
Competitive Online Routing Algorithms in Delaunay Triangulations - PowerPoint PPT Presentation
Competitive Online Routing Algorithms in Delaunay Triangulations Presented by Anders Lundgren and Agata Gruza Computing Dirichlet Tesselantions: Adrian Bowyer Computing the N-Dimensional Deluanay Tessellation with Application to Voronoi
Competitive Online Routing Algorithms in Delaunay Triangulations Presented by Anders Lundgren and Agata Gruza
Computing Dirichlet Tesselantions: Adrian Bowyer Computing the N-Dimensional Deluanay Tessellation with Application to Voronoi Polytopes: David Watson
Bowyer-Watson Iterative Deluanay Triangulation
Net Gain: 2 Triangles / Iteration O(n 2 ) : can be improved to O(n 1.5 )
II. New Memoryless Online Routing Algorithms for Delaunay Triangulations
Online routing algorithms - algorithms designed for the scenario where a packet/vehicle/robot only has local information available to find out its paths. The online routing algorithms are a special kind of geometric routing algorithms in which each node only stores the positions of its one-hop neighbors in its memory .
Properties of the memoryless online routing (MOR) algorithms: 1. low space overhead in packet headers 2. low complexity of routing computation at nodes 3. scalable to large networks because of using only local information to route packets 4. energy efficient because of having no global information exchange
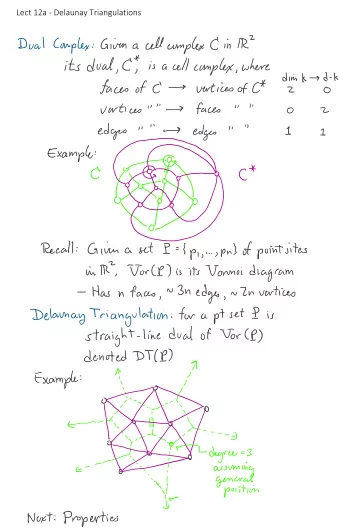
A Delaunay triangulation (DT) is a triangulation graph in which there is no node that lies in the interior of the circumcircle of any of its triangular faces
MOR algorithms: ● Two-step Routing ● Apex-angle Routing ● Midpoint Routing ● Compass Midpoint Routing (not implemented) Existing MOR algorithms that are already proved to work for DTs: ● Compass Routing ● Greedy Routing ● Greedy Compass
The Two-Step Routing Algorithm: Idea: minimize the sum of d(v,w) and d(w,t) , where w is a neighbor of v .
The Apex-Angle Routing Algorithm: Idea: maximize this apex angle in each routing step. It guarantees a packet reaching the destination in DTs.
The Midpoint Routing Algorithm: Idea: minimize the Euclidean distance to m , where m is the midpoint between the current forwarding node v and the destination t .
The Compass Midpoint Algorithm: ● a special case of the Deterministic Compass algorithms ● Idea: the forwarding node v first decides the two nodes cw(v) and ccw(v) , and then selects one of them as next (v) using a deterministic rule ● Any Deterministic Compass algorithm works for DTs.
Our contribution: Four Memoryless Online Routing Algorithms are compared between each other. Nodes are placed on the graph randomly. Our experimental results provide fundings on efficiency, average node cost and average path cost. ● Test latitude: 100 vertices ● Grid size: 600x600 ● Technology used: PHP 5.4.12, Apache 2.4.4, Vim 7.2, GD library, Windows 7 ● Source code: https://github.com/CruorVolt/OnlineRouting (the README file has updated information about how the program works)
Results:
Results:
Results:
Results:
Results:
Results:
Results:
Results:
Results:
Results:
Results:
Results: ● No upper bound exists for MOR algorithms ● The Two-step Routing and the Apex-angle Routing algorithms perform the best in Euclidean metric, so they are suitable for the scenarios such as robotics where reducing the Euclidean path length is the primary goal ● The Midpoint Routing and Compass Midpoint algorithms perform well in worst cases in both Euclidean and link metric, so they are suitable for the scenarios where unacceptable worst case performance is to be reduced
Future work: ● Improve and make a program more efficient: ○ Presorted Bowyer-Watson ○ Dijkstras Priority Queue ● Ability to import and save results in a text file ● Possibility of running more than two algorithms in the same time
References: ● http://www.izor.hr/web/guest/delaunaytriang - helpful for generation a test-triangulation ● E.White, J.Eisenhamer, “PHP 5 in Practice”, Sams Publishing, 2007 ● Bowyer, Adrian (1981). “Computing Drichlet Tessellations”. Comput. J. 24 (2): 162-166 ● Watson, David F. (1981). “Computing the n-dimensional Deluanay Tessellation with Application to Voronoi Polytopes.” Comput. J. 24 (2) 167-172. ● Dijkstra, E. W (1959). “A note on two problems in connexion with graphs”. Numerische Mathematic 1: 269-271.
QUESTIONS !
Recommend




![s w s = strong witness w = weak witness Theorem [de Silva 03] w ab b s w bc w abc](https://c.sambuz.com/980046/s-w-s.webp)
![Walking in Poisson Delaunay triangulations Olivier Devillers [D. & Hemsley, 2016] [Chenavier](https://c.sambuz.com/999070/walking-in-poisson-delaunay-triangulations-s.webp)
More recommend
Explore More Topics
Stay informed with curated content and fresh updates.