Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.”
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean.
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out.
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space.
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) .
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) .
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) . A · x = 0, with probability ( 1 / 2 ) r if r rows.
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) . A · x = 0, with probability ( 1 / 2 ) r if r rows. � n � There are < X = 2 vectors x with fewer than k zeros. k
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) . A · x = 0, with probability ( 1 / 2 ) r if r rows. � n � There are < X = 2 vectors x with fewer than k zeros. k � n ) = Θ( k log n � If r > log ( 2 k ) , plus union bound. k
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) . A · x = 0, with probability ( 1 / 2 ) r if r rows. � n � There are < X = 2 vectors x with fewer than k zeros. k � n ) = Θ( k log n � If r > log ( 2 k ) , plus union bound. k = ⇒ Ax � = 0 for all vectors that are k -sparse.
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) . A · x = 0, with probability ( 1 / 2 ) r if r rows. � n � There are < X = 2 vectors x with fewer than k zeros. k � n ) = Θ( k log n � If r > log ( 2 k ) , plus union bound. k = ⇒ Ax � = 0 for all vectors that are k -sparse.
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) . A · x = 0, with probability ( 1 / 2 ) r if r rows. � n � There are < X = 2 vectors x with fewer than k zeros. k � n ) = Θ( k log n � If r > log ( 2 k ) , plus union bound. k = ⇒ Ax � = 0 for all vectors that are k -sparse. That is, random A has no sparse vectors in null-space.
Almost Euclidean Nullspace. Theorem: For a random ± 1, d × n matrix A , and for any x in ker ( A ) some d = Ω( k log n k ) rows, has for any T ⊂ [ n ] that √ 1 � x � 2 < 16 k � x � 1 . ( ∗ ) √ Intuition: “Mass in x is spread out over k entries.” The nullspace of A , is almost euclidean. Typical vectors are spread out: every vector is kind of spread out. The ℓ 1 ball is closer to scaling of ℓ 2 ball for vectors in the null-space. Idea: Consider random r × n matrix A over GF ( 2 ) . For a vector x in GF ( 2 ) . A · x = 0, with probability ( 1 / 2 ) r if r rows. � n � There are < X = 2 vectors x with fewer than k zeros. k � n ) = Θ( k log n � If r > log ( 2 k ) , plus union bound. k = ⇒ Ax � = 0 for all vectors that are k -sparse. That is, random A has no sparse vectors in null-space. Note: Parity check matrix of linear code!
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 .
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: � v T � 1 ≤
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: � � v T � 1 ≤ | T |� v T � 2
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: � � � v T � 1 ≤ | T |� v T � 2 ≤ | T |� v � 2
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: 1 � � � � v T � 1 ≤ | T |� v T � 2 ≤ | T |� v � 2 ≤ | T | 16 k � v � 1 √
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: 16 k � v � 1 < 1 1 � � � � v T � 1 ≤ | T |� v T � 2 ≤ | T |� v � 2 ≤ | T | 4 � v � 1 √
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: 16 k � v � 1 < 1 1 � � � � v T � 1 ≤ | T |� v T � 2 ≤ | T |� v � 2 ≤ | T | 4 � v � 1 √
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: 16 k � v � 1 < 1 1 � � � � v T � 1 ≤ | T |� v T � 2 ≤ | T |� v � 2 ≤ | T | 4 � v � 1 √ Intuition:
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: 16 k � v � 1 < 1 1 � � � � v T � 1 ≤ | T |� v T � 2 ≤ | T |� v � 2 ≤ | T | 4 � v � 1 √ Intuition: For any v ∈ ker ( A ) , the amount of mass in any small, k , set of coordinates is small, 1 4 v 1 .
Small projection onto small set of coordinates. 1 Consider A with property, x ∈ ker ( A ) , has � x � 2 < k � x � 1 . √ 16 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | < k , � v T � 1 < � v � 1 4 . Proof: 16 k � v � 1 < 1 1 � � � � v T � 1 ≤ | T |� v T � 2 ≤ | T |� v � 2 ≤ | T | 4 � v � 1 √ Intuition: For any v ∈ ker ( A ) , the amount of mass in any small, k , set of coordinates is small, 1 4 v 1 . Mass is spread out over more than k coordinates.
Optimum is correct! Want to find: k -sparse solution to Ax = b .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates.
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ?
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm.
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1 � v � ≥ � v T �−� v T �
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1 � v � ≥ � v T �−� v T � = ⇒
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1 � v � ≥ � v T �−� v T � = ⇒ ≥ � x T � 1 −� v T � 1 + � v T �
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1 � v � ≥ � v T �−� v T � = ⇒ ≥ � x T � 1 −� v T � 1 + � v T � ≥ � x T � 1 −� v T � 1 −� v T � 1 + � v � 1
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1 � v � ≥ � v T �−� v T � = ⇒ ≥ � x T � 1 −� v T � 1 + � v T � ≥ � x T � 1 −� v T � 1 −� v T � 1 + � v � 1 ≥ � x � 1 − 2 � v T � 1 + � v � 1
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1 � v � ≥ � v T �−� v T � = ⇒ ≥ � x T � 1 −� v T � 1 + � v T � ≥ � x T � 1 −� v T � 1 −� v T � 1 + � v � 1 ≥ � x � 1 − 2 � v T � 1 + � v � 1 > � x � 1 .
Optimum is correct! Want to find: k -sparse solution to Ax = b . Recall: minimize � w � 1 with Aw = b . Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k , � v T � 1 < � v � 1 4 . Idea: any nonzero vector, v ∈ ker ( A ) has small projection onto any k coordinates. Consider solution w . w = x + v where v ∈ ker ( A ) . Will prove: v = 0 or w = x . Contradiction ? Hmmm. Let T be non-zero coordinates of x . � w � 1 = � x + v � 1 = � x T + v T � 1 + � v T � 1 � v � ≥ � v T �−� v T � = ⇒ ≥ � x T � 1 −� v T � 1 + � v T � ≥ � x T � 1 −� v T � 1 −� v T � 1 + � v � 1 ≥ � x � 1 − 2 � v T � 1 + � v � 1 > � x � 1 . If v is nonzero.
Imperfect Case. What if x is mostly sparse?
Imperfect Case. What if x is mostly sparse? σ k ( x ) = supp ( z ) ≤ k � x − z � 1 min
Imperfect Case. What if x is mostly sparse? σ k ( x ) = supp ( z ) ≤ k � x − z � 1 min “Amount of x outside of k coordinates.”
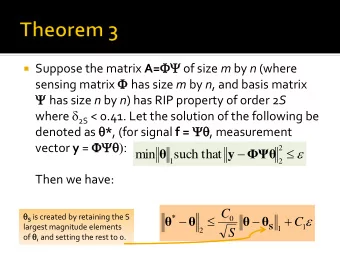
Imperfect Case. What if x is mostly sparse? σ k ( x ) = supp ( z ) ≤ k � x − z � 1 min “Amount of x outside of k coordinates.” 1 Theorem: If v ∈ ker ( A ) = ⇒ � v � 2 ≤ 16 k � v � 1 , then solution to min � w � 1 , Ax = b , has � x − w � 1 ≤ 4 σ k ( x ) .
Imperfect Case. What if x is mostly sparse? σ k ( x ) = supp ( z ) ≤ k � x − z � 1 min “Amount of x outside of k coordinates.” 1 Theorem: If v ∈ ker ( A ) = ⇒ � v � 2 ≤ 16 k � v � 1 , then solution to min � w � 1 , Ax = b , has � x − w � 1 ≤ 4 σ k ( x ) . Still have.
Imperfect Case. What if x is mostly sparse? σ k ( x ) = supp ( z ) ≤ k � x − z � 1 min “Amount of x outside of k coordinates.” 1 Theorem: If v ∈ ker ( A ) = ⇒ � v � 2 ≤ 16 k � v � 1 , then solution to min � w � 1 , Ax = b , has � x − w � 1 ≤ 4 σ k ( x ) . Still have. Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 16 , � v T � 1 < � v � 1 4 .
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 .
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 .
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x .
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w �
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w �
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1 ≤ � x � 1 .
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1 ≤ � x � 1 . � x − w � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � x � 1 −� w T � 1 .
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1 ≤ � x � 1 . � x − w � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � x � 1 −� w T � 1 . ( ∗ ) = 2 � x T � 1 + � x T �−� w T � 1
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1 ≤ � x � 1 . � x − w � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � x � 1 −� w T � 1 . ( ∗ ) = 2 � x T � 1 + � x T �−� w T � 1 ≤ 2 � x T � 1 + � x T − w T � 1
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1 ≤ � x � 1 . � x − w � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � x � 1 −� w T � 1 . ( ∗ ) = 2 � x T � 1 + � x T �−� w T � 1 ≤ 2 � x T � 1 + � x T − w T � 1 � x − w � 1 ≤ 2 � ( x − w ) T � 1 + 2 � x T � 1
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1 ≤ � x � 1 . � x − w � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � x � 1 −� w T � 1 . ( ∗ ) = 2 � x T � 1 + � x T �−� w T � 1 ≤ 2 � x T � 1 + � x T − w T � 1 � x − w � 1 ≤ 2 � ( x − w ) T � 1 + 2 � x T � 1 ≤ 2 � ( x − w ) � + 2 σ ( x ) 4
Proof of � w − x � ≤ 4 σ ( x ) . Again: σ k ( x ) = min supp ( z ) ≤ k | x − z | 1 . 16 , � v T � 1 < � v � 1 Lemma: For v ∈ ker ( A ) , T ⊂ [ n ] , | T | ≤ k 4 . Proof of Theorem: T be k largest in magnitude coordinates of x . � x − w � 1 = � ( x − w ) T � 1 + � ( x − w ) T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w T � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � w � 1 −� w T � 1 triangle inequality on � w � � w T � 1 = � w � 1 −� w T � 1 ≤ � x � 1 . � x − w � 1 ≤ � ( x − w ) T � 1 + � x T � 1 + � x � 1 −� w T � 1 . ( ∗ ) = 2 � x T � 1 + � x T �−� w T � 1 ≤ 2 � x T � 1 + � x T − w T � 1 � x − w � 1 ≤ 2 � ( x − w ) T � 1 + 2 � x T � 1 ≤ 2 � ( x − w ) � + 2 σ ( x ) 4
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries