • ) ≥ r i = 1 | x i | 2 − ∑ i � = j g ( x i − x j )) � Eigenvalues of M ∝ exp( − n ∑ n � Here d = 2, β = 2, V = |·| 2 �� � log( n ) � Provides a.s. W 1 ( µ n , µ • ) = O . n 19/28
Dynamics of gases of particles Concentration of measure Concentration for spectrum of Ginibre matrices Corollary (Ginibre Random Matrices) If M is n × n with iid Gaussian entries of variance 1 n in C then � � ≤ e − 1 4 C n 2 r 2 + 1 2 n log n + n [ 1 C + 3 2 − log π ] . P W 1 ( µ n , µ • ) ≥ r i = 1 | x i | 2 − ∑ i � = j g ( x i − x j )) � Eigenvalues of M ∝ exp( − n ∑ n � Here d = 2, β = 2, V = |·| 2 �� � log( n ) � Provides a.s. W 1 ( µ n , µ • ) = O . n � Bernoulli ± 1 random matrices (universality) µ n → µ • (Tao-Vu 2010) but P ( W 1 ( µ n , µ • ) ≥ r ) is not known 19/28
Dynamics of gases of particles Concentration of measure Concentration for spectrum of Ginibre random matrices 1.0 0.5 0.0 −0.5 −1.0 −1.0 −0.5 0.0 0.5 1.0 plot(eig(rand(n,n)+i*randn(n,n))/sqrt(2*n))) Dynamics leaving invariant in law this picture 20/28
Dynamics of gases of particles Dynamics for planar case Outline Introduction Coulomb gases Concentration of measure Dynamics for planar case 21/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � 2 d X n d B n t − ∇ H ( X n t = t ) d t . β n 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 − 2 t d t − 2 d X i , n d B i , n nX i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t t = ( X i , n � Mean-field interacting particle system X n t ) 1 ≤ i ≤ n 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t t = ( X i , n � Mean-field interacting particle system X n t ) 1 ≤ i ≤ n � 2D: no convexity / Brascamp–Lieb / Bakry–Émery / Caffarelli 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t t = ( X i , n � Mean-field interacting particle system X n t ) 1 ≤ i ≤ n � 2D: no convexity / Brascamp–Lieb / Bakry–Émery / Caffarelli � 1D log-gases are log-concave: 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t t = ( X i , n � Mean-field interacting particle system X n t ) 1 ≤ i ≤ n � 2D: no convexity / Brascamp–Lieb / Bakry–Émery / Caffarelli � 1D log-gases are log-concave: ◮ Freeman Dyson – Journal of Mathematical Physics (1962) A Brownian-motion model for the eigenvalues of a random matrix. 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t t = ( X i , n � Mean-field interacting particle system X n t ) 1 ≤ i ≤ n � 2D: no convexity / Brascamp–Lieb / Bakry–Émery / Caffarelli � 1D log-gases are log-concave: ◮ Freeman Dyson – Journal of Mathematical Physics (1962) A Brownian-motion model for the eigenvalues of a random matrix. ◮ László Erd˝ os & Horng-Tzer Yau – Courant Lecture Notes (2017) Dynamical Approach To Random Matrix Theory 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t t = ( X i , n � Mean-field interacting particle system X n t ) 1 ≤ i ≤ n � 2D: no convexity / Brascamp–Lieb / Bakry–Émery / Caffarelli � 1D log-gases are log-concave: ◮ Freeman Dyson – Journal of Mathematical Physics (1962) A Brownian-motion model for the eigenvalues of a random matrix. ◮ László Erd˝ os & Horng-Tzer Yau – Courant Lecture Notes (2017) Dynamical Approach To Random Matrix Theory ◮ Michel Lassalle – CRAS (1991) Polynômes de Hermite généralisés 22/28
Dynamics of gases of particles Dynamics for planar case Ginibre process i = 1 | x i | 2 + 1 � Ginibre energy H ( x 1 ,..., x n ) = 1 1 n ∑ n n 2 ∑ i � = j log | x i − x j | � Ginibre process on D ⊂ C n = ( R 2 ) n reversible for P ∝ e − β n H � X j , n − X i , n 2 α n − 2 α n t d t − 2 α n d X i , n d B i , n n X i , n n 2 ∑ t t = t | 2 d t . t t | X i , n − X j , n β n j � = i t t = ( X i , n � Mean-field interacting particle system X n t ) 1 ≤ i ≤ n � 2D: no convexity / Brascamp–Lieb / Bakry–Émery / Caffarelli � 1D log-gases are log-concave: ◮ Freeman Dyson – Journal of Mathematical Physics (1962) A Brownian-motion model for the eigenvalues of a random matrix. ◮ László Erd˝ os & Horng-Tzer Yau – Courant Lecture Notes (2017) Dynamical Approach To Random Matrix Theory ◮ Michel Lassalle – CRAS (1991) Polynômes de Hermite généralisés ◮ Optimal Poincaré and log-Sobolev constants (C.-Lehec) 22/28
Dynamics of gases of particles Dynamics for planar case Second moment dynamics Theorem (Second moment dynamics – Bolley-C.-Fontbona) ( R t ) t ≥ 0 = ( 1 n � X t � 2 ) t ≥ 0 is an ergodic Cox–Ingersoll–Ross process: � � � 8 α n + n − 1 R t d B t + 4 α n n d R t = 2 n − R t d t . n β n β n n 23/28
Dynamics of gases of particles Dynamics for planar case Second moment dynamics Theorem (Second moment dynamics – Bolley-C.-Fontbona) ( R t ) t ≥ 0 = ( 1 n � X t � 2 ) t ≥ 0 is an ergodic Cox–Ingersoll–Ross process: � � � 8 α n + n − 1 R t d B t + 4 α n n d R t = 2 n − R t d t . n β n β n n In particular, with γ n = Gamma ( n + n − 1 2 n β n , β n ) , for any t ≥ 0 W 1 ( Law ( R t ) , γ n ) ≤ e − 4 α n n t W 1 ( Law ( R 0 ) , γ n ) . 23/28
Dynamics of gases of particles Dynamics for planar case Second moment dynamics Theorem (Second moment dynamics – Bolley-C.-Fontbona) ( R t ) t ≥ 0 = ( 1 n � X t � 2 ) t ≥ 0 is an ergodic Cox–Ingersoll–Ross process: � � � 8 α n + n − 1 R t d B t + 4 α n n d R t = 2 n − R t d t . n β n β n n Furthermore for any x ∈ D and t ≥ 0 , we have � 1 − 1 �� n t � 2 + n E ( R t | R 0 = r ) = r e − 4 α n 1 − e − 4 α n n t + . 2 n β n i = 1 | z i | 2 + c N . Eigenvectors: ∑ N i = 1 ℜ ( z i ) , ∑ N i = 1 ℑ ( z i ) , ∑ N 23/28
Dynamics of gases of particles Dynamics for planar case McKean–Vlasov mean-field limit Theorem? (MKV Mean-field limit – Bolley-C.-Fontbona) If σ = lim n → ∞ α n β n ∈ [ 0 , ∞ ) then lim n → ∞ µ n t = µ t with ∂ t µ t = σ ∆ µ t + ∇ · (( ∇ V + ∇ g ∗ µ t ) µ t ) . � X i , n t − X j , n � d X i , n 2 α n β n d B i , n − 2 α n n X i , n t d t − 2 α n = t | 2 d t . n ∑ j � = i t | X j , n t − X i , n t t 24/28
Dynamics of gases of particles Dynamics for planar case McKean–Vlasov mean-field limit Theorem? (MKV Mean-field limit – Bolley-C.-Fontbona) If σ = lim n → ∞ α n β n ∈ [ 0 , ∞ ) then lim n → ∞ µ n t = µ t with ∂ t µ t = σ ∆ µ t + ∇ · (( ∇ V + ∇ g ∗ µ t ) µ t ) . � X i , n t − X j , n � d X i , n 2 α n β n d B i , n − 2 α n n X i , n t d t − 2 α n = t | 2 d t . n ∑ j � = i t | X j , n t − X i , n t t n t = 1 � Empirical measure µ n ∑ δ X i , n n t i = 1 24/28
Dynamics of gases of particles Dynamics for planar case McKean–Vlasov mean-field limit Theorem? (MKV Mean-field limit – Bolley-C.-Fontbona) If σ = lim n → ∞ α n β n ∈ [ 0 , ∞ ) then lim n → ∞ µ n t = µ t with ∂ t µ t = σ ∆ µ t + ∇ · (( ∇ V + ∇ g ∗ µ t ) µ t ) . � X i , n t − X j , n � d X i , n 2 α n β n d B i , n − 2 α n n X i , n t d t − 2 α n = t | 2 d t . n ∑ j � = i t | X j , n t − X i , n t t n t = 1 � Empirical measure µ n ∑ δ X i , n n t i = 1 � Some sort of law of large numbers 24/28
Dynamics of gases of particles Dynamics for planar case McKean–Vlasov mean-field limit Theorem? (MKV Mean-field limit – Bolley-C.-Fontbona) If σ = lim n → ∞ α n β n ∈ [ 0 , ∞ ) then lim n → ∞ µ n t = µ t with ∂ t µ t = σ ∆ µ t + ∇ · (( ∇ V + ∇ g ∗ µ t ) µ t ) . � X i , n t − X j , n � d X i , n 2 α n β n d B i , n − 2 α n n X i , n t d t − 2 α n = t | 2 d t . n ∑ j � = i t | X j , n t − X i , n t t n t = 1 � Empirical measure µ n ∑ δ X i , n n t i = 1 � Some sort of law of large numbers � Regimes: ( α n , β n ) = ( n , n 2 ) and ( α n , β n ) = ( n , n ) 24/28
Dynamics of gases of particles Dynamics for planar case McKean–Vlasov mean-field limit Theorem? (MKV Mean-field limit – Bolley-C.-Fontbona) If σ = lim n → ∞ α n β n ∈ [ 0 , ∞ ) then lim n → ∞ µ n t = µ t with ∂ t µ t = σ ∆ µ t + ∇ · (( ∇ V + ∇ g ∗ µ t ) µ t ) . � X i , n t − X j , n � d X i , n 2 α n β n d B i , n − 2 α n n X i , n t d t − 2 α n = t | 2 d t . n ∑ j � = i t | X j , n t − X i , n t t n t = 1 � Empirical measure µ n ∑ δ X i , n n t i = 1 � Some sort of law of large numbers � Regimes: ( α n , β n ) = ( n , n 2 ) and ( α n , β n ) = ( n , n ) � Carrillo–McCann–Villani, Fournier–Hauray–Mischler, Serfaty–Duerinckx, . . . 24/28
Dynamics of gases of particles Dynamics for planar case Numerical analysis and stochastic simulation � Overdamped Langevin dynamics � α d X t = − α ∇ H ( X t ) d t + β d B t 25/28
Dynamics of gases of particles Dynamics for planar case Numerical analysis and stochastic simulation � Overdamped Langevin dynamics � α d X t = − α ∇ H ( X t ) d t + β d B t � t 1 0 δ X s d s = e − β H � Ergodic theorem lim t t → ∞ 25/28
Dynamics of gases of particles Dynamics for planar case Numerical analysis and stochastic simulation � Overdamped Langevin dynamics � α d X t = − α ∇ H ( X t ) d t + β d B t � t 1 0 δ X s d s = e − β H � Ergodic theorem lim t t → ∞ � → Metropolis Adjusted Langevin Algorithm (MALA) 25/28
Dynamics of gases of particles Dynamics for planar case Numerical analysis and stochastic simulation � Overdamped Langevin dynamics � α d X t = − α ∇ H ( X t ) d t + β d B t � t 1 0 δ X s d s = e − β H � Ergodic theorem lim t t → ∞ � → Metropolis Adjusted Langevin Algorithm (MALA) � Underdamped Langevin dynamics (adding momentum/inertia) � d X t = ∇ U ( Y t ) d t � γ = − ∇ H ( X t ) − γ ∇ U ( Y t ) d t + β d B t . d Y t 25/28
Dynamics of gases of particles Dynamics for planar case Numerical analysis and stochastic simulation � Overdamped Langevin dynamics � α d X t = − α ∇ H ( X t ) d t + β d B t � t 1 0 δ X s d s = e − β H � Ergodic theorem lim t t → ∞ � → Metropolis Adjusted Langevin Algorithm (MALA) � Underdamped Langevin dynamics (adding momentum/inertia) � d X t = ∇ U ( Y t ) d t � γ = − ∇ H ( X t ) − γ ∇ U ( Y t ) d t + β d B t . d Y t � t 1 0 δ ( X s , Y s ) d s = e − β H ⊗ e − γ U � Ergodic theorem lim t t → ∞ 25/28
Dynamics of gases of particles Dynamics for planar case Numerical analysis and stochastic simulation � Overdamped Langevin dynamics � α d X t = − α ∇ H ( X t ) d t + β d B t � t 1 0 δ X s d s = e − β H � Ergodic theorem lim t t → ∞ � → Metropolis Adjusted Langevin Algorithm (MALA) � Underdamped Langevin dynamics (adding momentum/inertia) � d X t = ∇ U ( Y t ) d t � γ = − ∇ H ( X t ) − γ ∇ U ( Y t ) d t + β d B t . d Y t � t 1 0 δ ( X s , Y s ) d s = e − β H ⊗ e − γ U � Ergodic theorem lim t t → ∞ � → Hamiltonian or Hybrid Monte Carlo (HMC, C.–Ferré–Stoltz) 25/28
Dynamics of gases of particles Dynamics for planar case Numerical analysis and stochastic simulation � Overdamped Langevin dynamics � α d X t = − α ∇ H ( X t ) d t + β d B t � t 1 0 δ X s d s = e − β H � Ergodic theorem lim t t → ∞ � → Metropolis Adjusted Langevin Algorithm (MALA) � Underdamped Langevin dynamics (adding momentum/inertia) � d X t = ∇ U ( Y t ) d t � γ = − ∇ H ( X t ) − γ ∇ U ( Y t ) d t + β d B t . d Y t � t 1 0 δ ( X s , Y s ) d s = e − β H ⊗ e − γ U � Ergodic theorem lim t t → ∞ � → Hamiltonian or Hybrid Monte Carlo (HMC, C.–Ferré–Stoltz) � → Geometric ergodicity via Lyapunov (Lu–Mattingly) 25/28
Dynamics of gases of particles Dynamics for planar case Eight trajectories for a Dyson Ornstein-Uhlenbeck HMC 26/28
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.