Adaptivity and blowup detection for nonlinear evolution PDEs - PowerPoint PPT Presentation
Adaptivity and blowup detection for nonlinear evolution PDEs Emmanuil Georgoulis and Department of Mathematics Department of Mathematics University of Leicester National Technical University of Athens UK Greece Based on joint work with:
Adaptivity and blowup detection for nonlinear evolution PDEs Emmanuil Georgoulis and Department of Mathematics Department of Mathematics University of Leicester National Technical University of Athens UK Greece Based on joint work with: A. Cangiani (Leicester), I. Kyza (Dundee), S. Metcalfe (Bern), Y. Sabawi (Leicester) 06.01.2016, Birmingham 1
Overview Motivation – blowup detection Rigorous a posteriori bounds for semilinear parabolic problems, valid up to blowup time Adaptivity and estimation of blowup time and near blowup A. Cangiani, E. H. Georgoulis, I. Kyza, S. Metcalfe , Adaptivity and blow-up detection for nonlinear evolution problems , in review. adaptive (high-order) methods for non-polygonal interface problems A. Cangiani, E. H. Georgoulis, Y. Sabawi , Adaptive discontinuous Galerkin methods for non-polygonal interface problems , in preparation. 2
A “simple” test case u t − ∆ u = u 2 , u (0 , x ) Gaussian � single point blowup 3
Motivation blowup time estimation is interesting for applications (physical/chemical reactions, chemotaxis(?), etc.) a priori/analytical knowledge of blowup times is known for few model problems only a general enough error estimation framework could provide insight for interaction of non-linearities with other phenomena, such as advection, interfaces,etc. 4
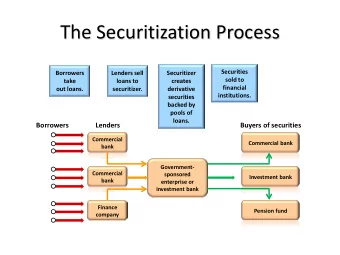
Mass transfer through semi-permeable membranes We consider a number of solutes subject to: diffusion and advection on both sides of the membrane nonlinear reactions with other solutes mass transfer across the membrane (red = linear, green = nonlinear) 5
Cargo · Imp concentration in cell signal transduction 6
Simpler model problem... Consider advection-diffusion-reaction PDE problem on a single domain Ω ⊂ R 2 : ∂ t u − κ∆ u + a · ∇ u + f ( u ) = 0 in Ω × (0 , T ], u = 0 on ∂Ω × (0 , T ], u ( · , 0) = u 0 in Ω, with f ( u ) = − u 2 , κ > 0. analytical results on blowup times ? effect(s) of advection w.r.t. to blowup? inclusion of interfaces in the mix? (ongoing...) For accessibility, in this talk, I shall mostly discuss the even simpler problem: ∂ t u − ∆ u = u 2 in Ω × (0 , T ], u = 0 on ∂Ω × (0 , T ], u ( · , 0) = u 0 in Ω, Aim Estimation of blowup time & space-time error control near blowup 7
Blowup detection & error control A case for adaptivity: Extremely fine (space-time) local resolution needed to approach blowup time “Standard” a priori error analysis & uniform meshes: at time t = T blowup − ε , constants O( e 1 /ε ) appear in bounds. ε → 0... Problem of missing the blowup! Dominant approach in the literature: rescaling/use of PDE ‘similarity’ properties to ( r -)adapt/rescale discretisation parameters. Nakagawa (’75), Berger & Kohn (’89), Stuart & Floater (’90), Tourigny & Sanz-Serna (’92), Budd, Huang & Russell (’96) ... Approach Construction of adaptive algorithms via rigorous a posteriori error estimates Limited literature on a posteriori error control & adaptivity in this context. Karakashian & Plexousakis (’96), Kyza & Makridakis (’11) Conditional a posteriori error estimates: final estimates hold under some computationally verifiable conditions 8
