TAMPERE UNIVERSITY OF TECHNOLOGY Mathematics ——– A Modified Kalman Filter for Hybrid Positioning Tilastopäivät 2007 Simo Ali-Löytty . – p.1/15
Outline Motivation Problem Mathematical background Example Some results Conclusion . – p.2/15
Not enough measurements for unique solution. . . . – p.3/15
. . . restrictive information is necessary. . – p.4/15
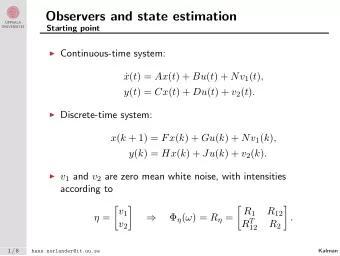
Combine restrictive information and Kalman-type filters? Restrictive information tells that state is inside some area. For example sector information. Kalman-type filters are linear filters which approximate only first two moments of distribution. x + = ˆ x − + K( y − ˆ ˆ y ) P + = P − − KP y K T For example: Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF). . – p.5/15
K-type filter approximates Bayes filter Initial state: x 0 Motion model: x k +1 = f ( x k ) + w k Measurement model: y k = h ( x k ) + v k state model and past meas. current meas. � �� � � �� � p ( y k | x k ) p ( x k | y 1: k − 1 ) p ( x k | y 1: k ) = � p ( y k | x k ) p ( x k | y 1: k − 1 ) dx k � �� � normalization x + k , P + K-type filters x k | y 1: k ≈ N(ˆ k ) . . – p.6/15
Posterior mean and covariance? χ A ( x ) p prior ( x ) p posterior ( x ) = χ A ( x ) p prior ( x ) dx , � where x prior ∼ N( µ prior , Σ prior ) . Base 500 m station . – p.7/15
Approximate restrictive area χ A ′ ( x ) p prior ( x ) p posterior ( x ) ≈ χ A ′ ( x ) p prior ( x ) dx , � where A ⊂ A ′ , A ′ = { x || A x − A x mid | ≤ α } and AΣ prior A T = I . Base 500 m station . – p.8/15
Posterior mean and covariance µ post = µ prior + Σ prior A T ǫ Σ post = Σ prior − Σ prior A T ΛAΣ prior , where „ « „ « − upi 2 − lowi 2 exp − exp ǫ = � n Base 2 2 500 m i =1 e i station √ 2 π (Φ( up i ) − Φ( low i )) Λ = diag( δ ) + diag( ǫ ) diag(A µ post − A x mid ) , „ « „ « − upi 2 − lowi 2 exp +exp δ = � n 2 2 i =1 α i e i . √ 2 π (Φ( up i ) − Φ( low i )) . – p.9/15
True track EKF EKF with restrictive info Start Start 500 m 500 m . – p.10/15 Base station Base station
Simulation variances: Base station range meas.: 80 2 m 2 Pseudorange meas.: 20 2 m 2 Delta pseudorange meas.: 2 2 m 2 s 2 . – p.11/15
0-2 base stations: BOX-solver is better than EKF 100 simulations: < 50m Time Err. Err. Err. Inc. ∝ 95 % % % µ Solver ref EKF 1 393 358 1356 11 28.1 BOX ⋆ 1 314 253 669 3 0.1 EKFBOX 2 192 126 625 19 7.7 SMC 74 145 17 436 25 0.2 ⋆ uses only restrictive info. . – p.12/15
Suburban: EKFBOX is almost as accurate as SMC < 50m Inc. Time Err. Err. Err. ∝ 95 % % % µ Solver ref BOX 1 285 279 644 5 0.7 EKF 1 76 46 255 60 2.1 EKFBOX 2 60 23 195 63 0.5 SMC 50 53 4 166 66 0.1 . – p.13/15
True track EKF Conclusion EKF with restrictive info The new algorithm Uses restrictive information Gives better results (accuracy, consistency) Is fast to compute Start Start 500 m 500 m Base station Base station . – p.14/15
True track EKF Conclusion EKF with restrictive info The new algorithm Uses restrictive information Gives better results (accuracy, consistency) Is fast to compute Thank you for your attention! Questions? Start Start 500 m 500 m http://math.tut.fi/posgroup/ Base station Base station . – p.15/15
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries