Cross-domain Modeling and Optimization of High-speed Visual Servo - PowerPoint PPT Presentation
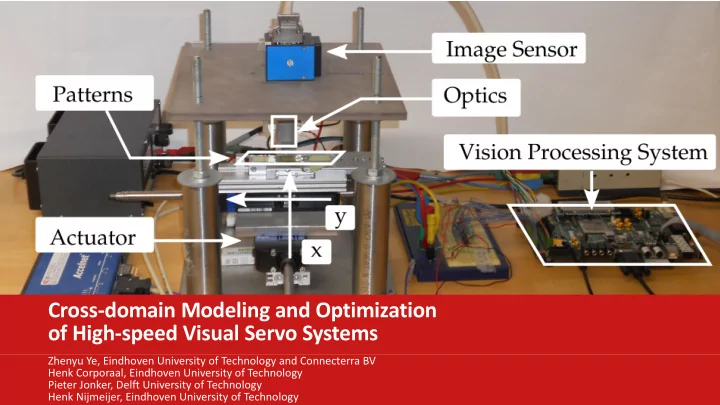
Cross-domain Modeling and Optimization of High-speed Visual Servo Systems Zhenyu Ye, Eindhoven University of Technology and Connecterra BV Henk Corporaal, Eindhoven University of Technology Pieter Jonker, Delft University of Technology Henk
Cross-domain Modeling and Optimization of High-speed Visual Servo Systems Zhenyu Ye, Eindhoven University of Technology and Connecterra BV Henk Corporaal, Eindhoven University of Technology Pieter Jonker, Delft University of Technology Henk Nijmeijer, Eindhoven University of Technology
Visual Servo Systems: a Multi-domain View Focus: controlled and structured environments. 2 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Challenges and Proposed Solutions Challenge 1 Limitations of visual feedback: low sample rate, large delay, coarse quantization . Proposed solution: Design template for high-speed vision processing. Challenge 2 Cross-domain couplings and trade-offs. Proposed solution: A framework of methods for cross-domain modeling and optimization. 3 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Axiomatic Design: an Example Dependent Design Design : Dependence Parameters Matrix Parameters : Independence Image sensor Sample period Vision algorithm Quantization error Processing architecture Delay Plant Controller Performance criteria Precision Bandwidth N. P. Suh, “Axiomatic design theory for systems,” Research in Engineering Design, vol. 10, no. 4, pp. 189–209, 1998. 4 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Design Matrix Obtained by Design Template Image sensor Sample period Vision algorithm Quantization error Processing architecture Delay Plant Controller Time Sensor Processing Processing Frame 1 Processing Readout Stage 1 Stage 2 Processing Sensor Processing Sample Period Frame 2 Stage 1 Readout Stage 2 Image frame 5 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Delay: Coupling of Algorithm and Architecture Approach: (1) algorithmic patterns (2) architecture template (3) high-level synthesis Delay of Vision Processing 6 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
3 configurations of architecture Case Study 3 image sensor sizes 3 vision algorithms Increasing quantization (A)(B)(C)(D) are Pareto-optimal configurations Increasing delay 7 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Motion Error Vision Error Performance After (a) Precision Controller Optimization (b) Bandwidth (a) Precision (b) Bandwidth Root-Mean-Squared-Error (RMSE) Error of tracking sinusoidal signals of tracking a constant reference of different frequencies Increasing reference frequency Increasing tracking error Increasing tracking error 8 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Conclusions 1. Cross-domain modeling and optimization are necessary . Demonstrated improvement: • 20% for tracking a constant reference. • 43% for high-bandwidth applications. 2. The demonstrated improvements are only achievable by cross-domain modeling and optimization. 3. This paper provides effective methods for such a purpose. Thank you. 9 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Backup Slides 10 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Visual Servo Systems: a Multi-domain View Focus on high-speed visual servo systems in structured environments . • Require little adaptability. Predefined patterns are often used. • Typically optimized for accuracy and bandwidth . 11 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Modeling Sample Period and Measurement Error Exposure Number Quantization time of pixels function Sample Measurement period Rate of readout Sensitivity error 12 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Modeling Measurement Error Image sensor Sample period Vision algorithm Quantization error Processing architecture Delay Plant Controller Quantization function Quantization error Position of sensitivity image frame Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Design Template of High-speed Vision Systems Pipelining processing in multiple stages Decoupling sensor Optional large buffer readout from for multi-frame algo. processing 14 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Controller Gain Simplify dependency of K Optimizing K: analytical method and simulaiton 15 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Controller Gain Simplify dependency of K 16 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Image Sensors 17 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Vision Algorithms Algorithm 1 : Algorithm 2 & 3 : 18 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Processing Stages of Vision Algorithms 19 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Vision Algorithm 3: Complexity Analysis 20 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Vision Algorithm 3 on Architecture Template 21 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
System Diagram Simplified model for analytical methods: quantized sampled-data system with time delay. 22 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Quantization Error Error “e” depends on image position “x” and displacement “d”. Vision algorithms is lumped into function “g()”. 23 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Sample Period and Delay 24 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Tracking Errors of a Constant Reference 25 Cross-domain Modeling and Optimization of High-speed Visual Servo Systems
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.