Classification of joint numerical ranges of three hermitian matrices of size three talk at The 14th Workshop on Numerical Ranges and Numerical Radii Max-Planck-Institute MPQ, München, Germany June 15th, 2018 speaker Stephan Weis Université libre de Bruxelles, Belgium joint work with nski and Karol ˙ Konrad Szyma´ Zyczkowski Jagiellonian University, Kraków, Poland
Overview 1. Introduction 2. Problems with 3D Joint Numerical Ranges of 3-by-3 Matrices 3. Solution: Graph Embedding (definition of classes) 4. Finding Examples (all classes are populated) 5. Conclusion
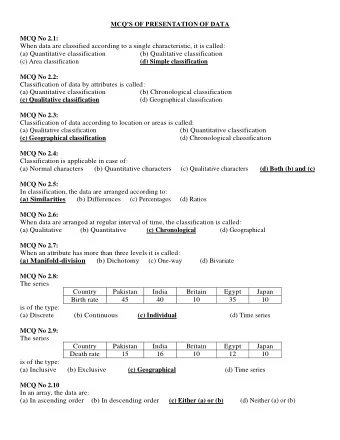
Introduction
Joint Numerical Ranges let F 1 ,..., F k ∈ M d denote hermitian d -by- d matrices, the state space (mixed states) of a *-subalgebra A ⊂ M d is M(A) = { ρ ∈ A ∣ ρ ⪰ 0 , tr ( ρ ) = 1 } , the joint algebraic numerical range of F = ( F 1 ,..., F k ) is L F = {( tr ( ρ F 1 ) ,..., tr ( ρ F k )) ∶ ρ ∈ M( M d )} ⊂ R k , the joint numerical range (JNR) of F is W F = {(⟨ ψ ∣ F 1 ψ ⟩ ,..., ⟨ ψ ∣ F k ψ ⟩) ∶ ∣ ψ ⟩ ∈ C d , ⟨ ψ ∣ ψ ⟩ = 1 } with ⟨ ϕ ∣ ψ ⟩ = ϕ 1 ψ 1 + ⋯ + ϕ d ψ d Lemma conv ( W F ) = L F .
Convexity of Numerical Ranges Theorem (Toeplitz and Hausdorff) W F 1 , F 2 is convex. Hence W F 1 , F 2 = L F 1 , F 2 . Math. Z. 2 (1918), 187 and Math. Z. 3 (1919), 314 Theorem (Au-Yeung and Poon) If d ≥ 3 then W F 1 , F 2 , F 3 is convex. Hence W F = L F . Southeast Asian Bull. Math. 3 (1979), 85 there is no easy rule to decide convexity of W F 1 ,..., F k if k ≥ 4 Li and Poon, SIAM J. Matrix Anal. Appl. 21 (2000), 668
Boundary Generating Curve ( k = 2 ) consider the hypersurface V F 1 , F 2 = {( u 0 ∶ u 1 ∶ u 2 ) ∈ P 2 C ∣ det ( u 0 1 + u 1 F 1 + u 2 F 2 ) = 0 } with d -by- d identity matrix 1 and its dual curve F 1 , F 2 ⊂ P 2 V ∗ ∗ C closure of the set of tangent lines at smooth points of V the boundary generating curve of F 1 , F 2 is F 1 , F 2 ( R ) = {( x 1 , x 2 ) ∈ R 2 ∣ ( 1 ∶ x 1 ∶ x 2 ) ∈ V ∗ F 1 , F 2 } ⊂ R 2 V ∗ Theorem (Kippenhahn) F 1 , F 2 ( R ) . W F 1 , F 2 is the convex hull of V ∗ Mathematische Nachr. 6 (1951), 193
Classification of Numerical Ranges ( k = 2) d = 2, the numerical range W F 1 , F 2 is an ellipse (possibly degenerate) d = 3, Kippenhahn (1951) derived a classification of W F 1 , F 2 from F 1 , F 2 ( R ) , the boundary generating curve V ∗ see also Keeler et al. LAA 252 (1997), 115 d = 4, Chien and Nakazato derived a classification of W F 1 , F 2 F 1 , F 2 ( R ) , Electronic J. Lin. Alg. 23 (2012), 755 from V ∗ Definition. 3-by-3 matrices F 1 ,..., F k are unitarily reducible (otherwise unitarily irreducible) if there is a unitary matrix U such that U ∗ F 1 U ,..., U ∗ F k U are of direct sum form ( 0 0 ∗ ) . ∗ ∗ 0 ∗ ∗ 0
Numerical Ranges, d = 3, Unitarily Reducible F 1 , F 2 ( R ) (blue) Drawings: boundary generating curves V ∗ F 1 , F 2 ( R ) consists of three points 1) V ∗ e.g. F 1 = ( 0 0 0 ) , F 2 = ( 0 0 1 ) 0 0 0 0 0 0 0 1 0 0 0 0 F 1 , F 2 ( R ) is the union of an ellipse and a point 2) V ∗ e.g. F 1 = ( 0 0 2 ) , F 2 = ( 0 0 0 ) 0 1 0 0 − i 0 1 0 0 i 0 0
Numerical Ranges, d = 3, Unitarily Reducible Drawings: boundaries of the numerical ranges W F 1 , F 2 (red) 1) W F 1 , F 2 is a triangle e.g. F 1 = ( 0 0 0 ) , F 2 = ( 0 0 1 ) 0 0 0 0 0 0 0 1 0 0 0 0 2) W F 1 , F 2 is the convex hull of an ellipse and a point e.g. F 1 = ( 0 0 2 ) , F 2 = ( 0 0 0 ) 0 1 0 0 − i 0 1 0 0 i 0 0
Numerical Ranges, d = 3, Unitarily Irreducible F 1 , F 2 ( R ) (blue) Drawings: boundary generating curves V ∗ F 1 , F 2 ( R ) is the union of an ellipse and a point inside 1) V ∗ e.g. F 1 = ⎛ ⎠ , F 2 = ⎛ ⎞ ⎞ 1 0 − i − i 0 1 2 2 ⎝ 0 − 1 ⎝ i ⎠ 1 i 0 2 2 2 − 1 1 2 − i i 1 0 2 2 F 1 , F 2 ( R ) is a quartic curve 2) V ∗ e.g. F 1 = ( 0 1 0 ) , F 2 = ( 0 0 − 1 ) 0 1 0 1 0 0 1 0 1 0 1 0 F 1 , F 2 ( R ) is a sextic curve 3) V ∗ 0 0 1 e.g. F 1 = ( ) , F 2 = ( 0 0 − 1 ) 1 0 0 2 0 0 1 0 0 0 1 2 1 0
Numerical Ranges, d = 3, Unitarily Irreducible Drawings: boundaries of the numerical ranges W F 1 , F 2 (red) 1) W F 1 , F 2 is an ellipse e.g. F 1 = ⎛ ⎠ , F 2 = ⎛ ⎞ ⎞ 1 0 − i − i 0 1 2 2 ⎝ 0 − 1 ⎝ i ⎠ 1 i 0 2 2 1 2 − 1 2 − i i 1 0 2 2 2) W F 1 , F 2 is the convex hull of a quartic curve e.g. F 1 = ( 0 1 0 ) , F 2 = ( 0 0 − 1 ) 0 1 0 1 0 0 1 0 1 0 1 0 3) W F 1 , F 2 is the convex hull of a sextic curve 0 0 1 e.g. F 1 = ( ) , F 2 = ( 0 0 − 1 ) 1 0 0 2 0 0 1 0 0 0 1 2 1 0
Problems with Three-Dimensional Joint Numerical Ranges
Boundary generating surface ( k = 3 ) consider the hypersurface V F 1 , F 2 , F 3 = { u ∈ P 3 C ∶ det ( u 0 1 + u 1 F 1 + ⋯ + u 3 F 3 ) = 0 } and its dual variety F 1 , F 2 , F 3 ⊂ P 3 V ∗ ∗ C closure of the set of tangent planes at smooth points of V the boundary generating surface of F 1 , F 2 , F 3 is F 1 , F 2 , F 3 ( R ) = { x ∈ R 3 ∣ ( 1 ∶ x 1 ∶ x 2 ∶ x 3 ) ∈ V ∗ F 1 , F 2 , F 3 } ⊂ R 2 V ∗ Observation (Chien and Nakazato, LAA 432 (2010), 173 ) F 1 , F 2 , F 3 ( R ) can contain lines, hence V ∗ F ( R ) ⊂ W F is V ∗ impossible and conv ( V ∗ F ( R )) = W F fails.
Example 1 F 1 = 1 2 ( 0 1 0 ) , F 2 = 1 2 ( 1 0 0 ) , F 3 = ( 0 0 1 ) 1 0 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 0 boundary generating surface F 1 , F 2 , F 3 ( R ) V ∗ = { x ∈ R 3 ∣ − 4 x 2 3 − 4 x 2 3 + 4 x 3 3 − 4 x 4 3 + 4 x 1 x 2 2 x 3 − x 4 2 = 0 } 1 x 2 2 x 2 Depicted surface: F 1 , F 2 , F 3 ( R ) with the Intersection of V ∗ boundary of W F 1 , F 2 , F 3
Example 1 F 1 = 1 2 ( 0 1 0 ) , F 2 = 1 2 ( 1 0 0 ) , F 3 = ( 0 0 1 ) 1 0 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 0 boundary generating surface F 1 , F 2 , F 3 ( R ) V ∗ = { x ∈ R 3 ∣ − 4 x 2 3 − 4 x 2 3 + 4 x 3 3 − 4 x 4 3 + 4 x 1 x 2 2 x 3 − x 4 2 = 0 } 1 x 2 2 x 2 F 1 , F 2 , F 3 ( R ) the x 1 -axis lies in V ∗
Example 2 F 1 = ( 0 0 1 ) , F 2 = 1 2 ( 0 0 0 ) , F 3 = 1 2 ( 1 0 0 ) 0 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 0 0 boundary generating surface F 1 , F 2 , F 3 ( R ) = { x ∈ R 3 ∣ − x 2 2 + x 1 x 2 3 − x 2 3 − x 4 3 = 0 } V ∗ 1 x 2 1 x 2 Depicted surface: F 1 , F 2 , F 3 ( R ) Intersection of V ∗ with the boundary of W F 1 , F 2 , F 3
Example 2 F 1 = ( 0 0 1 ) , F 2 = 1 2 ( 0 0 0 ) , F 3 = 1 2 ( 1 0 0 ) 0 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 0 0 boundary generating surface F 1 , F 2 , F 3 ( R ) = { x ∈ R 3 ∣ − x 2 2 + x 1 x 2 3 − x 2 3 − x 4 3 = 0 } V ∗ 1 x 2 1 x 2 the x 1 - and x 2 -axes F 1 , F 2 , F 3 ( R ) lie in V ∗
Example 3 F 1 = 1 2 ( 0 0 0 ) , F 2 = 1 2 ( 1 0 0 ) , F 3 = 1 2 ( 0 1 0 ) 0 1 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 1 boundary generating surface = Roman surface F 1 , F 2 , F 3 ( R ) = { x ∈ R 3 ∣ x 1 x 2 x 3 − x 2 2 − x 2 3 − x 2 3 = 0 } V ∗ 1 x 2 1 x 2 2 x 2 Depicted surface: F 1 , F 2 , F 3 ( R ) Intersection of V ∗ with the boundary of W F 1 , F 2 , F 3
Example 3 F 1 = 1 2 ( 0 0 0 ) , F 2 = 1 2 ( 1 0 0 ) , F 3 = 1 2 ( 0 1 0 ) 0 1 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 1 boundary generating surface = Roman surface F 1 , F 2 , F 3 ( R ) = { x ∈ R 3 ∣ x 1 x 2 x 3 − x 2 2 − x 2 3 − x 2 3 = 0 } V ∗ 1 x 2 1 x 2 2 x 2 all three coordinate axes F 1 , F 2 , F 3 ( R ) lie in V ∗
Classification of JNRs: State of the Art Kippenhahn’s assertion does not generalize from k = 2 to k = 3, an algebraic geometry approach seems unavailable ! very little is known about W F = W F 1 ,..., F k , k ≥ 3, except for • corner points (conical points) imply F unitarily reducible Binding and Li, LAA 151 (1991), 157 • ovals and reconstruction of F from W F Krupnik and Spitkovsky, LAA 419 (2006), 569 • a maximum of 4 ellipses on the boundary of W F if k = d = 3 Chien and Nakazato, LAA 430 (2009), 204 Our Approach: Study configurations of exposed faces on the boundary of W F .
Solution: Graph Embedding
Exposed Faces an exposed face of a convex set C ⊂ R n is the set of maximizers of a linear functional, F C ( u ) = argmax {⟨ x , u ⟩ ∶ x ∈ C } , u ∈ R n , or the empty set; let F ( u ) = u 1 F 1 + ⋯ + u k F k , u ∈ R k , and E ∶ M ( M d ) → W F , ρ ↦ ( tr ( ρ F 1 ) ,..., tr ( ρ F k )) ; then E − 1 ( F W F ( u )) = F M( M d ) ( F ( u )) and F M( M d ) ( F ( u )) = M ( pM d p ) where p is the spectral projection of F ( u ) corresponding to the maximal eigenvalue
Large Faces we assume k = d = 3 and call large face an exposed face of W F which is neither ∅ , nor a singleton, nor equal to all of W F nski, SW, ˙ Lemma (Szyma´ Zyczkowski) 1) Every large face is a segment or a filled ellipse. 2) Each two distinct large faces intersect in a singleton. 3) If G 1 , G 2 , G 3 are mutually distinct large faces and G 1 ∩ G 2 ∩ G 3 = ∅ , then W F has a corner point. 4) If there are two distinct large faces which are seg- ments, then W F has a corner point.
Graph Embedding 2) and 3) of the lemma show that a complete graph K n embeds into the union of large faces with one vertex on each large face the boundary of W F is homeomorphic to the sphere S 2 so n ≤ 4 nski, SW, ˙ Theorem (Szyma´ Zyczkowski) Let k = d = 3. If W F has no corner point, then the set of large faces has one of the following configurations.
Finding Examples
Finding Candidates searching for candidates belonging to each class, we used • random matrices • guessing and found some new examples (red) Question: How to determine the class of an example?
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries





![Classification Image Classification Set of predefined categories [eg: table, apple, dog, giraffe]](https://c.sambuz.com/743996/classification-s.webp)