Asymptotically Optimal Design of Piecewise Cylindrical Robots using - PowerPoint PPT Presentation
Asymptotically Optimal Design of Piecewise Cylindrical Robots using Motion Planning c 1 1 l 2 c 2 2 c 3 3 Cenk Baykal and Ron Alterovitz Lung Cancer: The Deadliest Cancer in the US Early stage diagnosis is critical, and requires
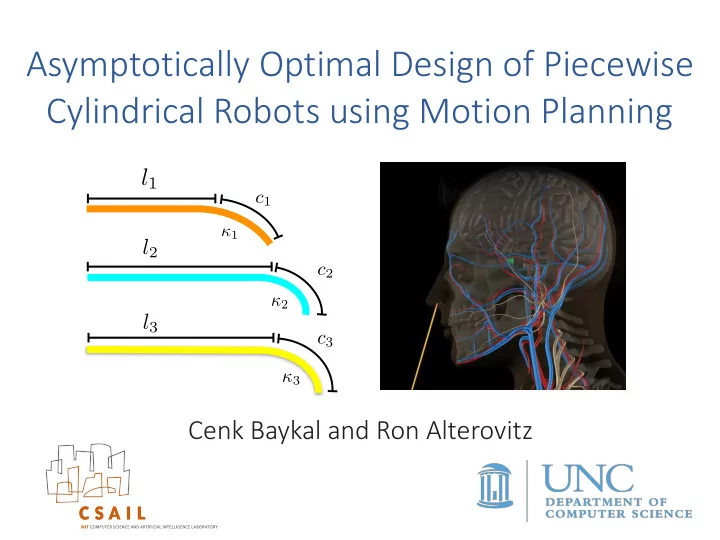
Asymptotically Optimal Design of Piecewise Cylindrical Robots using Motion Planning c 1 κ 1 l 2 c 2 κ 2 c 3 κ 3 Cenk Baykal and Ron Alterovitz
Lung Cancer: The Deadliest Cancer in the US Early stage diagnosis is critical, and requires biopsy Concentric tube robots can avoid obstacles and perform safe biopsies Patient-specific robot design necessary for reaching clinical targets
Design Affects Reachability Start
Design Affects Reachability Start
Design Affects Reachability
Design Affects Reachability
We now have the ability to quickly and cheaply create customized robots 3D Printing Tube shape setting [Gilbert 2016]
Design of Piecewise Cylindrical Robots Goal l 2 Serial Manipulator l 4 c 1 κ 1 Concentric l 2 c 2 Tube Robot κ 2 c 3 κ 3
Meeting Task-specific Needs Fail Generic Design Target Fail Success Optimal Design Success
Create Customized Robot Computational Design Optimization Inputs Task Execution c 1 κ 1 l 2 Environment c 2 κ 2 c 3 κ 3 Rapid Fabrication Targets
Create Customized Our contribution Robot Computational Design Optimization Inputs Task Execution c 1 κ 1 l 2 Environment c 2 κ 2 c 3 κ 3 Rapid Fabrication Targets
Objective: Maximize Reachability Volume of goal region safely reachable under a given design
Objective: Maximize Reachability Volume of goal region safely reachable under a given design
Main Challenge Evaluating reachability under a design • Fundamentally a motion planning problem (PSPACE-hard) • State-of-the-art motion planners are sampling-based • Exact evaluations infeasible in practice
Main Challenge Evaluating reachability under a design • Fundamentally a motion planning problem (PSPACE-hard) • State-of-the-art motion planners are sampling-based • Exact evaluations infeasible in practice Objective function cannot be evaluated (exactly) within a practical amount of time
Related Work Burgner et al. (2016) Ha et al. (2017) Denarie et al. (2016) Bergeles et al. (2015) Ha et al. (2014) Torres et al. (2012)
Method Sampling Designs for Evaluation • Leverage properties for almost-sure convergence to an optimal design • Adaptive Simulated Annealing (ASA) Evaluating Reachability • Rapidly-exploring Random Trees (RRT) • Probabilistically-complete RRT: S. M. LaValle, Planning Algorithms, 2006 ASA: L. Ingber, Very fast simulated re-annealing, 1989 Video: S. Karaman (youtube.com/user/skaramanmovie)
Design Evaluations Cannot accurately evaluate (with certainty) a sampled design in finite time Easy-to-implement Idea: • Increase the number of RRT iterations after each evaluation • Ensures increasingly accurate reachability approximations
Design Evaluations Cannot accurately evaluate (with certainty) a sampled design in finite time Easy-to-implement Idea: • Increase the number of RRT iterations after each evaluation • Ensures increasingly accurate reachability approximations The design generated by our algorithm almost-surely converges to an optimal design See paper for formal proof
Serial Manipulator Experimental Setup Goal Obstacles region (red) l 4 l 2 Robot base
Serial Manipulator Design Optimization Example Scenarios:
Concentric Tube Robot Experimental Setup c 1 Goal region: Concentric κ 1 Obstacles: l 2 c 2 nodule Tube Robot blood vessels, κ 2 bronchial tubes (8 voxels) Design c 3 κ 3
Concentric Tube Robot Design Optimization Example Scenarios:
Asymptotically Optimal Design of Piecewise Cylindrical Robots using Motion Planning c 1 κ 1 l 2 c 2 κ 2 c 3 κ 3 Cenk Baykal and Ron Alterovitz
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.