An autonomous mobile manipulator for pheromone dispenser deployment in vineyards G. Bardaro, L. Bascetta, G. Beri, M. Matteucci, F. Polito Politecnico di Milano, Department of Electronics Information and Boiengineering
√ √ 3
Autonomous vineyard navigation Peccioli RIF Vineyard variability • Slope & rough terrain-> Mapping • Soil -> Slipage and Odometry • Vegetation -> Obstacles ROS tools improvement / tuning • Sensor fusion • Outdoor mapping • Local/global planners 4
LIDAR RTK GPS RGB-D camera for manipulation Jaco 2 , Kinova Robotics Frontal LIDAR for vineyard Husky A200, foliage monitoring Clearpath Robotics IMU
Sensor fusion with robot_localization 𝑦 𝑢 = 𝑣 𝑢 , 𝑦 𝑢−1 + 𝜗 𝑢 ; 𝑨 𝑢 𝑨 𝑢 = ℎ(𝑦 𝑢 ) + 𝜀 𝑢 Prediction phase 𝑦 𝑢−1 𝑦 𝑢 𝑦 𝑢 𝑦 𝑢+1 𝑣 𝑢 𝑣 𝑢+1 Correction phase 6
Vineyard Mapping Google Cartographer with robot_localization (Febraury 2017) 10
Vineyard Mapping ROS gmapping with robot_localization (Febraury 2017) 11
Sensor fusion with ROAMFREE (𝑃) 𝑓 𝑗 (𝑢) = 𝑨(𝑢; 𝑦 𝑇 𝑗 (𝑢), 𝜊) − 𝑨 + 𝜃 𝑇 𝐻𝑄𝑇 𝑓 𝐻𝑄𝑇 𝑓 𝐻𝑄𝑇 𝑦 𝑢 𝑦 𝑢+1 𝑦 𝑢+2 𝑦 𝑢+3 𝑓 𝑃𝐸𝑃 𝑓 𝑃𝐸𝑃 𝑓 𝑃𝐸𝑃 𝑓 𝑃𝐸𝑃 12
Vineyard Mapping Google Cartographer with ROAMFREE (Febraury 2017) 14
Vineyard Mapping ROS Gmapping with ROAMFREE (Febraury 2017) 15
Vineyard Mapping ROS Gmapping with ROAMFREE (July 2017) 16
Vineyard Mapping and Localization ROS Gmapping with ROAMFREE (February 2017) In Peccili RIF we experienced jumps introduced by AMCL conflicting with GPS global pose in ROAMFREE 17
Vineyard Mapping and Localization Highly symmetric environment Casciana Terme, Italy Planning through vinestocks Garriguella, Spain 18
GRAPE Autonomous Navigation Sensor transforms Laser/Velodyne robot_localization Prohibition layer teb_planner Husky wheel IMU odometry Husky base driver RTK GPS 19
Navigation system results
Navigation system results 21
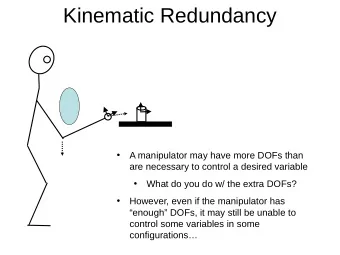
GRAPE manipulation challenges Automatic deployment of ISONET L dispenser for mating disruption against Lobesia botrana • Manipulation of small/deformable objects • Use of existing ROS packages for planning/control to speed up development • Visual-based control in challenging outdoor light conditions 22
Manipulation experimental setup 23
Manipulation experimental setup 24
Manipulation experimental setup 25
Deploiment point detection
Deploiment point detection
Dispenser grasping
Dispenser graping
Plant deployment
Plant deloyment
Nail deployment
Nail deployment
An autonomous mobile manipulator for pheromone dispenser deployment in vineyards G. Bardaro, L. Bascetta, G. Beri, M. Matteucci, F. Polito Politecnico di Milano, Department of Electronics Information and Boiengineering
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries