B5.1 Motivation in the size of the transition system (i.e., the - PowerPoint PPT Presentation
Planning and Optimization October 20, 2016 B5. Computational Complexity of Planning: Background Planning and Optimization B5.1 Motivation B5. Computational Complexity of Planning: Background B5.2 Background: Turing Machines Malte Helmert
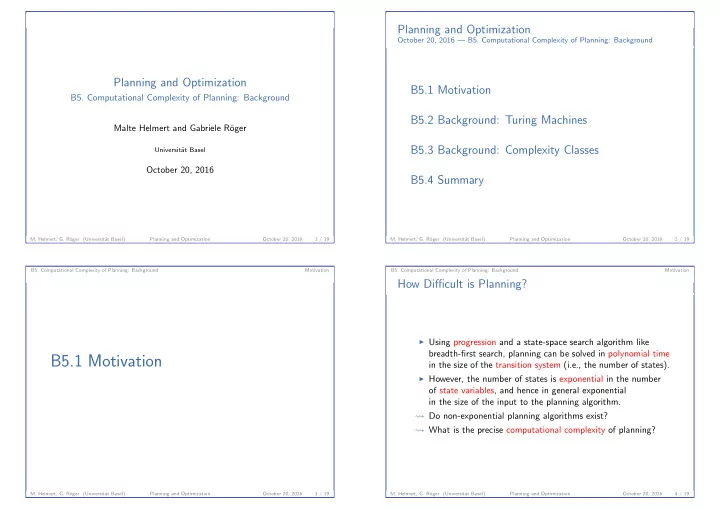
Planning and Optimization October 20, 2016 — B5. Computational Complexity of Planning: Background Planning and Optimization B5.1 Motivation B5. Computational Complexity of Planning: Background B5.2 Background: Turing Machines Malte Helmert and Gabriele R¨ oger B5.3 Background: Complexity Classes Universit¨ at Basel October 20, 2016 B5.4 Summary M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 1 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 2 / 19 B5. Computational Complexity of Planning: Background Motivation B5. Computational Complexity of Planning: Background Motivation How Difficult is Planning? ◮ Using progression and a state-space search algorithm like breadth-first search, planning can be solved in polynomial time B5.1 Motivation in the size of the transition system (i.e., the number of states). ◮ However, the number of states is exponential in the number of state variables, and hence in general exponential in the size of the input to the planning algorithm. � Do non-exponential planning algorithms exist? � What is the precise computational complexity of planning? M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 3 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 4 / 19
B5. Computational Complexity of Planning: Background Motivation B5. Computational Complexity of Planning: Background Background: Turing Machines Why Computational Complexity? ◮ understand the problem B5.2 Background: Turing Machines ◮ know what is not possible ◮ find interesting subproblems that are easier to solve ◮ distinguish essential features from syntactic sugar ◮ Is STRIPS planning easier than general planning? ◮ Is planning for FDR tasks harder than for propositional tasks? M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 5 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 6 / 19 B5. Computational Complexity of Planning: Background Background: Turing Machines B5. Computational Complexity of Planning: Background Background: Turing Machines Reminder: Complexity Theory Nondeterministic Turing Machines Need to Catch Up? ◮ This and the following section are mostly reminders. Definition (Nondeterministic Turing Machine) ◮ We assume knowledge of complexity theory: ◮ languages and decision problems A nondeterministic Turing machine (NTM) is a 6-tuple ◮ Turing machines: NTMs and DTMs; � Σ , � , Q , q 0 , q Y , δ � with the following components: polynomial equivalence with other models of computation ◮ input alphabet Σ and blank symbol � / ∈ Σ ◮ complexity classes: P and NP ◮ alphabets always nonempty and finite ◮ polynomial reductions ◮ tape alphabet Σ � = Σ ∪ { � } ◮ If you are not familiar with these topics, we recommend ◮ finite set Q of internal states with initial state q 0 ∈ Q Parts C and E of the Theorie der Informatik course and accepting state q Y ∈ Q at http://informatik.unibas.ch/fs2016/ ◮ nonterminal states Q ′ := Q \ { q Y } theorie-der-informatik/ . ◮ transition relation δ ⊆ ( Q ′ × Σ � ) × ( Q × Σ � × {− 1 , +1 } ) ◮ The slides are in English, even though the course is not. Note: the space complexity classes (DSPACE, NSPACE, PSPACE, NPSPACE) go beyond the content of the prerequisite course. M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 7 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 8 / 19
