Constrained evolution problems on a metric graph c 1 Luka Grubi si - PowerPoint PPT Presentation
Constrained evolution problems on a metric graph c 1 Luka Grubi si Department of Mathematics, University of Zagreb luka.grubisic@math.hr Differential Operators on Graphs and Waveguides, TU Graz, 2019. 1 joint work with M. Ljulj, V. Mehrmann
t 1D stent model For the stent model we need: V – vertices ( n V number of vertices) E – edges ( n E number of edges) L. Grubiˇ si´ c Constrained evolution 25.2.2019 12 / 49
t 1D stent model For the stent model we need: V – vertices ( n V number of vertices) E – edges ( n E number of edges) N = ( V , E ) – graph L. Grubiˇ si´ c Constrained evolution 25.2.2019 12 / 49
1D stent model For the stent model we need: V – vertices ( n V number of vertices) E – edges ( n E number of edges) N = ( V , E ) – graph parametrization of edges Φ e : [0 , ℓ e ] → R 3 (for t e and Q e ) L. Grubiˇ si´ c Constrained evolution 25.2.2019 12 / 49
1D stent model For the stent model we need: V – vertices ( n V number of vertices) E – edges ( n E number of edges) N = ( V , E ) – graph parametrization of edges Φ e : [0 , ℓ e ] → R 3 (for t e and Q e ) material and cross–section properties (for H e ) L. Grubiˇ si´ c Constrained evolution 25.2.2019 12 / 49
Two options 1 Place the contact conditions in the Sobolev space on a graph 2 Consider a larger product Sobolev space and leave contact conditions in vertices as constraints L. Grubiˇ si´ c Constrained evolution 25.2.2019 13 / 49
❱ ❱ ❱ ❱ ✈ t ✇ ❱ ❯ ✇ ❢ ✈ ♣ ✈ ♣ ✈ q ✇ q ✇ ❱ 1D stent model – in H 1 ( N ; R 6 ) Unknown: ❯ = ( ❯ 1 , . . . , ❯ n E ) = (( ˜ ✉ 1 , ˜ ω 1 ) , . . . , ( ˜ ✉ n E , ˜ ω n E )) ✈ 1 , ˜ ✇ 1 ) , . . . , ( ˜ Test function: ❱ = ( ❱ 1 , . . . , ❱ n E ) = (( ˜ ✈ n E , ˜ ✇ n E )) L. Grubiˇ si´ c Constrained evolution 25.2.2019 14 / 49
❯ ✇ ❢ ✈ ♣ ✈ ♣ ✈ q ✇ q ✇ ❱ 1D stent model – in H 1 ( N ; R 6 ) Unknown: ❯ = ( ❯ 1 , . . . , ❯ n E ) = (( ˜ ✉ 1 , ˜ ω 1 ) , . . . , ( ˜ ✉ n E , ˜ ω n E )) ✈ 1 , ˜ ✇ 1 ) , . . . , ( ˜ Test function: ❱ = ( ❱ 1 , . . . , ❱ n E ) = (( ˜ ✈ n E , ˜ ✇ n E )) Function spaces on the graph N : n E � H 1 ((0 , ℓ e i ); R 6 ) : H 1 ( N ; R 6 ) = � ❱ ∈ i =1 ❱ i (( Φ i ) − 1 ( v )) = ❱ j (( Φ j ) − 1 ( v )) , v ∈ V , v ∈ e i ∩ e j � , ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } . N L. Grubiˇ si´ c Constrained evolution 25.2.2019 14 / 49
❯ ✇ ❢ ✈ ♣ ✈ ♣ ✈ q ✇ q ✇ ❱ 1D stent model – in H 1 ( N ; R 6 ) Unknown: ❯ = ( ❯ 1 , . . . , ❯ n E ) = (( ˜ ✉ 1 , ˜ ω 1 ) , . . . , ( ˜ ✉ n E , ˜ ω n E )) ✈ 1 , ˜ ✇ 1 ) , . . . , ( ˜ Test function: ❱ = ( ❱ 1 , . . . , ❱ n E ) = (( ˜ ✈ n E , ˜ ✇ n E )) Function spaces on the graph N : n E � H 1 ((0 , ℓ e i ); R 6 ) : H 1 ( N ; R 6 ) = � ❱ ∈ i =1 ❱ i (( Φ i ) − 1 ( v )) = ❱ j (( Φ j ) − 1 ( v )) , v ∈ V , v ∈ e i ∩ e j � , ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } . N Add weak formulations for rods: L. Grubiˇ si´ c Constrained evolution 25.2.2019 14 / 49
1D stent model – in H 1 ( N ; R 6 ) Unknown: ❯ = ( ❯ 1 , . . . , ❯ n E ) = (( ˜ ✉ 1 , ˜ ω 1 ) , . . . , ( ˜ ✉ n E , ˜ ω n E )) ✈ 1 , ˜ ✇ 1 ) , . . . , ( ˜ Test function: ❱ = ( ❱ 1 , . . . , ❱ n E ) = (( ˜ ✈ n E , ˜ ✇ n E )) Function spaces on the graph N : n E � H 1 ((0 , ℓ e i ); R 6 ) : H 1 ( N ; R 6 ) = � ❱ ∈ i =1 ❱ i (( Φ i ) − 1 ( v )) = ❱ j (( Φ j ) − 1 ( v )) , v ∈ V , v ∈ e i ∩ e j � , ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } . N Add weak formulations for rods: find ❯ ∈ V stent such that � ℓ i � ℓ i n E n E i · ˜ ω i ) ′ · ˜ ˜ � Q i H i ( Q i ) T ( ˜ ✇ ′ dx 1 = � ❢ ✈ dx 1 0 0 i =1 i =1 n E � ♣ i ( ℓ i ) ˜ ✈ ( ℓ i ) − ˜ ♣ i (0) ˜ q i ( ℓ i ) ˜ ✇ ( ℓ i ) − ˜ q i (0) ˜ + ˜ ✈ (0) + ˜ ✇ (0) , ❱ ∈ V stent i =1 L. Grubiˇ si´ c Constrained evolution 25.2.2019 14 / 49
1D stent model – in H 1 ( N ; R 6 ) Unknown: ❯ = ( ❯ 1 , . . . , ❯ n E ) = (( ˜ ✉ 1 , ˜ ω 1 ) , . . . , ( ˜ ✉ n E , ˜ ω n E )) Test function: ❱ = ( ❱ 1 , . . . , ❱ n E ) = (( ˜ ✈ 1 , ˜ ✇ 1 ) , . . . , ( ˜ ✈ n E , ˜ ✇ n E )) Function spaces on the graph N : n E � H 1 ((0 , ℓ e i ); R 6 ) : H 1 ( N ; R 6 ) = � ❱ ∈ i =1 ❱ i (( Φ i ) − 1 ( v )) = ❱ j (( Φ j ) − 1 ( v )) , v ∈ V , v ∈ e i ∩ e j � , ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } . N Add weak formulations for rods: find ❯ ∈ V stent such that n E � ℓ i n E � ℓ i i · ˜ ω i ) ′ · ˜ � ✇ ′ dx 1 = � ˜ Q i H i ( Q i ) T ( ˜ ❢ ✈ dx 1 , ❱ ∈ V stent 0 0 i =1 i =1 (ˇ Cani´ c & Tambaˇ ca, IMA Journal of Applied Mathematics, 2012) L. Grubiˇ si´ c Constrained evolution 25.2.2019 15 / 49
1D stent model: properties for the forms n E � ℓ i n E � ℓ i i · ˜ ω i ) ′ · ˜ � ✇ ′ dx 1 , � ˜ Q i H i ( Q i ) T ( ˜ ✈ i dx 1 , a ( ❯ , ❱ ) = f ( ❱ ) = ❢ 0 0 i =1 i =1 Problem (W) Find ❯ ∈ V stent such that ❱ ∈ V stent . a ( ❯ , ❱ ) = f ( ❱ ) , L. Grubiˇ si´ c Constrained evolution 25.2.2019 16 / 49
1D stent model: properties for the forms n E � ℓ i n E � ℓ i i · ˜ ω i ) ′ · ˜ � ✇ ′ dx 1 , � ˜ Q i H i ( Q i ) T ( ˜ ✈ i dx 1 , a ( ❯ , ❱ ) = f ( ❱ ) = ❢ 0 0 i =1 i =1 Problem (W) Find ❯ ∈ V stent such that ❱ ∈ V stent . a ( ❯ , ❱ ) = f ( ❱ ) , V stent is a Hilbert space ( b is continuous) a is V stent -elliptic f is continuous on V stent L. Grubiˇ si´ c Constrained evolution 25.2.2019 16 / 49
1D stent model: properties for the forms n E � ℓ i n E � ℓ i i · ˜ ω i ) ′ · ˜ � ✇ ′ dx 1 , � ˜ Q i H i ( Q i ) T ( ˜ ✈ i dx 1 , a ( ❯ , ❱ ) = f ( ❱ ) = ❢ 0 0 i =1 i =1 Problem (W) Find ❯ ∈ V stent such that ❱ ∈ V stent . a ( ❯ , ❱ ) = f ( ❱ ) , V stent is a Hilbert space ( b is continuous) a is V stent -elliptic f is continuous on V stent Lax-Milgram implies Theorem (form a is V stent -elliptic) There exits a unique solution of Problem ( W ). L. Grubiˇ si´ c Constrained evolution 25.2.2019 16 / 49
❱ P ♣ ✈ t ✇ ✈ ✇ P ♣ ♣ ❱ ❱ 1D stent model: a look into constraints Problem: to construct functions within V stent ! ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } , N L. Grubiˇ si´ c Constrained evolution 25.2.2019 17 / 49
P ♣ ♣ ❱ ❱ 1D stent model: a look into constraints Problem: to construct functions within V stent ! ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } , N � ℓ i n E ✈ i ′ + t i × ˜ ♣ i · ( ˜ � ✇ i ) dx 1 b ( ❱ , P ) := ˜ 0 i =1 � ℓ i � ℓ i n E n E � ✈ i dx 1 + β · � ✇ i dx 1 , + α · ˜ ˜ 0 0 i =1 i =1 L. Grubiˇ si´ c Constrained evolution 25.2.2019 17 / 49
1D stent model: a look into constraints Problem: to construct functions within V stent ! ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } , N � ℓ i n E ✈ i ′ + t i × ˜ ♣ i · ( ˜ � ✇ i ) dx 1 b ( ❱ , P ) := ˜ 0 i =1 � ℓ i � ℓ i n E n E � ✈ i dx 1 + β · � ✇ i dx 1 , + α · ˜ ˜ 0 0 i =1 i =1 ♣ 1 , . . . , ˜ ♣ n E , α , β ) , P = ( ˜ n E M := L 2 ( N ; R 3 ) × R 3 × R 3 = L 2 (0 , ℓ i ; R 3 ) × R 3 × R 3 � i =1 Then V stent = { ❱ ∈ H 1 ( N ; R 6 ) : b ( ❱ , Θ ) = 0 , ∀ Θ ∈ M } . L. Grubiˇ si´ c Constrained evolution 25.2.2019 17 / 49
1D stent model: a look into constraints Problem: to construct functions within V stent ! ✈ i ′ + t i × ˜ � ✇ i = 0 , i = 1 , . . . , n E , V stent = { ❱ ∈ H 1 ( N ; R 6 ) : ˜ ❱ = 0 } , N � ℓ i n E ✈ i ′ + t i × ˜ ♣ i · ( ˜ � ✇ i ) dx 1 b ( ❱ , P ) := ˜ 0 i =1 � ℓ i � ℓ i n E n E � ✈ i dx 1 + β · � ✇ i dx 1 , + α · ˜ ˜ 0 0 i =1 i =1 ♣ 1 , . . . , ˜ ♣ n E , α , β ) , P = ( ˜ n E M := L 2 ( N ; R 3 ) × R 3 × R 3 = L 2 (0 , ℓ i ; R 3 ) × R 3 × R 3 � i =1 Then V stent = { ❱ ∈ H 1 ( N ; R 6 ) : b ( ❱ , Θ ) = 0 , ∀ Θ ∈ M } . Solution: mixed formulation L. Grubiˇ si´ c Constrained evolution 25.2.2019 17 / 49
❱ ❱ ❱ Mixed formulation Problem (M) Find ( ❯ , P ) ∈ H 1 ( N ; R 6 ) × M such that ❱ ∈ H 1 ( N ; R 6 ) , a ( ❯ , ❱ ) + b ( ❱ , P ) = f ( ❱ ) , b ( ❯ , Θ ) = 0 , Θ ∈ M . L. Grubiˇ si´ c Constrained evolution 25.2.2019 18 / 49
Mixed formulation Problem (M) Find ( ❯ , P ) ∈ H 1 ( N ; R 6 ) × M such that ❱ ∈ H 1 ( N ; R 6 ) , a ( ❯ , ❱ ) + b ( ❱ , P ) = f ( ❱ ) , b ( ❯ , Θ ) = 0 , Θ ∈ M . Theorem If b satisfies the inf-sup condition: b ( ❱ , Θ ) inf sup � ❱ � H 1 ( N ; R 6 ) � Θ � L 2 ( N ; R 3 ) × R 3 × R 3 ≥ β > 0 Θ ∈ L 2 ( N ; R 3 ) × R 3 × R 3 ❱ ∈ H 1 ( N ; R 6 ) the Problem ( M ) has unique solution. Then the Problem ( W ) is equivalent to Problem ( M )! L. Grubiˇ si´ c Constrained evolution 25.2.2019 18 / 49
Alternatively – in the direct product space We will also consider direct product space formulation ⇛ Let linear algebra solver do the heavy lifting We build H 1 ( N ; R 6 ) by eliminating constraints ❱ i (( Φ i ) − 1 ( v )) = ❱ j (( Φ j ) − 1 ( v )) Alternative introduce new variables and extend the restriction form. We then we get V = L 2 ( N ; R 3 ) × L 2 ( N ; R 3 ) × R 3 n E × R 3 n E × R 3 n E × R 3 n E × R 3 × R 3 , H 1 ( N ; R 3 ) × R 3 n V × R 3 n V . M = L 2 H 1 ( N ; R 3 ) × L 2 Projection by interpolation theory will be easier, since this is just a large product space We pay by considerably increasing the dimension of the problem – is it to expensive? L. Grubiˇ si´ c Constrained evolution 25.2.2019 19 / 49
Recall L. Grubiˇ si´ c Constrained evolution 25.2.2019 20 / 49
inf–sup for stents Lemma All stents in class S satisfy inf – sup condition. Class S contains: stents with all curved struts stents with straight struts which are linearly independent in all vertices they meet. ca, ˇ Proof, essentially LA (Grubiˇ si´ c, Ivekovi´ c, Tambaˇ Zugec, Rad HAZU, 2017) Proof for the V space formulation (Grubiˇ si´ c, Ljulj, Mehrmann, Tambaˇ ca, 2018) Direct product space formulation adds additional constraints (continuity at vertices of displacements and couples) L. Grubiˇ si´ c Constrained evolution 25.2.2019 21 / 49
❯ P ❯ ❯ ❱ ❱ ❯ ❱ ❱ ❱ FEM for mixed formulation Let us take finite dimensional subspaces V h ⊂ H 1 ( N ; R 6 ) , M h ⊂ M . Problem (M h ) Find ( ❯ h , P h ) ∈ V h × M h such that ❱ h ∈ V h , a ( ❯ h , ❱ h ) + b ( ❱ h , P h ) = f ( ❱ h ) , Θ h ∈ M h . b ( ❯ h , Θ h ) = 0 , L. Grubiˇ si´ c Constrained evolution 25.2.2019 22 / 49
FEM for mixed formulation Let us take finite dimensional subspaces V h ⊂ H 1 ( N ; R 6 ) , M h ⊂ M . Problem (M h ) Find ( ❯ h , P h ) ∈ V h × M h such that ❱ h ∈ V h , a ( ❯ h , ❱ h ) + b ( ❱ h , P h ) = f ( ❱ h ) , Θ h ∈ M h . b ( ❯ h , Θ h ) = 0 , If ( ❯ h , P h ) solves Problem (M h ) then ❯ h solves weak forulation Problem (W h ) Find ❯ h ∈ V h stent = { ❱ h ∈ V h : b ( ❱ h , Θ h ) = 0 , Θ h ∈ M h } such that ❱ h ∈ V h a ( ❯ h , ❱ h ) = f ( ❱ h ) , stent . L. Grubiˇ si´ c Constrained evolution 25.2.2019 22 / 49
Geometry matters! L. Grubiˇ si´ c Constrained evolution 25.2.2019 23 / 49
✉ ❯ Existence for ❯ h Note: V h stent �⊂ V stent L. Grubiˇ si´ c Constrained evolution 25.2.2019 24 / 49
✉ ❯ Existence for ❯ h Note: V h stent �⊂ V stent = ⇒ We can not use V stent –ellipticity of a L. Grubiˇ si´ c Constrained evolution 25.2.2019 24 / 49
✉ ❯ Existence for ❯ h Note: V h stent �⊂ V stent = ⇒ We can not use V stent –ellipticity of a Discretization: V h – piecewise polynomials of order n (denoted by P n ) M h – piecewise polynomials of order m Lemma The form a is V h stent –elliptic if and only if m ≥ n − 1 . L. Grubiˇ si´ c Constrained evolution 25.2.2019 24 / 49
❯ Existence for ❯ h Note: V h stent �⊂ V stent = ⇒ We can not use V stent –ellipticity of a Discretization: V h – piecewise polynomials of order n (denoted by P n ) M h – piecewise polynomials of order m Lemma The form a is V h stent –elliptic if and only if m ≥ n − 1 . i · ( ˜ i ∈ P m . � ℓ i ✉ i ) ′ = 0 , for all ˜ 0 ˜ Discrete inextensibility: θ θ L. Grubiˇ si´ c Constrained evolution 25.2.2019 24 / 49
Existence for ❯ h Note: V h stent �⊂ V stent = ⇒ We can not use V stent –ellipticity of a Discretization: V h – piecewise polynomials of order n (denoted by P n ) M h – piecewise polynomials of order m Lemma The form a is V h stent –elliptic if and only if m ≥ n − 1 . i · ( ˜ i ∈ P m . � ℓ i ✉ i ) ′ = 0 , for all ˜ 0 ˜ Discrete inextensibility: θ θ Theorem If m ≥ n − 1 , ❯ h , exists. L. Grubiˇ si´ c Constrained evolution 25.2.2019 24 / 49
Existence for ❯ h Note: V h stent �⊂ V stent = ⇒ We can not use V stent –ellipticity of a Discretization: V h – piecewise polynomials of order n (denoted by P n ) M h – piecewise polynomials of order m Lemma The form a is V h stent –elliptic if and only if m ≥ n − 1 . i · ( ˜ i ∈ P m . � ℓ i ✉ i ) ′ = 0 , for all ˜ 0 ˜ Discrete inextensibility: θ θ Theorem If m ≥ n − 1 , ❯ h , exists. Remark We miss discrete inf-sup for the formulation in H 1 ( N ; R 6 ) . However, for the direct product space formulation inf-sup follows readily! L. Grubiˇ si´ c Constrained evolution 25.2.2019 24 / 49
Note – compare with information science PDE graph models. Information science: ◮ Huge graph, but a scalar function ◮ “Finite difference” discretization Structural optimization: ◮ Highly structured graph, nodes of low incidence degree ◮ Constrained vector valued functions. ◮ FEM discretization L. Grubiˇ si´ c Constrained evolution 25.2.2019 25 / 49
❯ P ❯ ❯ ❯ ❯ ❯ ✉ t Convergence of FEM for stents introduce new vertices (with the same junction conditions) L. Grubiˇ si´ c Constrained evolution 25.2.2019 26 / 49
❯ P ❯ ❯ ❯ ❯ ❯ ✉ t Convergence of FEM for stents introduce new vertices (with the same junction conditions) the same problem with struts of length ≤ h L. Grubiˇ si´ c Constrained evolution 25.2.2019 26 / 49
❯ ❯ ❯ ❯ ❯ ✉ t Convergence of FEM for stents introduce new vertices (with the same junction conditions) the same problem with struts of length ≤ h we use P 2 approximation for ❯ h and P 1 for P h L. Grubiˇ si´ c Constrained evolution 25.2.2019 26 / 49
❯ ❯ ❯ ❯ ❯ ✉ t Convergence of FEM for stents introduce new vertices (with the same junction conditions) the same problem with struts of length ≤ h we use P 2 approximation for ❯ h and P 1 for P h The error estimate is based on the interpolation estimate for interpolation operators I 2 and I 1 L. Grubiˇ si´ c Constrained evolution 25.2.2019 26 / 49
❯ ❯ ❯ ❯ ❯ ✉ t Convergence of FEM for stents introduce new vertices (with the same junction conditions) the same problem with struts of length ≤ h we use P 2 approximation for ❯ h and P 1 for P h The error estimate is based on the interpolation estimate for interpolation operators I 2 and I 1 interpolation is strut by strut (this simplifies analysis) L. Grubiˇ si´ c Constrained evolution 25.2.2019 26 / 49
Convergence of FEM for stents introduce new vertices (with the same junction conditions) the same problem with struts of length ≤ h we use P 2 approximation for ❯ h and P 1 for P h The error estimate is based on the interpolation estimate for interpolation operators I 2 and I 1 interpolation is strut by strut (this simplifies analysis) I 2 : V stent → V h stent is defined by I 2 ❯ | e ∈ P 2 , ( I 2 ❯ ) | e i (0) = ❯ | e i (0) , ( I 2 ❯ ) | e i (0) = ❯ | e i ( ℓ ) , and discrete inextensibility � ℓ i i · (( ˜ i ∈ P 1 . ✉ i ) ′ + t i × ˜ ˜ ˜ ω i ) dx 1 = 0 , θ θ 0 L. Grubiˇ si´ c Constrained evolution 25.2.2019 26 / 49
Convergence of FEM for stents introduce new vertices (with the same junction conditions) the same problem with struts of length ≤ h we use P 2 approximation for ❯ h and P 1 for P h The error estimate is based on the interpolation estimate for interpolation operators I 2 and I 1 interpolation is strut by strut (this simplifies analysis) I 2 : V stent → V h stent is defined by I 2 ❯ | e ∈ P 2 , ( I 2 ❯ ) | e i (0) = ❯ | e i (0) , ( I 2 ❯ ) | e i (0) = ❯ | e i ( ℓ ) , and discrete inextensibility � ℓ i i · (( ˜ i ∈ P 1 . ✉ i ) ′ + t i × ˜ ˜ ˜ ω i ) dx 1 = 0 , θ θ 0 Note that full inextensibility poses to big restriction for the error estimate! L. Grubiˇ si´ c Constrained evolution 25.2.2019 26 / 49
❯ P ❯ P ❯ ❯ ❯ P Convergence of FEM for stents The interpolation satisfies the estimate � ❯ − I 2 ❯ � H 1 (0 ,ℓ i ; R 6 ) ≤ Ch 2 � ❯ ′′′ � L 2 (0 ,ℓ i ) . L. Grubiˇ si´ c Constrained evolution 25.2.2019 27 / 49
Convergence of FEM for stents The interpolation satisfies the estimate � ❯ − I 2 ❯ � H 1 (0 ,ℓ i ; R 6 ) ≤ Ch 2 � ❯ ′′′ � L 2 (0 ,ℓ i ) . Adapting an argument from Boffi, Brezzi and Gastaldi we obtain Theorem Let h > 0 denotes the size of the discretization mesh, ( ❯ , P ) is the solution of the mixed formulation and ( ❯ h , P h ) solution of the discretized problem piecewisely ( P 2 ) 6 × ( P 1 ) 3 polynomials. Then � ❯ − ❯ h � H 1 ( N ; R 6 ) ≤ Ch 2 ( � ❯ ′′′ � L 2 ( N ; R 6 ) + � P ′′ � L 2 ( N ; R 3 ) ) . no error estimate for multipliers! yields resolvent estimates for the spectral problem! (Grubiˇ si´ c, Tambaˇ ca, in review NLAA) L. Grubiˇ si´ c Constrained evolution 25.2.2019 27 / 49
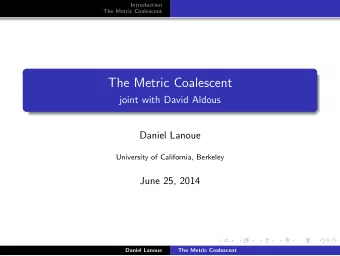
Numerical examples – convergence validate estimates −3 −3 x 10 x 10 2 2 1.5 1.5 1 1 0.5 0.5 0 0 −0.5 −0.5 −1 −1 −1.5 −1.5 −2 −2 0.02 −2 0.01 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 −1 0 1 0 2 −3 x 10 constant radial forcing −3 x 10 −3 x 10 3 3 2 2 1 1 0 0 −1 −1 −2 −2 0.02 −3 3 0.01 −3 2 1 0 −1 −2 −3 0 −5 5 0 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 −3 x 10 −3 x 10 x 2 1 radial forcing L. Grubiˇ si´ c Constrained evolution 25.2.2019 28 / 49
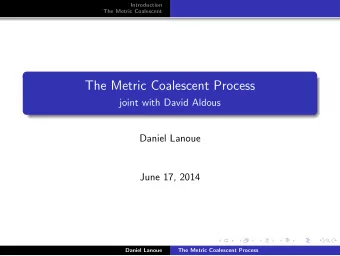
Numerical rate of convergence Rates of convergence 3.5 3 2.5 2 1.5 rate of H1 error for u rate of L2 error for n rate of L2 error for u 1 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 E ( h ) = Ch α for radial forcing depending as x 2 1 on the longitudinal variable. L. Grubiˇ si´ c Constrained evolution 25.2.2019 29 / 49
Numerical rate of convergence Rates of convergence 3.5 3 2.5 2 1.5 rate of H1 error for u rate of L2 error for n rate of L2 error for u 1 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 E ( h ) = Ch α for radial forcing depending as x 2 1 on the longitudinal variable. numerical approximations for 2, 4, 8, 16, 32, 64 division of struts are compared with solution for 128 divisions of every strut. L 2 errors are one order better then H 1 . coincide with theoretical estimates. L. Grubiˇ si´ c Constrained evolution 25.2.2019 29 / 49
A paradox! in H 1 ( N ) direct product for. splitting # time(s) size of matrix time(s) size of matrix 8 22 105198 2 38958 16 47 211182 42 78702 32 108 423150 152 158190 64 288 847086 629 317166 128 903 1694958 4183 635118 Tablica: Times and matrix sizes for the old and new numerical scheme L. Grubiˇ si´ c Constrained evolution 25.2.2019 30 / 49
❯ ❱ ✉ ✈ ❯ ❯ ❱ ❯ ❱ ❱ ❱ Evolution problem i = ρ i A i ∂ tt ˜ ♣ i ′ + ˜ ✉ i , ˜ ❢ q i ′ + t i × ˜ ♣ i = 0 , ˜ i = 1 , . . . , n E + junction conditions ω i ′ + Q i H i ( Q i ) T ˜ q i = 0 , ˜ ✉ i ′ + t i × ˜ ω i = θ i , ˜ L. Grubiˇ si´ c Constrained evolution 25.2.2019 31 / 49
Evolution problem i = ρ i A i ∂ tt ˜ ♣ i ′ + ˜ ✉ i , ˜ ❢ q i ′ + t i × ˜ ♣ i = 0 , ˜ i = 1 , . . . , n E + junction conditions ω i ′ + Q i H i ( Q i ) T ˜ q i = 0 , ˜ ✉ i ′ + t i × ˜ ω i = θ i , ˜ Let (limit of 3D linearized Antman-Cosserat model) � ℓ i n E ✉ i · ˜ � ρ i A i ✈ i dx 1 , m ( ❯ , ❱ ) = ˜ 0 i =1 Problem (EvoP) Find ❯ ∈ L 2 (0 , T ; V stent ) such that ∂ tt m ( ❯ , ❱ ) + a ( ❯ , ❱ ) = f ( ❱ ) , ❱ ∈ V stent . L. Grubiˇ si´ c Constrained evolution 25.2.2019 31 / 49
❯ ❯ ❯ ❱ ❱ ❯ ❱ ❱ ❯ Eigenvalue problem Problem (EigP) Find ( λ, ❯ ) ∈ R × V stent , ❯ � = 0 such that a ( ❯ , ❱ ) = λ 2 m ( ❯ , ❱ ) , ❱ ∈ V stent . L. Grubiˇ si´ c Constrained evolution 25.2.2019 32 / 49
Eigenvalue problem Problem (EigP) Find ( λ, ❯ ) ∈ R × V stent , ❯ � = 0 such that a ( ❯ , ❱ ) = λ 2 m ( ❯ , ❱ ) , ❱ ∈ V stent . Problem (EigQ) Find ( λ, ( ❯ , Ξ )) ∈ R × ( H 1 ( N ; R 6 ) × L 2 ( N ; R 3 ) × R 3 × R 3 ) , ( ❯ , Ξ ) � = 0 such that a ( ❯ , ❱ ) + b ( ❱ , Ξ ) = λ 2 m ( ❯ , ❱ ) , ❱ ∈ H 1 ( N ; R 6 ) , Θ ∈ L 2 ( N ; R 3 ) × R 3 × R 3 . b ( ❯ , Θ ) = 0 , ⇛ continuous inf − sup condition guarantees that the resolvent set is nonempty L. Grubiˇ si´ c Constrained evolution 25.2.2019 32 / 49
Convergence theory by Boffi–Brezzi–Marini Recall solution operators T : H → Dom( a ) and S : H → Dom( B ), ❱ ∈ Dom( a ) , a ( T ❢ , ❱ ) + b ( S ❢ , ❱ ) = ( ❢ , ❱ ) , (1) Θ ∈ Dom( B ∗ ) . b ( Θ , T ❢ ) = 0 , L. Grubiˇ si´ c Constrained evolution 25.2.2019 33 / 49
Convergence theory by Boffi–Brezzi–Marini Recall solution operators T : H → Dom( a ) and S : H → Dom( B ), ❱ ∈ Dom( a ) , a ( T ❢ , ❱ ) + b ( S ❢ , ❱ ) = ( ❢ , ❱ ) , (1) Θ ∈ Dom( B ∗ ) . b ( Θ , T ❢ ) = 0 , ⇛ Bounded compact operators T h norm converge to T . L. Grubiˇ si´ c Constrained evolution 25.2.2019 33 / 49
Convergence theory by Boffi–Brezzi–Marini Recall solution operators T : H → Dom( a ) and S : H → Dom( B ), ❱ ∈ Dom( a ) , a ( T ❢ , ❱ ) + b ( S ❢ , ❱ ) = ( ❢ , ❱ ) , (1) Θ ∈ Dom( B ∗ ) . b ( Θ , T ❢ ) = 0 , ⇛ Bounded compact operators T h norm converge to T . ⇛ If the resolvent is converging somewhere – say at z = 0 –then it converges for every z in resolvent set ρ ( T ) = C \ Spec( T ). L. Grubiˇ si´ c Constrained evolution 25.2.2019 33 / 49
Convergence theory by Boffi–Brezzi–Marini Recall solution operators T : H → Dom( a ) and S : H → Dom( B ), ❱ ∈ Dom( a ) , a ( T ❢ , ❱ ) + b ( S ❢ , ❱ ) = ( ❢ , ❱ ) , (1) Θ ∈ Dom( B ∗ ) . b ( Θ , T ❢ ) = 0 , ⇛ Bounded compact operators T h norm converge to T . ⇛ If the resolvent is converging somewhere – say at z = 0 –then it converges for every z in resolvent set ρ ( T ) = C \ Spec( T ). ⇛ Analogous definition of T h . L. Grubiˇ si´ c Constrained evolution 25.2.2019 33 / 49
Convergence rate – comments ⇛ Let λ , u and λ h and u h be eigenvalues and eigenvectors from V h ⇛ Then | λ − λ h | ≤ C � T − T h � Dom( a ) = O ( I − I 2 ) = O ( h 2 ) � ❯ − ❯ h � Dom( a ) ≤ C � T − T h � Dom( a ) = O ( I − I 2 ) = O ( h 2 ) . eigenfuction c.rate optimal, eigenvalue c.rate not. ⇛ If S h exists, then | λ − λ h | ≤ C � T − T h � Dom( a ) � S − S h � . ⇛ λ h is not a Ritz value of the solution operator T . L. Grubiˇ si´ c Constrained evolution 25.2.2019 34 / 49
Convergence rate – comments ⇛ Let λ , u and λ h and u h be eigenvalues and eigenvectors from V h ⇛ Then | λ − λ h | ≤ C � T − T h � Dom( a ) = O ( I − I 2 ) = O ( h 2 ) � ❯ − ❯ h � Dom( a ) ≤ C � T − T h � Dom( a ) = O ( I − I 2 ) = O ( h 2 ) . eigenfuction c.rate optimal, eigenvalue c.rate not. ⇛ If S h exists, then | λ − λ h | ≤ C � T − T h � Dom( a ) � S − S h � . ⇛ λ h is not a Ritz value of the solution operator T . ⇛ Note that here we also have the “singular mass” operator, and so we are actually studying the convergence of T h M h ! L. Grubiˇ si´ c Constrained evolution 25.2.2019 34 / 49
Structure recapitulation ⇛ Jordan structure as a consequence of algebraic constraints. Lemma Consider (EigQ) and let ( E , K ) be its block operator matrix representation. Then there exists a nonsingular V with the property that 0 ③ 1 ˆ 0 ˆ ③ 2 V ∗ EV = V − 1 ③ = ˆ E = 0 ③ 3 ˆ , M ˆ ③ 4 0 ˆ ③ 5 ˆ B T 0 0 0 0 0 51 ˆ ˆ B T 0 A 22 0 0 0 42 V ∗ KV = V ∗ ❋ = ˆ ˆ K = 0 0 0 A 33 0 0 , ˆ ˆ 0 B 42 0 0 0 ❋ 4 0 ˆ B 51 0 0 0 0 where ˆ A 33 = ˆ 33 , ˆ B 42 , and ˆ B 51 are invertible, and ˆ A T ❋ 4 = ❋ 3 . L. Grubiˇ si´ c Constrained evolution 25.2.2019 35 / 49
Recapitulation Sobolev spaces on graphs – nice review by O. Post Good interpolation operators for lower order spaces – hard because of the contact conditions in junctions! Geometry of the graph plays a role. for second order problems see Arioli and Benzi 2015. The interplay of geometry and constraints Doing interpolation on each edge and then assembling into a graph sometimes fails. L. Grubiˇ si´ c Constrained evolution 25.2.2019 36 / 49
Verification of the 1D model Compare 1D and 3D solutions (jointly with K. Schmidt and A. Semin) geometry discretization L. Grubiˇ si´ c Constrained evolution 25.2.2019 37 / 49
Verification of the 1D model – COMSOL, CONCEPTS similar phenomena Problems with thin geometries ◮ switch to compiled code in CONCEPTS (K.Schmidt) Error between 1D reduced model and CONCEPTS 3D model is 2% . L. Grubiˇ si´ c Constrained evolution 25.2.2019 38 / 49
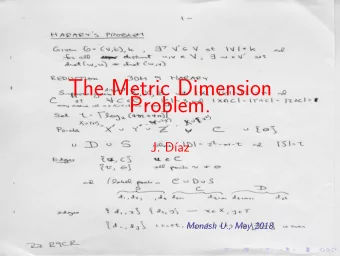
Examples of eigenproblem for 1D stent model Four stent meshes considered (similar to Palmaz, Express; Cypher and Xience by Cordis) −3 −3 x 10 x 10 1.5 1.5 1 1 0.5 0.5 0 0 −0.5 −0.5 −1 −1 0.02 −1.5 0.02 0.015 −1.5 2 2 1 0.01 0.01 1 0 0 0.005 −3 −1 x 10 −3 −1 0 x 10 0 −2 −2 −3 −3 x 10 x 10 1.5 1.5 1 1 0.5 0.5 0 0 −0.5 −0.5 −1 −1 0.02 0.02 −1.5 0.015 2 −1.5 1 0.01 1.5 0.01 1 0 0.5 0.005 0 −3 x 10 −1 −0.5 −3 −1 −2 0 x 10 0 −1.5 L. Grubiˇ si´ c Constrained evolution 25.2.2019 39 / 49
Leading eigenvalues Palmaz Cypher Express Xience 1. 1.033 0.8894 0.06014 0.05488 2. 1.033 0.8895 0.06014 0.05488 3. 5.265 1.3683 0.32504 0.28767 4. 7.499 3.5328 0.33972 0.32201 5. 7.499 3.5329 0.33973 0.32201 6. 11.329 3.6604 0.58740 0.58038 L. Grubiˇ si´ c Constrained evolution 25.2.2019 40 / 49
Palmaz −3 −3 x 10 x 10 3 3 2 2 1 1 0 0 −1 −1 −2 −2 −3 −3 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 −3 −3 x 10 x 10 1.5 3 1 2 0.5 1 0 0 −0.5 −1 −1 −2 −1.5 −3 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 −3 −3 x 10 x 10 3 2 2 1 1 0 0 −1 −1 −2 −3 −2 −5 0 5 10 15 20 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 −3 −3 x 10 x 10 L. Grubiˇ si´ c Constrained evolution 25.2.2019 41 / 49
Cypher −3 −3 x 10 x 10 3 3 2 2 1 1 0 0 −1 −1 −2 −2 −3 −3 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 −3 −3 x 10 x 10 2 3 2 1 1 0 0 −1 −1 −2 −2 −3 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 −5 0 5 10 15 20 −3 x 10 −3 −3 x 10 x 10 3 1.5 2 1 1 0.5 0 0 −1 −0.5 −2 −1 −3 −1.5 −5 0 5 10 15 20 −4 −3 −2 −1 0 1 2 3 4 −3 −3 x 10 x 10 L. Grubiˇ si´ c Constrained evolution 25.2.2019 42 / 49
Express −3 −3 x 10 x 10 3 3 2 2 1 1 0 0 −1 −1 −2 −2 −3 −3 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 −3 −3 x 10 x 10 2 3 2 1 1 0 0 −1 −1 −2 −2 −3 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 −3 −3 x 10 x 10 3 2 2 1 1 0 0 −1 −1 −2 −3 −2 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 L. Grubiˇ si´ c Constrained evolution 25.2.2019 43 / 49
Xience −3 −3 x 10 x 10 3 3 2 2 1 1 0 0 −1 −1 −2 −2 −3 −3 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 −3 −3 x 10 x 10 2 3 2 1 1 0 0 −1 −1 −2 −2 −3 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 −3 −3 x 10 x 10 3 2 2 1 1 0 0 −1 −1 −2 −3 −2 −5 0 5 10 15 20 −5 0 5 10 15 20 −3 −3 x 10 x 10 L. Grubiˇ si´ c Constrained evolution 25.2.2019 44 / 49
Convergence rates L. Grubiˇ si´ c Constrained evolution 25.2.2019 45 / 49
Evolution problems Structure of the pencil 0 is in the resolvent set Problem is index 2 ( ∞ eigenvalue has Jordan chain of length 2) Imaginary eigenvalues are semisimple use deflation and exponential integrators, or backward differentiation schemes like BDF-2, or Volker’s favorite Radau2a. L. Grubiˇ si´ c Constrained evolution 25.2.2019 46 / 49
Evolution problems Structure of the pencil 0 is in the resolvent set Problem is index 2 ( ∞ eigenvalue has Jordan chain of length 2) Imaginary eigenvalues are semisimple use deflation and exponential integrators, or backward differentiation schemes like BDF-2, or Volker’s favorite Radau2a. ⇛ Perhaps another time in more detail :) Work so far Grubiˇ si´ c, Tambaˇ ca, Quasi-semidefinite eigenvalue problem and applications. Nanosystems: Physics, Chemistry, Mathematics, 2017 Christian Mehl, Volker Mehrmann, Michal Wojtylak, Linear algebra properties of dissipative Hamiltonian descriptor systems, ArXiv.org, 2018 Luka Grubiˇ si´ c, Matko Ljulj, Volker Mehrmann, Josip Tambaˇ ca, Modeling and discretization methods for the numerical simulation of elastic stents, ArXiv.org, 2018 L. Grubiˇ si´ c Constrained evolution 25.2.2019 46 / 49
Evolution problems Structure of the pencil 0 is in the resolvent set Problem is index 2 ( ∞ eigenvalue has Jordan chain of length 2) Imaginary eigenvalues are semisimple use deflation and exponential integrators, or backward differentiation schemes like BDF-2, or Volker’s favorite Radau2a. ⇛ Perhaps another time in more detail :) Work so far Grubiˇ si´ c, Tambaˇ ca, Quasi-semidefinite eigenvalue problem and applications. Nanosystems: Physics, Chemistry, Mathematics, 2017 Christian Mehl, Volker Mehrmann, Michal Wojtylak, Linear algebra properties of dissipative Hamiltonian descriptor systems, ArXiv.org, 2018 Luka Grubiˇ si´ c, Matko Ljulj, Volker Mehrmann, Josip Tambaˇ ca, Modeling and discretization methods for the numerical simulation of elastic stents, ArXiv.org, 2018 ⇛ For the “heat” equation also see Emmrich and Mehrmann L. Grubiˇ si´ c Constrained evolution 25.2.2019 46 / 49
Evolution problems Structure of the pencil 0 is in the resolvent set Problem is index 2 ( ∞ eigenvalue has Jordan chain of length 2) Imaginary eigenvalues are semisimple use deflation and exponential integrators, or backward differentiation schemes like BDF-2, or Volker’s favorite Radau2a. ⇛ Perhaps another time in more detail :) Work so far Grubiˇ si´ c, Tambaˇ ca, Quasi-semidefinite eigenvalue problem and applications. Nanosystems: Physics, Chemistry, Mathematics, 2017 Christian Mehl, Volker Mehrmann, Michal Wojtylak, Linear algebra properties of dissipative Hamiltonian descriptor systems, ArXiv.org, 2018 Luka Grubiˇ si´ c, Matko Ljulj, Volker Mehrmann, Josip Tambaˇ ca, Modeling and discretization methods for the numerical simulation of elastic stents, ArXiv.org, 2018 ⇛ For the “heat” equation also see Emmrich and Mehrmann L. Grubiˇ si´ c Constrained evolution 25.2.2019 46 / 49
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.