Bo a rd Pre se nta tio n 20F E B19 Ca rso n City, NV (K CXP) Nig httime F e a sib ility Study
Nig httime Ope ra tio ns Cha lle ng e Po te ntia l So lutio n(s) F e a sib ility Be ne fits Study Co st a nd Sc he dule L ike liho o d o f F AA Appro va l 2
❑ F x E nviro nme nta l Ana lysis uture a na lysis re q uire d to No t e xa mine NE PA inc lude d ❑ E xhib its a re pro vide d fo r in this ROM c o st e stima tio n a nd x De sig n c rite ria c o nside ra tio ns F e a sib ility ❑ Me c ha nisms to o b ta in Study funding wo uld b e x F unding a ddre sse d via o the r pro c e sse s ❑ Study still ne e ds to b e x F AA Re vie w re vie we d with F AA Sta ke ho lde rs 3
Nig httime Re stric tio ns F lig ht I nspe c tio n • (SP-07-268-15) Spe c ia l re q ue st fo r nig ht e va lua tio n a t Ca rso n, Ca rso n City NV. E va lua tio n c o mple te d UNSAT fo r SI AP use a t nig ht. Bo th the RNAV (GPS)- A AMDT 1 a nd RNAV (GPS) RWY 27 ORI G-A we re e va lua te d a nd de te rmine d to ha ve insuffic ie nt visua l re fe re nc e s a t nig ht with re g a rd to surro unding unlit, hig h te rra in. T he se e nviro nme nta l fa c to rs do no t pro vide a pilo t with the pro pe r visua l c ue s ne c e ssa ry to "se e a nd a vo id o b sta c le s" a s sta te d in the Ae ro na utic a l I nfo rma tio n Ma nua l se c tio n 5-4-20.b .1 o nc e b e lo w the MDA. Co nditio ns uniq ue to the nig ht time e nviro nme nt pre se nt a sig nific a nt ha za rd during the visua l ma ne uve ring se g me nt to e xe c ute a sa fe la nding a t nig ht fro m a n instrume nt a ppro a c h. Runwa y 09 PAPI s a re c urre ntly pro hib ite d fro m nig ht use . 4
Nig httime Re stric tio ns RNAV (GPS) - A 1. F lig ht I nspe c tio n Cre ws Co uld No t Disting uish T e rra in Alo ng Circ ling Appro a c h (No rth a nd So uth o f Runwa y) 5
2. F lig ht I nspe c tio n Cre ws Co uld No t Disting uish T e rra in Alo ng Visua l Po rtio n o f Offse t Appro a c h 3. No po sitive c o urse g uida nc e a lo ng c irc ling o r o ffse t a ppro a c h to a ssist pilo ts in a vo iding te rra in Nig httime Re stric tio ns RNAV (GPS) - 27 6
Ae ro na utic a l Da ta a nd F lig ht Pro c e dure s 7
Aeronautical Data ✓ Runway 09/27 is marked and lighted to accommodate nighttime operations ✓ REILs create additional safety for nighttime ops ✓ AWOS-3PT enables 24/7/365 local weather reporting ✓ VGSI (PAPI) on runway 27 is sufficient for straight-in obstacle/terrain separation x VGSI (PAPI) on runway 09 is not sufficient for straight-in obstacle/terrain separation at night 8
Existing Approaches 9
✓ ✓ Ne w Circ ling Crite ria CAT A-B Crite ria Co mplia nt x Old Circ ling Crite ria x CAT C-D Ca n no t b e a dde d ✓ L imite d Circ ling E xte nt x No limita tio n o n due to o ffse t >20 De g Circ ling E xte nt ❑ E xplo re Ob sta c le x Old Circ ling Crite ria L ig hting ❑ E xplo re Ob sta c le ❑ E xplo re E xte nde d Appro a c h L ig hting o r Circ ling ❑ E xplo re E xte nde d L ig hting Syste m L ig hts (I CAO Only) Appro a c h L ig hting Syste m 10
Future Approaches A – C Ca pa b le ✓ CAT ✓ Suppo rts 700ft – 2 Mile s x RNP-AR Will L imit Utiliza tio n x Misse d Approa c h L imite d x Runwa y T CH Ne e ds to I nc re a se ❑ Po te ntia l to Co nside r L NAV to E xte nde d ❑ Wo uld b e ne fit fro m MAL S o r MAL SF Approach Light System “Fly Visual to Airport When Established on RLLS” ❑ Wo uld b e ne fit fro m e xte nde d a ppro a c h lig ht syste m 11
Ge o spa tia l Co nside ra tio ns 12
Ge o spa tia l F AA AC-150-5300-18B VGA Surve y • E xisting Ob sta c le s F AA DDOF • De c o nflic te d Ob sta c le s F AA OE / AAA • Windfa rm Ca rso n City GI S • Building He ig hts • Zo ning 13
Po ssib le E xte nde d 4 Appro a c h 3 L ig ht Syste m 1 2 • Use d c urre nt a nd future a ppro a c h c e nte rline s a s the b a sis fo r site e xplo ra tio n • E xplo re d c urre nt a irpo rt lig hting a nd va ult fo r so lutio ns c lo se to thre sho ld • I nve stig a te d o ffsite fo r a va ila b le po we r a nd e le va tio n
Site Asse ssme nt E xisting She lte r a nd T ra nsfo rme r Vic inity 15
Site Asse ssme nt Arra y 1 a nd 2 Vic inity 16
Site Asse ssme nt Arra y 3 Vic inity 17
Site Asse ssme nt Arra y 4 Vic inity 18
L ig hting So lutio ns 19
Ob sta c le L ig hts Ob sta c le L ig hts • 16 Ob sta c le L ig ht Are a s (Initia l E stima te ) • So la r/ L E D • 5 Ye a r Re pla c e me nt Be ne fits • Illumina te s hig he st te rra in in visua l se g me nt o f a ppro a c h • Pro vide s te rra in a wa re ne ss in te rmina l a re a Dra wb a c ks • Do e s no t c o ve r e ntire c irc ling o r te rmina l a re a • Do e s no t c re a te o b vio us pa th to runwa y • Ma y no t re sult in SAT fo r nig httime o pe ra tio ns • Ca n no t b e mo nito re d fro m a irpo rt, witho ut sub sta ntia l c o st • L a nd must still b e a c q uire d fo r po le mo unt a b o ve ve g e ta tio n 20
Po te ntia l Ob sta c le L ig ht Are a s All Ob sta c le lig hting surfa c e s a re e stima te s b a se d o n pilo t pe rc e ptio n, a c tua l numb e r o f o b sta c le lig ht lo c a tio ns will re q uire simula to r a nd flig ht inspe c tio n 21
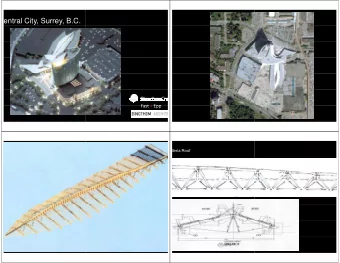
E xte nde d Appro a c h L ig ht Syste m Runwa y L e a d -In L ig ht Syste m (RL L S) • Se q ue nc e o f L e a d -In (L DIN) L ig ht a rra ys • Use d fo r c ha lle ng ing te rra in se pa ra tio n, urb a n de c o nflic tio n a nd no ise a b a te me nt Be ne fits • F AA c a n c o nside r a ppro a c h lig ht c re dit with a n RL L S, if a pplic a b le to pro c e dure • Ca n b e use d with b y a ll pilo t skill le ve l • Cre a te s po sitive c o urse g uida nc e to runwa y Cha lle ng e s • Off a irpo rt de sig n • Do e s no t typic a lly put te rra in into pe rspe c tive
Ac tive F AA RL L S I nsta lla tio ns • 12 Ac tive US RL L S I nsta lla tio ns • Mo st fa mo us is Ne w Yo rk (K JF K ) Ca na rsie Appro a c h Airpo rt RWY L ig hts Visibility Cre dit O ff Airpo rt • Yo uT ub e Appro a c h a t Nig ht KRID 24 5 (ODAL S F lashing ) Y e s N PAGB 13 Unkno w n Unkno w n N KHQZ 18 3 No N KHQZ 36 5 No N KSRB 4 4 Y e s N • June a u (PAJN) ha s o ne o f the PAJN 8 5, 5, 5 to MAL SF Y e s (L NAV Only) Y KPWK 16 21 (Arrang e d in MAL SF Patte rn) No N o lde st c o ntinuo us RL L S fo r o ffse t KJF K 13L 7, 21, 5, 5 to AL SF -II No Y KJF K 13R 7 No Y L DA a nd RNAV a ppro a c h to KT RL 17 6 No N KMDW 13C 3 No N runwa y 08 KMDW 31C 3 No N KMSY 2 5 No N KDPA 10 5 No N KSUE 2 3 No N
L ig hting So lutio ns: RL L S Optio ns A B • All RL L S Optio ns Co nside r • L DIN o r MAL S a t Runwa y T hre sho ld 1 • 1 L DIN Arra y a t Offse t F lig ht Pro c e dure Junc ture • 1 L DIN Ne a r MDA • 2 Ob sta c le L ig hts 2 Prima ry Va ria tio ns (1 – 4) • • At Runwa y T hre sho ld • MAL S • MAL SF • 3 L ig ht L DI N • At Offse t F lig ht Pro c e dure Junc ture 3 • 3 L ig ht L DI N • 5 L ig ht L DI N • Se c o nda ry Va ria tio ns (A a nd B) • Additio na l 3 L ig ht L DIN a t F uture MDA fo r CAT 4 C/ D 24
Optio n A1: MAL S, 5xL DI N, 3xL DI N, 3xL DI N Optio n B1: MAL S, 5xL DI N, 3xL DI N 25
26
ROM Co st E stima tio n Dire c t Cost De sig n a nd Imple me nta tion Cost • Po we r E • T le me nts e sting a nd Co mmissio ning • L ig hts • De sig n a nd CM • Ca b ling • F lig ht I nspe c tio n • Duc tb a nk • Co nting e nc y • T ra nsfo rme rs • NV E ne rg y Co nne c tio ns • Co ntro l E L imita tions le me nts • No e stima te d c o st fo r • She lte rs/ F e nc ing pro pe rty e a se me nts • F o unda tio ns/ Po le s • F ina l numb e r, po sitio n a nd • So la r Ob sta c le L ig hts o rie nta tio n o f L DI N a rra ys will dire c tly e ffe c t o ve ra ll c o st 27
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries