(3+)D Optical Engineering Input volume More information to the - PowerPoint PPT Presentation
(3+)D Optical Engineering Input volume More information to the user Optical elements, + Digital micro-actuators, processing smart pixels in Dave Bradys group, circa ~98-99... co-consipators: Bob Plemmons, Sudhakar Prasad, the late
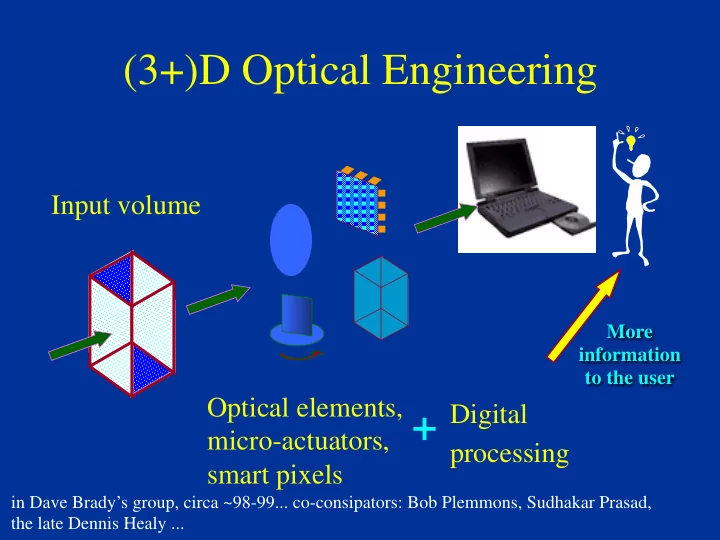
(3+)D Optical Engineering Input volume More information to the user Optical elements, + Digital micro-actuators, processing smart pixels in Dave Brady’s group, circa ~98-99... co-consipators: Bob Plemmons, Sudhakar Prasad, the late Dennis Healy ...
Confocal microscope with volume holographic filter The volume hologram acts as a depth-selective object filter through the beam Bragg pinhole effect. splitter Barbastathis, Balberg, and Brady Opt. Let . 24 (12) 811-813, 1999. Intensity detector Hologram does not Matched filtering is diffract 100% of the 3D scanning is still better suited to light ⇒ potential required to acquire the propagation properties entire object photon collection of light deficiency in Dave Brady’s group, circa ~98-99... co-consipators: Bob Plemmons, Sudhakar Prasad, the late Dennis Healy ...
The ¡Duke ¡Imaging ¡and ¡Spectroscopy ¡Program ¡ 3
Compressive phase retrieval George Barbastathis, 1,2,3 Yi Liu, 2 Wensheng Chen, 3 Lei Tian, 5 Jon Petruccelli, 6 Zhengyun Zhang, 3 Shakil Rehman, 3 Chen Zhi, 3 Justin W. Lee, 4 Adam Pan 4 1 University of Michigan - Shanghai Jiao Tong University Joint Institute 中国;上海市; 闵 行区;上海交通大学密西根大学学院 Massachusetts Institute of Technology 2 Department of Mechanical Engineering 3 Singapore-MIT Alliance for Research and Technology (SMART) Centre 4 Health Sciences and Technology Program 5 University of California, Berkeley 6 State University of New York, Albany
Today’s talk is about • Compressive measurements (sparsity priors) • Coherent light • Digital holography and particle localization • Partially coherent light • Phase space and mutual intensity retrieval
Today’s talk is about • Compressive measurements (sparsity priors) • Coherent light • Digital holography and particle localization • Partially coherent light • Phase space and mutual intensity retrieval
Compressive sensing: a simple-minded example • You drive by a farm with chicken and sheep and count a total of 8 legs: • how many chicken and sheep are there? • underdetermined - need another equation like “the total number of heads I count is...” • alternatively we can use a “sparsity prior” in the total # of types of animals. • either chicken or sheep
L2 Least squares solution (minimizes L2 on the line) (underdetermined) solution 4 � ✓ c � 2 � 8 � ◆ = s c 2 + s 2 = min s.t. NOT Sparse
L1 Compressive solution (minimizes L1 on the line) (underdetermined) solution 4 � ✓ c � 2 � 8 � ◆ = s | c | + | s | = min s.t. Sparse Generally, of the form (0 , . . . , 0 , ξ , 0 , . . . , 0)
Sparse spiky signals ➡ Native space: spiky signal ⇒ Nyquist sampling necessary ➡ Fourier space: smooth signal (superposition of a few sinusoids only) ⇒ fewer than Nyquist samples perhaps suffice ➡ To make up for missing samples: L1 minimization
Compressive sensing example Original signal with 3 spikes (total length=64) DFT measurements (# of samples=12) 1 1.5 DFT 1 samples 0.5 0.5 0 0 − 0.5 − 0.5 − 1 − 1 − 1.5 0 10 20 30 40 50 60 0 10 20 30 40 50 60 Conventional (L2) reconstruction Compressive (L1) reconstruction 0.15 1 0.1 0.5 0.05 ˆ ˆ f = argmin f k f k 2 f = argmin f k f k 1 0 0 − 0.05 F − 1 y red = F − 1 f F − 1 y red = F − 1 f s.t. s.t. − 0.1 − 0.5 − 0.15 − 0.2 − 1 0 10 20 30 40 50 60 0 10 20 30 40 50 60
Reconstruction success is subject to sparsity # Nyquist samples (# non-zero samples) / (# Nyquist samples) (# non-zero samples) / (# Nyquist samples) E. Candés, J. Romberg, and T. Tao, IEEE Trans. Info. Th. 52:489, 2006
The premise of compressive sensing • Nyquist criterion is too restrictive because it takes no priors into account • Most signals are sparse if expressed in an appropriate basis, e.g. • sparse in time - “spiky” • sparse in frequency - “beaty” • Far fewer samples than Nyquist may suffice to completely reconstruct, provided • the appropriate basis has been selected • sufficient signal mixing by the measurement operator • “measurement must be incoherent ” • Sparsity can then be enforced as a prior (regularizer) by L1 norm minimization E. Candès, J. Romberg, and T. Tao, IEEE Trans. Info. Th. 52:489, 2006 D. Donoho, IEEE Trans. Info. Th., 52:289, 2006 E. Candès and T. Tao, IEEE Trans. Info. Th., 52: 5406, 2006
Today’s talk is about • Compressive measurements (sparsity priors) • Coherent light • Digital holography and particle localization • Partially coherent light • Phase space and mutual intensity retrieval
The significance of phase Visible X-ray attenuation image phase-contrast image intensity image phase-contrast image (human breast cancer specimen) (F. Zernike, Science 121, 1955) (E. D. Pisano et al., Radiology 214, 2000) Phase is irrelevant! ρ ∝ n 2 − 1 Z Optical Path Length (OPL) φ ( x o ) = k n ( r )d l n 2 + 2 is relevant Γ Refractive index Density (and works with partially coherent light) temperature pressure ρ ∝ J. C. Petruccelli, et al, Opt. Express humidity 21:14430, 2013
Phase Imaging • Interferometric • Axial stack camera camera camera camera camera Y External reference A measuring D O phase (OPL) T object/particle localization camera Self-referenced (in-line digital holography)
Digital Holography: Measurement is “incoherent” ! Digital Sensor Collimating Object lens Spatial Filter Laser ➡ According to Statistical Optics, a digital hologram is formed by interfering spatially and temporally coherent beams (e.g. originating from a HeNe laser) ➡ According to Compressive Sensing theory, this measurement is “incoherent” because light scattered from the object spreads out over several pixels
Compressive Holography D. J. Brady, et al Opt. Express 17:13040, 2009.
Compressive localization Desirable accuracy: < 1 pixel Prior: sparsity of object(s) within the field of view
Localization examples Quantitative measurement Quantitative analysis of seal whisker motion of bubbles and plumes (multi-phase flows)
Emulating a 1D whisker: pin object Digital hologram across 1 row Yi Liu et al, Opt. Lett. 37:3357, 2012
Algorithm diagram Edge extraction Object Compressive Free-space reconstruction Propagation (TwIST) 0 ) = iu · z ( I ) z ( I Interpolated hologram edge’s spectrum zero-padding interpolation
Experimental result 1 pixel pixel size = 12 µm step size = 266 . 67 nm = 1 / 45pixel Yi Liu et al, to appear in : position of the left point of one row on the pin at each step Optics Letters issue Each step, tracing 7 rows. August 15, 2012
Experimental result 12000 theoretical position average position of pin’s left edge 10000 µ = 269 . 2nm σ = 11 . 7nm 8000 µ ex = 266 . 67nm Position [nm] Linear curve fitting 6000 from experimental data 200 Number of steps 150 4000 100 50 2000 0 − 266.7 0 266.7 533.4 800.1 800.1 Step size [nm] 0 0 5 10 15 20 25 30 35 40 45 Step Index
2D ¡object ¡localiza/on Hologram recording Object Multiply spiral phase mask in the Fourier domain Compressive holography Reconstruction Hologram of ring’s edges
Whisker vibration experiments Whisker hologram Whisker’s edges extracted Whisker’s motion reconstructed (pixel size = 10 μ m Acknowledgment Heather Beem, Michael Triantafyllou MIT
DH particle localization Imaging volume
DH particle localization Imaging volume
3D reconstruction of a plume (standard back-propagation) Original hologram 3D Reconstruction Particle size not to scale
Size distribution analysis size distribution a single frame from the holographic movie 104 measurement normal distribution fit 78 Reconstruction Count 52 26 140 0 100 120 140 160 Diameter (mm) 120 100 80 Mean diameter (mm) Std of diameter repeat for 60 each frame 40 20 0 0 2 4 6 Time lapse (s)
Sharpening the axial accuracy In ¡a ¡given ¡ z ¡plane: Sharp ¡features ¡mostly ¡due ¡to ¡in-‑focus ¡par9cles • Smooth ¡features ¡due ¡to: • Defocused ¡par9cles • Twin ¡image ¡ • Halo • Noise • This ¡essen9ally ¡states ¡a ¡sparsity ¡prior ¡on ¡the ¡ • edge ¡sharpness In this case we enforce sparsity by evolving the unknown radiance f to the steady state of a nonlinear diffusion equation ✓ ◆ ∂ f ( x , z ; τ ) F ( | r f | ) r f = α r · ∂τ | r f | F : flux function (notice F =1 ⇒ linear diffusion) L. Tian, J. C. Petruccelli, and G. Barbastathis, Opt. Lett. 37:4131, 2012.
Nonlinear diffusion: animation (movie shows output at every iteration) L. Tian, J. C. Petruccelli, and G. Barbastathis, Opt. Lett. 37:4131, 2012.
Sharpening the axial accuracy by nonlinear diffusion NLD in the transverse direction Flux 1.5 High flux In slowly varying regions 1.0 F Low flux Low flux near sharp near sharp edges 0.5 edges 0 1.0 2.0 3.0 s | r φ | | r φ | L. Tian, J. C. Petruccelli, and G. Barbastathis, Opt. Lett. 37:4131, 2012. J. Weickert, Lecture Notes in Computer Science, 1252:1, 1997.
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.