Accelerating ADAS with Open Source
Introduction • Mikko Hurskainen - ミッコ フルスカイネン • Technical leadership positions in Nokia, Notava, Nomovok, Suunto, Link Motion • Now Technologist in Link Motion. Looking on future technologies. • Mission: making connected cars safe & secure
Link Motion We m a k e C O N N E C T E D C A R C O M P U T E R S w i t h H A R D WA R E - O S - A P P L I C AT I O N S 10 years & 200+ Focus on SECURITY with cost efficient Automotive software projects delivered performance Our HQ is in Finland 2002 2004 2006 2008 2009 2015 2011 2013
What’s ADAS ? Applications: Applications: Commuter • Applications: • Lane assist Efficient transport • Manually driven car • • Adaptive Cruise control Local concierge • • Collision avoidance Level 0 Level 1 Level 2 Level 3 Level 4 Level 5 No Driver Partial Conditional High Full Automation Assistance Automation Automation Automation Automation Applications: Applications: Applications: Reverse camera Automated parking Taxi service • • • Cruise control Highway cruiser Moving office space • • • Visualization Platooning “Ultimate IoT machine” • • • Classification: SAE
Trends & Role of OSS Enablement of functionality ADAS becoming mainstream with OSS Level 0 Level 1 Level 2 Level 3 Level 4 Level 5 No Driver Partial Conditional High Full Automation Assistance Automation Automation Automation Automation Platformisation of ADAS Need for openness systems & cost-efficiency
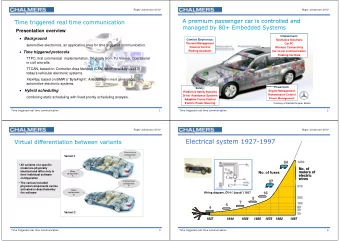
Linux for ADAS – why ? • Few years ago instrument cluster running Linux was thought not to be possible, now reality • ADAS becoming more complex – deeply embedded designs do not offer structure & re-use that well structured platforms, like Linux, can offer. • Developers prefer desktop platforms. • Linux is evolving into direction that it can be used for safety critical applications. Examples: NXP Linux, OSADL • Linux is POSIX compliant, possible to transfer results to other POSIX platforms. Also hybrid designs possible.
Autonomous Driving Biggest challenge: how to ensure car behaves correctly in ALL situations ? Answer is Open Source: by making algorithms open those can be tested by large community
OSS Toolbox for ADAS Algorithms New components OSS ADAS Platform OSS SW / communities Tools, testbench, Products drivers, platform, architecture, Automotive Platforms process, community Lower cost & faster time-to- market
ISO 26262 Safety based view of the system ASIL Levels A B C D ASIL = Severity x (Exposure x Controllability) ASIL = Automotive Safety Integrity Level (ISO 26262)
Process Compliancy Open Source vs ISO 26262 process • Rigorous reviews • No controlled process • Adherence to good coding • No responsible conventions persons • Well structured • Lack of testing software coverage • External reviews • Lack of design documentation • Known-to-work designs Need to also take account cyber security (eg SAE J3061)
OSS ASIL Maturization Developers Community Maturization Product Product development Stable release ASIL pre-qualified ASIL qualified by the release by product by development maturization company community community Examples: RHEL, OSADL
Technologies Need more: Sensing • Connectivity • Fusion • ADAS • components Testbenches • Simulation • BlueZ Auditing • Security •
Evolutionary: OSS Rear Vision Camera https://github.com/openautocam Visual guidance SAE L0 ASIL A Sensory guidance Moving object Collision detection recognition Braking Visualization Collision detection L1 B Drive train control L2 C Emergency brake
Revolutionary: ADAS Processor Connectivity • ADAS processor as brains of a car • Connected to vision, sensors, Camera Cluster & connectivity, Infotainment actuators Radar ADAS processor • Linux as a base instead of embedded system Drivetrain LIDAR
Hybrid Designs ASIL A / B ASIL A Cluster & Safety Infotainment Cluster / Critical Infotainment SW Microkernel Drive Control ASIL B+ ASIL C / D
Less, but more Powerful computers
What’s needed ? Co Components Co Community V2X, Sensing, Co-development, Controller information Ex Examples Pr Process Reverse camera, ISO 26262 cruise control compliant
Thank you ! ありがとうございます
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries