AutoDiff: Reverse Mode v 0 v 5 v 2 v 3 ln x 1 v 0 v 5 v 2 v 1 - PowerPoint PPT Presentation
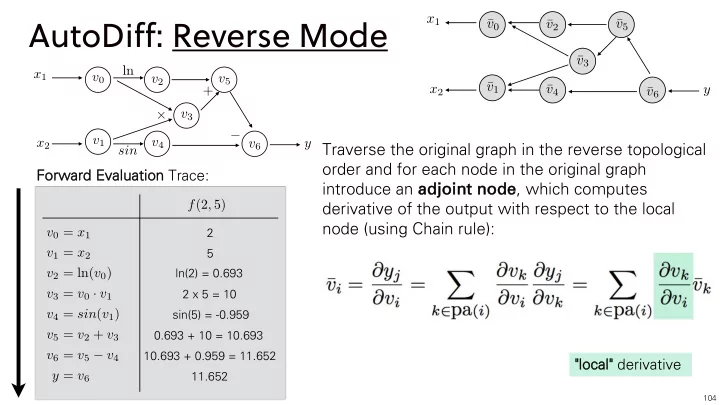
x 1 AutoDiff: Reverse Mode v 0 v 5 v 2 v 3 ln x 1 v 0 v 5 v 2 v 1 + x 2 v 4 y v 6 + v 3 v 1 Traverse the original graph in the reverse topological v 4 x 2 y v 6 sin order and for each node in the original
x 1 ¯ ¯ ¯ AutoDiff: Reverse Mode v 0 v 5 v 2 ¯ v 3 ln x 1 v 0 v 5 v 2 ¯ v 1 ¯ + x 2 v 4 ¯ y v 6 + v 3 − v 1 Traverse the original graph in the reverse topological v 4 x 2 y v 6 sin order and for each node in the original graph Forwar ard Eval valuat ation Trace: introduce an ad adjo join int node node , which computes f (2 , 5) derivative of the output with respect to the local node (using Chain rule): 2 v 0 = x 1 v 1 = x 2 5 ln(2) = 0.693 v 2 = ln( v 0 ) 2 x 5 = 10 v 3 = v 0 · v 1 sin(5) = -0.959 v 4 = sin ( v 1 ) v 5 = v 2 + v 3 0.693 + 10 = 10.693 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 "local cal" derivative y = v 6 11.652 104
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 ¯ v 2 = ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 ¯ v 5 = ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 ¯ ∂ v 6 105
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 ¯ v 2 = ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 ¯ v 5 = ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 ¯ ∂ v 6 106
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 v 2 = ¯ ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 ¯ v 5 = ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 1 ¯ ∂ v 6 107
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 v 2 = ¯ ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 ¯ v 5 = ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 1 ¯ ∂ v 6 108
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 v 2 = ¯ ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 ¯ v 5 = ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 1 ¯ ∂ v 6 109
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 v 2 = ¯ ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 ¯ v 5 = ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 1 ¯ ∂ v 6 110
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 v 2 = ¯ ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 1x1 = 1 v 5 = ¯ ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 1 ¯ ∂ v 6 111
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 v 2 = ¯ ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 1x1 = 1 v 5 = ¯ ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 1 ¯ ∂ v 6 112
AutoDiff: Reverse Mode ln x 1 v 0 v 5 v 2 + + v 3 Backwards Derivative Backw ackwar ards Derivat vative ve Trace: − v 1 v 4 x 2 y v 6 sin ∂ v 3 ∂ v 2 1 v 0 = ¯ ¯ + ¯ = ¯ v 3 v 1 + ¯ 5.5 v 3 v 2 v 2 Forwar ard Eval valuat ation Trace: ∂ v 0 ∂ v 0 v 0 ∂ v 1 ∂ v 0 ∂ v 3 ∂ v 4 f (2 , 5) = ¯ v 3 v 0 + ¯ v 4 cos ( v 1 ) 1.716 v 1 = ¯ ¯ 1 = ¯ + ¯ v 3 v 4 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v 1 ∂ v ∂ v 5 2 v 0 = x 1 = ¯ v 5 · (1) 1x1 = 1 v 2 = ¯ ¯ v 5 ∂ v 2 v 1 = x 2 5 ∂ v 2 ∂ v 5 ln(2) = 0.693 v 2 = ln( v 0 ) = ¯ v 5 · (1) 1x1 = 1 v 3 = ¯ ¯ v 5 ∂ v 3 ∂ v 3 2 x 5 = 10 v 3 = v 0 · v 1 ∂ v 6 = ¯ v 6 · ( − 1) sin(5) = -0.959 v 4 = sin ( v 1 ) 1x-1 = -1 ¯ v 4 = ¯ v 6 ∂ v 4 ∂ v 4 v 5 = v 2 + v 3 0.693 + 10 = 10.693 ∂ v 6 = ¯ v 6 · 1 1x1 = 1 v 5 = ¯ ¯ 1x1 = 1 v 6 v 6 = v 5 − v 4 10.693 + 0.959 = 11.652 ∂ v 5 ∂ v 5 ∂ y v 6 = ∂ y y = v 6 11.652 1 1 ¯ ∂ v 6 113
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.