B5. Computational Complexity of Planning: Background Background: Turing Machines B5. Computational Complexity of Planning: Background Background: Turing Machines Deterministic Turing Machines Turing Machine Configurations Definition (Configuration) Definition (Deterministic Turing Machine) Let M = � Σ , � , Q , q 0 , q Y , δ � be an NTM. A deterministic Turing machine (DTM) is an NTM where the transition relation is functional, i.e., for all � q , a � ∈ Q ′ × Σ � , � × Q × Σ + A configuration of M is a triple � w , q , x � ∈ Σ ∗ � . there is exactly one triple � q ′ , a ′ , ∆ � with �� q , a � , � q ′ , a ′ , ∆ �� ∈ δ . ◮ w : tape contents to the left of tape head Notation: We write δ ( q , a ) for the unique triple � q ′ , a ′ , ∆ � such ◮ q : current state that �� q , a � , � q ′ , a ′ , ∆ �� ∈ δ . ◮ x : tape contents at tape head and to its right M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 9 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 10 / 19 B5. Computational Complexity of Planning: Background Background: Turing Machines B5. Computational Complexity of Planning: Background Background: Turing Machines Turing Machine Transitions Accepting Configurations Definition (Accepting Configuration: Time) Definition (Yields) Let M = � Σ , � , Q , q 0 , q Y , δ � be an NTM, Let M = � Σ , � , Q , q 0 , q Y , δ � be an NTM. let c = � w , q , x � be a configuration of M , and let n ∈ N 0 . A configuration c of M yields a configuration c ′ of M , ◮ If q = q Y , M accepts c in time n . in symbols c ⊢ c ′ , as defined by the following rules, ◮ If q � = q Y and M accepts some c ′ with c ⊢ c ′ in time n , � , q , q ′ ∈ Q and where a , a ′ , b ∈ Σ � , w , x ∈ Σ ∗ then M accepts c in time n + 1. �� q , a � , � q ′ , a ′ , ∆ �� ∈ δ : Definition (Accepting Configuration: Space) � w , q , ax � ⊢ � wa ′ , q ′ , x � if ∆ = +1 , | x | ≥ 1 Let M = � Σ , � , Q , q 0 , q Y , δ � be an NTM, � w , q , a � ⊢ � wa ′ , q ′ , � � if ∆ = +1 let c = � w , q , x � be a configuration of M , and let n ∈ N 0 . � wb , q , ax � ⊢ � w , q ′ , ba ′ x � if ∆ = − 1 ◮ If q = q Y and | w | + | x | ≤ n , M accepts c in space n . � ε, q , ax � ⊢ � ε, q ′ , � a ′ x � if ∆ = − 1 ◮ If q � = q Y and M accepts some c ′ with c ⊢ c ′ in space n , then M accepts c in space n . Note: “in time/space n ” means at most n , not exactly n M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 11 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 12 / 19
B5. Computational Complexity of Planning: Background Background: Turing Machines B5. Computational Complexity of Planning: Background Background: Complexity Classes Accepting Words and Languages Definition (Accepting Words) Let M = � Σ , � , Q , q 0 , q Y , δ � be an NTM. M accepts the word w ∈ Σ ∗ in time (space) n ∈ N 0 B5.3 Background: Complexity iff M accepts � ε, q 0 , w � in time (space) n . Classes ◮ Special case: M accepts ε in time (space) n ∈ N 0 iff M accepts � ε, q 0 , � � in time (space) n . Definition (Accepting Languages) Let M = � Σ , � , Q , q 0 , q Y , δ � be an NTM, and let f : N 0 → N 0 . M accepts the language L ⊆ Σ ∗ in time (space) f iff M accepts each word w ∈ L in time (space) f ( | w | ), and M does not accept any word w / ∈ L (in any time/space). M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 13 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 14 / 19 B5. Computational Complexity of Planning: Background Background: Complexity Classes B5. Computational Complexity of Planning: Background Background: Complexity Classes Time and Space Complexity Classes Polynomial Time and Space Classes Definition (DTIME, NTIME, DSPACE, NSPACE) Let P be the set of polynomials p : N 0 → N 0 Let f : N 0 → N 0 . whose coefficients are natural numbers. Complexity class DTIME( f ) contains all languages Definition (P, NP, PSPACE, NPSPACE) accepted in time f by some DTM. Complexity class NTIME( f ) contains all languages P = � p ∈P DTIME( p ) accepted in time f by some NTM. NP = � p ∈P NTIME( p ) PSPACE = � p ∈P DSPACE( p ) Complexity class DSPACE( f ) contains all languages accepted in space f by some DTM. NPSPACE = � p ∈P NSPACE( p ) Complexity class NSPACE( f ) contains all languages accepted in space f by some NTM. M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 15 / 19 M. Helmert, G. R¨ oger (Universit¨ at Basel) Planning and Optimization October 20, 2016 16 / 19
Recommend



![Indoor Places Lukas Kuster Motivation GPS for localization [7] 2 Motivation Indoor](https://c.sambuz.com/951195/indoor-places-s.webp)






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.