An Energy-Efficient Parallel Algorithm for Real-Time Near-Optimal - PowerPoint PPT Presentation
An Energy-Efficient Parallel Algorithm for Real-Time Near-Optimal UAV Path Planning D. Palossi a , A. Marongiu ab , L. Benini ab B. Forsberg a , M. Furci b , R. Naldi b , L. Marconi b a ETH Zrich, b Univeristy of Bologna NVidia GTC17 Munich,
An Energy-Efficient Parallel Algorithm for Real-Time Near-Optimal UAV Path Planning D. Palossi a , A. Marongiu ab , L. Benini ab B. Forsberg a , M. Furci b , R. Naldi b , L. Marconi b a ETH Zürich, b Univeristy of Bologna NVidia GTC17 – Munich, October 10 th - 12 th , 2017 - #23356 D. Palossi et al. | 13.06.2017 | 1
Introduction There are many applications for autonomous Unmanned Aerial Vehicles (UAVs) Surveillance Aerial Mapping We focus on standard-size quadrotors Entertainment Rescue Mission Standard-size quadrotors (~50cm, few Kg, ~100W) → computational bound due to weight/battery One of the fundamental functional blocks for autonomous UAVs is the path planner D. Palossi et al. | 13.06.2017 | 2
Energy Efficiency Requirements Current standard-size UAV Next generation micro/nano-size UAV Current system Next Gen system Size [ ∅ , weight ] 50 cm / few Kg few cm / few g power budgets for Propellers Power Cons. hundreds of W few W / hundred mW pico-size UAV [1] Processing Device Class desktop CPU LP/ULP embedded Cognitive Skills fully autonomous If we want bring advanced cognitive skills of state-of-the-art systems into the next generation autonomous vehicles → energy efficient algorithms are key [1] Progress on "pico" air vehicles, R.J. Wood, B. Finio, M. Karpelson, K. Ma, N.O. Perez-Arancibia, P .S. Sreetharan, H. T anaka, and J.P . Whitney, Int. D. Palossi et al. | 13.06.2017 | 3 Symp. on Robotics Research (invited paper), Flagstafg, Az, Aug. 2011.
Energy Efficiency Requirements Current standard-size UAV Next generation We look into parallelism + near optimality micro/nano-size UAV as key solution to guarantee the energy requirements Current system Next Gen system Size [ ∅ , weight ] 50 cm / few Kg few cm / few g power budgets for Propellers Power Cons. hundreds of W few W / hundred mW pico-size UAV [1] Processing Device Class desktop CPU LP/ULP embedded Cognitive Skills fully autonomous If we want bring advanced cognitive skills of state-of-the-art systems into the next generation autonomous vehicles → energy efficient algorithms are key [1] Progress on "pico" air vehicles, R.J. Wood, B. Finio, M. Karpelson, K. Ma, N.O. Perez-Arancibia, P .S. Sreetharan, H. T anaka, and J.P . Whitney, Int. D. Palossi et al. | 13.06.2017 | 4 Symp. on Robotics Research (invited paper), Flagstafg, Az, Aug. 2011.
Outline Path Planning Application Graph computation and exploration Naive approximate and Atomic version Profile-based version Limitations of the Naive Approach Experimental Evaluation System Characterization Experimental Results The Predictable Execution Model (PREM) D. Palossi et al. | 13.06.2017 | 5
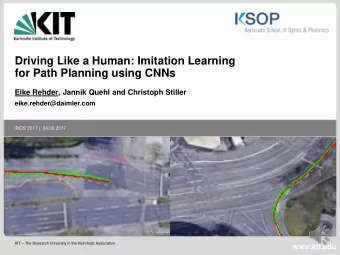
Path Planning Application Path Planning: constantly updates the route of the vehicle based on information sensed in real time selects the best path (according to specific metrics) responsible for preventing collisions with dynamic, unexpected obstacles the reactivity of the UAV depends on the path planner response time D. Palossi et al. | 13.06.2017 | 6
Graph Computation Quadrotor Automaton [1] Represents the kinematic and the constraints of the robot [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 7 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 8 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 9 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 10 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_45 - go_45 - go_45 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 11 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_45 - go_45 - go_45 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 12 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_45 - go_45 - go_45 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 13 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_45 - go_45 - go_45 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 14 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_45 - go_45 - go_45 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 15 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Obstacle detected in 2-3 Sequence of movements: go_45 - go_45 - go_45 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 16 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_0 - go_0 - go_90 - go_90 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 17 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_0 - go_0 - go_90 - go_90 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 18 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Graph Computation Quadrotor Automaton [1] Map Automaton Represents the kinematic and the constraints of the robot Represents location, possible connection and its constraints: obstacles Sequence of movements: go_0 - go_0 - go_90 - go_90 [1] M. Furci, A. Paoli, and R. Naldi. A supervisory control strategy for robot-assisted search and rescue in hostile environments. In Emerging Technologies Factory Automation D. Palossi et al. | 13.06.2017 | 19 (ETFA), 2013 IEEE 18th Conference on, pages 1–4, Sept 2013.
Recommend
















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.