Chapter4 Informed Search and Exploration 2 20070322 chap4 1 - PDF document
Tree Search (Reviewed, Fig. 3.9) Chapter4 Informed Search and Exploration 2 20070322 chap4 1 20070322 chap4 Best-First Search Search Strategies An instance of the general Tree Search. A search strategy is defined by
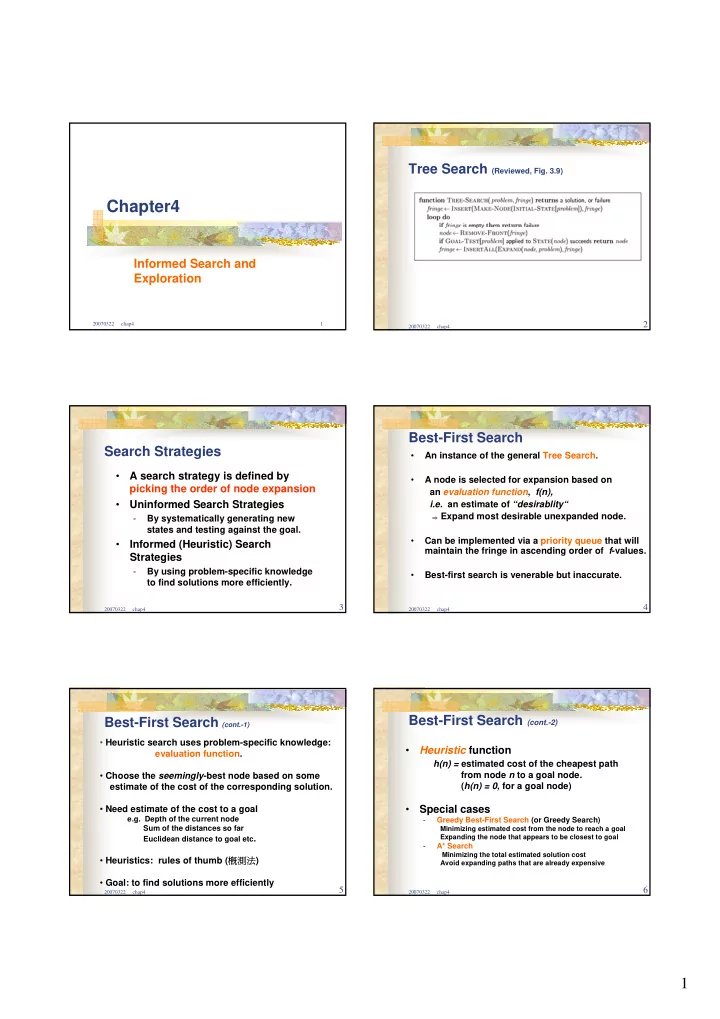
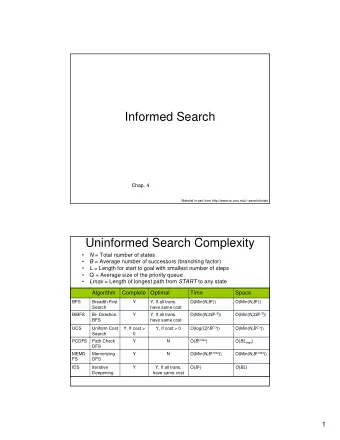
Tree Search (Reviewed, Fig. 3.9) Chapter4 Informed Search and Exploration 2 20070322 chap4 1 20070322 chap4 Best-First Search Search Strategies • An instance of the general Tree Search. • A search strategy is defined by • A node is selected for expansion based on picking the order of node expansion an evaluation function , f(n), • Uninformed Search Strategies i.e. an estimate of “desirablity“ ⇒ Expand most desirable unexpanded node. - By systematically generating new states and testing against the goal. • Can be implemented via a priority queue that will • Informed (Heuristic) Search maintain the fringe in ascending order of f -values. Strategies - By using problem-specific knowledge • Best-first search is venerable but inaccurate. to find solutions more efficiently. 3 4 20070322 chap4 20070322 chap4 Best-First Search (cont.-2) Best-First Search (cont.-1) • Heuristic search uses problem-specific knowledge: • Heuristic function evaluation function. h(n) = estimated cost of the cheapest path • Choose the seemingly -best node based on some from node n to a goal node . ( h(n) = 0, for a goal node) estimate of the cost of the corresponding solution. • Need estimate of the cost to a goal • Special cases e.g. Depth of the current node - Greedy Best-First Search (or Greedy Search) Sum of the distances so far Minimizing estimated cost from the node to reach a goal Euclidean distance to goal etc . Expanding the node that appears to be closest to goal - A* Search Minimizing the total estimated solution cost • Heuristics: rules of thumb ( 概測法 ) Avoid expanding paths that are already expensive • Goal: to find solutions more efficiently 5 6 20070322 chap4 20070322 chap4 1
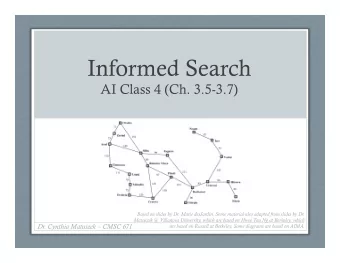
Heuristics Heuristics (cont.) • A heuristic algorithm • Heuristic is derived from heuriskein in Greek, improves the average-case performance, meaning “to find” or “to discover” does not necessarily improve the worst-case performance. • The term heuristics is often used to describe rules of thumb ( 經驗法則 ) or advice • Not all heuristic functions are beneficial. that are generally effective, but are not guaranteed - The time spent evaluating the heuristic function in order to to work in every case. select a node for expansion must be recovered by a corresponding reduction in the size of the search space • In the context of search, a heuristic is a function that explored . takes a state as an argument - Useful heuristics should be computationally inexpensive! and returns a number that is an estimate of the merit of the state with respect to the goal. 7 8 20070322 chap4 20070322 chap4 Greedy Best-First Search Romania with step costs in km Straight-line distances to Bucharest • Heuristic function : h ( n ) = estimated best cost to goal from n h ( n ) = 0 if n is a goal e.g. h SLD ( n ) = straight-line distance for route-finding Function GREEDY-SEARCH( problem ) return a solution or failure return BEST-FIRST-SEARCH( problem, h ) 9 10 20070322 chap4 20070322 chap4 Greedy Best-First Search Example Greedy Best-First Search Example (cont.-1) • The first expansion step produces: • Assume that we want to use greedy search Sibiu, Timisoara and Zerind to solve the problem of travelling from Arad to Bucharest. • Greedy best-first will select Sibiu • The initial state=Arad 11 12 20070322 chap4 20070322 chap4 2
Greedy Best-First Search Example (cont.-2) Greedy Best-First Search Example (cont.-3) • If Sibiu is expanded we get: • If Fagaras is expanded we get: Arad, Fagaras, Oradea and Rimnicu Vilcea Sibiu and Bucharest • Greedy best-first search will select: Fagaras • Goal reached !! • Yet not optimal (see Arad → Sibiu → Rimnicu Vilcea → Pitesti ) 13 14 20070322 chap4 20070322 chap4 Analysis of Greedy Search Analysis of Greedy Search (cont.) Complete?? Optimal?? No (same as depth-first search) No (start down an infinite path and never return to try other possibilities) (e.g. from Arad to Bucharest) Arad → Sibiu → Fagaras → Bucharest (e.g. from Iasi to Fagaras) (450=140+99+211, is not shortest) - Susceptible to false starts Arad → Sibiu → Rim → Pitesti → Bucharest Iasi → Neamt (dead end) (418=140+80+97+101) - No Repeated states Checking Iasi → Neamt → Iasi → Neamt → Iasi → ….. (oscillation) Time?? (like depth-first search) - worst: O ( b m ), but a good heuristic can give dramatic improvement m : the maximum depth of the search space Space?? O ( b m ): keep all nodes in memory 15 16 20070322 chap4 20070322 chap4 A* Search Admissible Heuristic function A*-SEARCH( problem ) returns a solution or failure • A* search uses an admissible heuristic return BEST-FIRST-SEARCH( problem, g+h) i.e. h(n) ≤ h * (n) where h * (n) is the true cost from n (Also h(n) ≥ 0 , so h(G) = 0 for any goal G ) • To minimizing the total estimated solution cost • Evaluation function: f(n) = estimated cost of the cheapest solution • Theorem: through n to goal If h(n) is admissible, A* using tree-search is optimal . = g(n) + h(n) g(n) = cost so far to reach n • It is both complete and optimal if h never h(n) = estimated cost from n to the goal overestimates the cost to the goal. 17 18 20070322 chap4 20070322 chap4 3
A* Search Example A* Search Example (cont.-1) • Expand Arrad and determine f(n) for each node • Find Bucharest starting at Arad f(Sibiu)=c(Arad,Sibiu)+h(Sibiu)=140+253=393 f(Arad) = c(??,Arad)+h(Arad)=0+366=366 f(Timisoara)=c(Arad,Timisoara)+h(Timisoara)=118+329=447 f(Zerind)=c(Arad,Zerind)+h(Zerind)=75+374=449 • Best choice is Sibiu 19 20 20070322 chap4 20070322 chap4 A* Search Example (cont.-2) A* Search Example (cont.-3) • Expand Sibiu and determine f(n) for each node f(Arad)=c(Sibiu,Arad)+h(Arad)=280+366=646 • Expand Rimnicu Vilcea and determine f(n) for each node f(Fagaras)=c(Sibiu,Fagaras)+h(Fagaras)=239+179=415 f(Craiova)=c(Rimnicu Vilcea, Craiova)+h(Craiova)=360+160=526 f(Oradea)=c(Sibiu,Oradea)+h(Oradea)=291+380=671 f(Pitesti)=c(Rimnicu Vilcea, Pitesti)+h(Pitesti)=317+100=417 f(Rimnicu Vilcea)=c(Sibiu,Rimnicu Vilcea)+h(Rimnicu Vilcea) f(Sibiu)=c(Rimnicu Vilcea,Sibiu)+h(Sibiu)=300+253=553 =220+192=413 • Best choice is Fagaras • Best choice is Rimnicu Vilcea 21 22 20070322 chap4 20070322 chap4 A* Search Example (cont.-4) A* Search Example (cont.-5) • Expand Fagaras and determine f(n) for each node f(Sibiu)=c(Fagaras, Sibiu)+h(Sibiu)=338+253=591 f(Bucharest)=c(Fagaras,Bucharest)+h(Bucharest)=450+0 • Expand Pitesti and determine f(n) for each node =450 f(Bucharest)=c(Pitesti,Bucharest)+h(Bucharest)=418+0=418 • Best choice is Pitesti • Best choice is Bucharest • Optimal solution (only if h(n) is admissable) • Note values along optimal path 23 24 20070322 chap4 20070322 chap4 4
Optimality of A* ( cont.-1 ) Optimality of A* • C* : cost of the optimal solution path Suppose some suboptimal goal G 2 has been generated A* may expand some nodes before selecting a goal node. and is in the queue. Let n be an unexpanded node on a shortest path • Assume: G is an optimal and G 2 is a suboptimal goal . to an optimal goal G . f ( G 2 ) = g ( G 2 ) + h ( G 2 ) = g ( G 2 ) > C* -------- (1) For some n on an optimal path to G , if h is admissible, then f ( n ) = g ( n ) + h ( n ) ≤ C* -------- (2) From (1) and (2), we have f ( n ) ≤ C* < f ( G 2 ) So, A* will never select G 2 for expansion. 25 26 20070322 chap4 20070322 chap4 Monotonicity (Consistency) of Heuristic Optimality of A* ( cont.-2 ) • A heuristic is consistent if h ( n ) ≤ c ( n, a, n’ ) + h ( n’ ) • BUT … graph search (instead of tree-search) The estimated cost of reaching the goal from n is no greater than the step cost of getting to successor n’ • Discards new paths to repeated state. plus the estimated cost of reaching the goal from n’ - Previous proof breaks down • Solution: • If h is consistent, we have - Add extra bookkeeping f ( n’ ) = g ( n’ ) + h ( n’ ) = g ( n ) + c ( n, a, n’ ) + h ( n’ ) i.e. remove more expensive of two paths. ≥ g ( n ) + h ( n ) = f ( n ) Ensure that optimal path to any repeated state is - ⇒ f ( n’ ) ≥ f ( n ) always first followed. i.e. f(n) is non-decreasing along any path. Extra requirement on h(n) : consistency (monotonicity) • Theorem: If h(n) is cosisient, A* using graph search is optimal . 27 28 20070322 chap4 20070322 chap4 Optimality of A* ( cont.-3 ) Analysis of A* Search Complete?? Yes • A* expands nodes in order of increasing f value Gradually adds “ f -contours” of nodes unless there are indefinitely many nodes with f ≤ f(G) Contour i has all nodes with f = f i , where f i < f i+1 Space?? O(b d ), keep all nodes in memory • All nodes with f(n) > C* (optimal solution) are pruned . Optimal?? Yes, if the heuristic is admissible Optimally Efficient?? Yes i.e. No other optimal algorithm is guaranteed to expand fewer nodes than A* A* is not practical for many large-scale problems. (Since A* usually runs out of space long before it runs out of time.) 29 30 20070322 chap4 20070322 chap4 5
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.