Counter/Timers Overview ATmega328P has two _____ and one ______ - PowerPoint PPT Presentation
13.1 13.2 Counter/Timers Overview ATmega328P has two _____ and one ______ counters. Can configure to count at some frequency up to some value (a.k.a. ________________), generate an _____________ Unit 13 Timers and Counters and
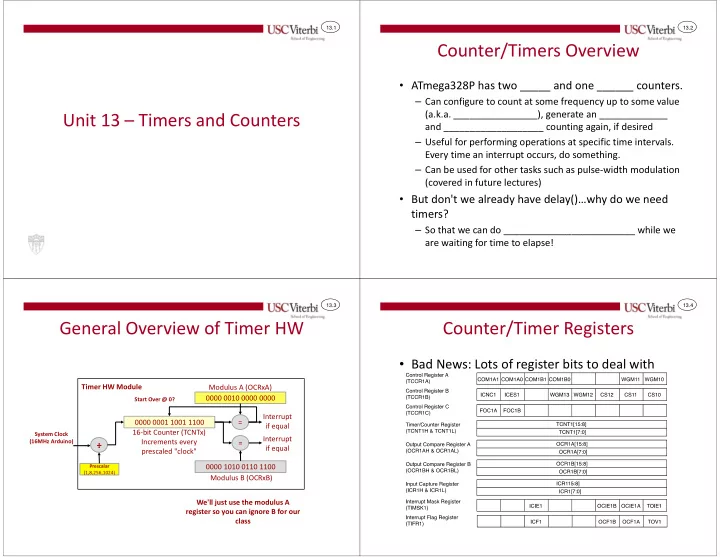
13.1 13.2 Counter/Timers Overview • ATmega328P has two _____ and one ______ counters. – Can configure to count at some frequency up to some value (a.k.a. ________________), generate an _____________ Unit 13 – Timers and Counters and ___________________ counting again, if desired – Useful for performing operations at specific time intervals. Every time an interrupt occurs, do something. – Can be used for other tasks such as pulse-width modulation (covered in future lectures) • But don't we already have delay()…why do we need timers? – So that we can do _________________________ while we are waiting for time to elapse! 13.3 13.4 General Overview of Timer HW Counter/Timer Registers • Bad News: Lots of register bits to deal with Timer HW Module Modulus A (OCRxA) 0000 0010 0000 0000 Start Over @ 0? Interrupt 0000 0001 1001 1100 = if equal 16-bit Counter (TCNTx) System Clock Interrupt (16MHz Arduino) Increments every = ÷ ÷ ÷ ÷ if equal prescaled "clock" 0000 1010 0110 1100 Prescalar (1,8,256,1024) Modulus B (OCRxB) We'll just use the modulus A register so you can ignore B for our class
13.5 13.6 Counter/Timer Registers Computing the Desired Cycle Delay • Good News: Can _______________ for simple timing • Primary step : calculate how many processor _________________ are required for your desired delay – Desired clock cycles = ________________ × ______________ – Arduino UNO clock is fixed at 16 MHz • Example: 0.25 second delay with a 16 MHz clock – Desired clock cycles = 16,000,000 c/s × 0.25s = _____________ cycles • Problem: The desired value you calculate must fit in at most a __________________ (i.e. max _________) – If the number is bigger than 65,535 then a prescalar must be used to reduce the clock frequency to the counter from 16MHz to something slower 13.7 13.8 Calculating the Prescalar Counter/Timer Initialization 1 • Set the mode for “Clear Timer on Compare” (CTC) – WGM13 = ________, WGM12 = __________ • The counter prescaler divides the processor clock down to a – This tells the hardware to _______________ at 0 lower frequency so the counter is counting ______________. once the counter is reaches your desired value • Can divide the processor clock by four different powers of // Set to CTC mode • Enable “Output Compare A Match Interrupt” TCCR1B |= (1 << WGM12); two: _____, _______, ________, or _________. – OCIE1A = 1 // Enable Timer Interrupt • Load the 16-bit counter modulus into ___________ TIMSK1 |= (1 << OCIE1A); • Try prescalar options until the cycle count fits in 16-bits – This is the value the counter will count up to and // Load the MAX count – 4,000,000 / 8 = 500,000 // Assuming prescalar=256 then generate an interrupt. // counting to 15625 = – 4,000,000 / 64 = 62,500 // 0.25s w/ 16 MHz clock – The counter then clears to zero and starts counting OCR1A = 15625; 4,000,000 / 256 = 15,625 – up again. – In C, the register can be accessed as… – 4,000,000 / 1024 = 3906.25 • A 16-bit value "OCR1A" • In this example, either of the _____________ could work but Or as two eight bit values "OCR1AH" and OCR1AL”. • since we can only store integers in our timer count registers the last one would not yield exactly 0.25s (more like 0.249984s)
13.9 13.10 Counter/Timer Initialization 2 Counter/Timer Initialization 3 • Select the prescalar value with bits: • Make sure you have an appropriate #include <avr/io.h> #include <avr/interrupt.h> CS12, CS11, CS10 in TCCR1B reg. ISR function defined // Set to CTC mode volatile unsigned char qsecs = 0; TCCR1B |= (1 << WGM12); 000 = stop ⟸ Timer starts when – Using name ISR(TIMER1_COMPA_vect) void init_timer1(unsigned short m) – { // Enable Timer Interrupt TCCR1B |= (1 << WGM12); prescaler set to non-zero TIMSK1 |= (1 << OCIE1A); TIMSK1 |= (1 << OCIE1A); OCR1A = m; – 001 = clock/1 // Load the MAX count // Assuming prescalar=256 TCCR1B |= (1 << CS12); // counting to 15625 = } – 010 = clock/8 // 0.25s w/ 16 MHz clock int main() OCR1A = 15625; { – 011 = clock/64 init_timer1(15625); // Set prescalar = 256 – 100 = clock/256 // and start counter sei(); TCCR1B |= (1 << CS12); – 101 = clock/1024 while(){ // do something w/ qsecs // Enable interrupts • Enable _________________________ sei(); } return 0; } ISR(TIMER1_COMPA_vect){ // increments every 0.25s qsecs++; } 13.11 13.12 8-bit Counter/Timers ISR Names • The other two counters are similar but only 8-bits. • In CTC mode, an "Output Compare A Match Interrupt" will vector to an ISR with these names: • Same principle: find the count modulus that fits in an 8-bit value. – ISR(TIMER0_COMPA_vect) { } /* 8-bit Timer 0 */ – ISR(TIMER1_COMPA_vect) { } /* 16-bit Timer 1 */ – ISR(TIMER2_COMPA_vect) { } /* 8-bit Timer 2 */
13.13 13.14 An Example • Let's design a stopwatch (_______ units) • What are the inputs and outputs • Inputs – Buttons for ______________ – ____________________ • Outputs – LCD [___________ time format] Stopwatch Lab • Question: – What do I need state for in USING STATE MACHINES TO this design? Answer: • SIMPLIFY & ORGANIZE DESIGNS Start/Stop – Anytime you provide the same input (Top Btn) and different outputs/actions occur, there is state inside Lap/Reset – Different actions for same button press (Bottom/Btn) 13.15 13.16 Why Use State Machines Why Use State Machines • Easier to decouple relationship between input and output • It can be very hard/difficult to design a system • Let inputs _________________, then examine the state to where all the inputs can __________ each of decide what ________________ should be or do the outputs (i.e. an all-to-all relationship) • Similar to the popular MVC GUI & Web app design approach – Model->View->Controller (MVC design) – Model (State), View (Output), Controller (Input) Button1 Button1 LCD LCD Button 2 Button 2 State Other Output Other Timer Output Timer
13.17 13.18 Stopwatch Application Suggested Guidelines ... • What states do we need to differentiate button presses • Use a timer to generate an int main() { Start_Stop Btn. Lap_Reset interrupt every 0.1s // be sure to init. state On Startup unsigned char state = 0; • Use the timer ISR to // init and start timer Stopped Started Lapped perform ____________ // used to check inputs // and perform state updates while(1) Start_Stop and ______________ Lap_Reset / Lap_Reset || { Btn. Set_to_Zero Start_Stop // Poll inputs and update • Use __________ in main() // state } • When timer interrupt occurs examine the state to decide how return 0; to detect input button to update the display (or just leave current displayed time) } presses and update state • What else in this design is technically "state"? // Use to perform output tasks ISR(TIMER1_COMPA_vect) – Time: SS.Tenths (but not necessarily { // update time and – Every time the timer interrupts check to see if time needs to update & // display based on state display unless necessary) increment the time if necessary }
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.