Step back to ODEs... ODE initial value problem: find u : [0 , T ] → R such that du dt = f ( u ) := u p , in (0 , T ] , u (0) = u 0 , with N ∋ p ≥ 2, so that the solution blows up in finite time, say T ∗ . Three different one step schemes: set U 0 := u 0 ; for k = 1 , . . . , N , solve for U k : U k − U k − 1 = F ( U k − 1 , U k ) , τ k with F one of the following three classical approximations of f : F ( U k − 1 , U k ) = f ( U k − 1 ) , Explicit Euler F ( U k − 1 , U k ) = f ( U k ) , Implicit Euler F ( U k − 1 , U k ) = 1 U k − 1 + τ k f ( U k − 1 ) f ( U k − 1 ) + f � � �� RK2/Improved Euler . 2 9
An a posteriori error estimate Let U : [0 , T ] → R p/w linear interpolant of { U k } at t k , viz U ( t ) := ℓ k − 1 ( t ) U k − 1 + ℓ k ( t ) U k , t ∈ ( t k − 1 , t k ] , Hence, on each interval ( t k − 1 , t k ], we have dU dt = F ( U k − 1 , U k ) . Therefore, on each time interval ( t k − 1 , t k ], the error e := u − U satisfies p f ( j ) ( U ) de e j − F ( U k − 1 , U k ) , � dt = f ( u ) − F ( U k − 1 , U k ) = f ( U ) + f ′ ( u ) e + j ! j =2 or, setting η k := f ( U ) − F ( U k − 1 , U k ), we have p f ( j ) ( U ) de � e j − 1 � f ′ ( U ) + � dt = η k + e . j ! j =2 10
An a posteriori error estimate Gronwall’s inequality, therefore, implies | e ( t ) | ≤ H k ( t ) G k φ k , � t � � t k p | f ( j ) ( U ) | � | e | j − 1 d s � � � t k − 1 | f ′ ( U ) | d s with H k ( t ) := exp , G k := exp , j ! t k − 1 � t k j =2 φ k := | e ( t k − 1 ) | + and t k − 1 | η k | d s . Theorem (Conditional error estimate) For k = 1 , . . . , N, the following a posteriori estimate holds: t ∈ [ t k − 1 , t k ] | e ( t ) | ≤ δ k G k φ k , max provided that δ k > 1 is chosen so that p � t k | f ( j ) ( U ( s )) | � ( δ k G k φ k ) j − 1 d s − log( δ k ) = 0 . j ! t k − 1 j =2 11
Two algorithms: 1 Algorithm 1 ODE Algorithm 1 1: Input: f , F , u 0 , τ 1 , tol . 2: Compute U 1 from U 0 . Z t 1 3: while t 0 | η 1 | d s > tol do η k := f ( U ) − F ( U k − 1 , U k ) τ 1 ← τ 1 / 2. 4: Compute U 1 from U 0 . 5: Absolute tolerance: tol 6: end while 7: Compute δ 1 . 8: Set k = 0. | T blowup − T final | ∼ N − r 9: while δ k +1 exists do k ← k + 1. 10: τ k +1 = τ k . 11: Compute U k +1 from U k . 12: Z t k +1 Method p = 2 p = 3 | η k +1 | d s > tol do while Implicit Euler r ≈ 0 . 66 r ≈ 0 . 79 13: t k Explicit Euler r ≈ 1 . 35 r ≈ 1 . 60 τ k +1 ← τ k +1 / 2. 14: Compute U k +1 from U k . Improved Euler r ≈ 1 . 2 r ≈ 1 . 48 15: end while 16: Compute δ k +1 . 17: 18: end while 19: Output: k , t k . 12
Two algorithms: 2 Algorithm 2 ODE Algorithm 2 1: Input: f , F , u 0 , τ 1 , tol . 2: Compute U 1 from U 0 . Z t 1 t 0 | η 1 | d s > tol do 3: while η k := f ( U ) − F ( U k − 1 , U k ) τ 1 ← τ 1 / 2. 4: Compute U 1 from U 0 . 5: 6: end while Relative tolerance: G k +1 ∗ tol 7: Compute δ 1 . 8: tol = G 1 ∗ tol . | T blowup − T final | ∼ N − r 9: Set k = 0. 10: while δ k +1 exists do k ← k + 1. 11: τ k +1 = τ k . 12: Compute U k +1 from U k . 13: Method p = 2 p = 3 Z t k +1 Implicit Euler r ≈ 1 . 00 r ≈ 1 . 00 while | η k +1 | d s > tol do 14: Explicit Euler r ≈ 1 . 45 r ≈ 1 . 43 t k τ k +1 ← τ k +1 / 2. 15: Improved Euler r ≈ 2 . 03 r ≈ 2 . 03 Compute U k +1 from U k . 16: end while 17: Compute δ k +1 . 18: tol = G k +1 ∗ tol . 19: 20: end while 21: Output: k , t k . 13
Back to PDEs: time semi-discretisation 0 := t 0 < t 1 < · · · < t N =: T partition of [0 , T ], τ k := t k +1 − t k , Implicit–Explicit (IMEX) Euler method: find U k ∈ H 1 0 ( Ω ), k = 0 , 1 , . . . , N − 1: U k +1 − U k − ∆ U k +1 = f ( U k ) , with U 0 = u 0 τ k Why IMEX implicit on diffusion ⇒ stability explicit on nonlinear reaction ⇒ advantageous approximation near blowup 14
Error equation Let U : [0 , T ] → H 1 0 ( Ω ) linear interpolant of { U k } k . Let e := u − U . Then, for f ( u ) = u 2 , we have ∂ t e − ∆ e = 2 Ue + e 2 + r k +1 + ( t k +1 − t )( U k +1 − U k ) /τ k . � f ( U ) − f ( U k ) � in ( t k , t k +1 ] with r k +1 := Energy estimate: d dt � e ( t ) � 2 + �∇ e ( t ) � 2 ≤ 4 � U ( t ) � L ∞ � e ( t ) � 2 + 2 � e 2 , e � + � r k +1 ( t ) � 2 − 1 Using � e 2 , e � ≤ � e � L ∞ � e � 2 , Gronwall’s inequality gives � T � t k +1 � N − 1 0 ≤ t ≤ T � e ( t ) � 2 ≤ exp � � � r k +1 ( t ) � 2 max 2 [2 � U ( t ) � L ∞ + � e ( t ) � L ∞ ] d t − 1 d t 0 t k k =0 Is a fully a posteriori bound possible from this? Behaviour of the constant in the run up to blowup? 15
Exponent growth (Kyza & Makridakis (’11)) Gronwall exponent: � T 2 � U ( t ) � L ∞ + � e ( t ) � L ∞ dt 0 1 On run up to blowup time: || u ( t ) || L ∞ ∼ (Merle & Zaag (’00)) ( T blowup − t ) We can infer that we also have, approximately, 1 || U ( t ) || L ∞ , � e ( t ) � L ∞ ∼ ( T blowup − t ) Hence, at T := T blowup − ε, ε > 0, the exponent scales like � T blowup − ε 1 T blowup − t dt = ln( T blowup ) ε 0 and, thus, the Gronwall constant scales like � � T blowup − ε 1 ∼ C ( T blowup ) � exp T blowup − t dt ε q 0 i.e., polynomial growth w.r.t ε ! Challenge: Leads to practical algorithm? 16
Time-discrete scheme a posteriori bound of (Kyza & Makridakis (’11)) fixed point arguments + semigroup theory = ⇒ a posteriori estimate Conditional a posteriori error estimates � t k +1 N − 1 � T L ∞ ( L ∞ ): � e � L ∞ ( L ∞ ) ≤ e 1 / 8+4 0 � U ( s ) � L ∞ d s � � r k +1 ( s ) � L ∞ d s t k k =0 N − 1 � t k +1 � T 0 ≤ t ≤ T � e ( t ) � 2 ≤ e 1 / 8+4 � L ∞ ( L 2 ): 0 � U ( s ) � L ∞ d s � r k +1 ( s ) � 2 max − 1 d s t k k =0 provided τ k are chosen so that N − 1 � t k +1 � r k +1 ( s ) � L ∞ d s ≤ 3 1 � T � e 4 0 || U ( s ) || L ∞ d s 16 ρ, with ρ < 16 T t k k =0 ր Global condition! efficient time-adaptive algorithm? – More local conditions? For fully-discrete L ∞ -norm a posteriori bounds for resp. elliptic problem are needed in this framework. growth range u p , p > 1. 17
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.