14. Stochastic Processes Introduction Let denote the random - PowerPoint PPT Presentation
14. Stochastic Processes Introduction Let denote the random outcome of an experiment. To every such outcome suppose a waveform X ( t , ) ( X t , ) is assigned. The collection of such X ( t , ) waveforms
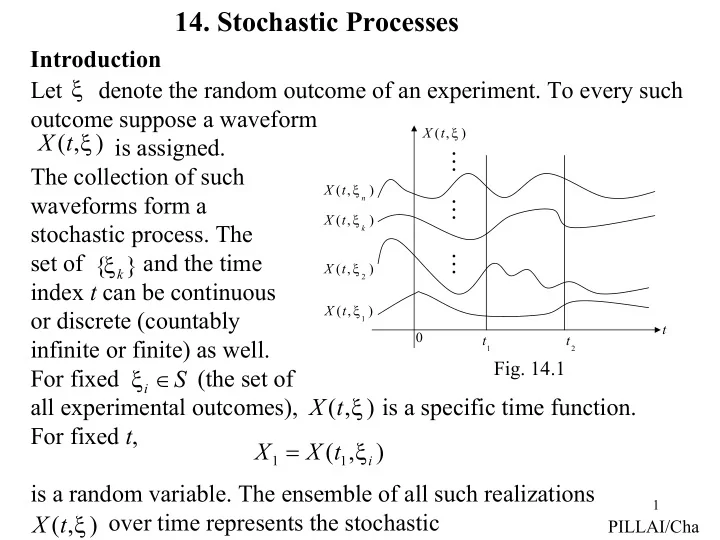
14. Stochastic Processes Introduction ξ Let denote the random outcome of an experiment. To every such outcome suppose a waveform ξ X ( t , ) ( ξ X t , ) is assigned. � The collection of such ξ X ( t , ) waveforms form a n � ξ X ( t , ) stochastic process. The k ξ set of and the time { k } � ξ X ( t , ) 2 index t can be continuous ξ X ( t , ) or discrete (countably 1 t 0 t t infinite or finite) as well. 1 2 Fig. 14.1 ξ i ∈ For fixed (the set of S ( ξ all experimental outcomes), is a specific time function. X t , ) For fixed t , = ξ X X ( 1 t , ) 1 i is a random variable. The ensemble of all such realizations 1 ( ξ over time represents the stochastic X t , ) PILLAI/Cha
process X ( t ). (see Fig 14.1). For example = ω + ϕ X ( t ) a cos( t ), 0 ϕ π where is a uniformly distributed random variable in (0,2 ), represents a stochastic process. Stochastic processes are everywhere: Brownian motion, stock market fluctuations, various queuing systems all represent stochastic phenomena. If X ( t ) is a stochastic process, then for fixed t , X ( t ) represents a random variable. Its distribution function is given by = ≤ F X ( x , t ) P { X ( t ) x } (14-1) Notice that depends on t , since for a different t , we obtain F X ( x , t ) a different random variable. Further dF ( x , t ) ∆ = (14-2) f ( x , t ) X dx X represents the first-order probability density function of the process X ( t ). 2 PILLAI/Cha
For t = t 1 and t = t 2 , X ( t ) represents two different random variables X 1 = X ( t 1 ) and X 2 = X ( t 2 ) respectively. Their joint distribution is given by = ≤ ≤ F X ( x , x , t , t ) P { X ( t ) x , X ( t ) x } (14-3) 1 2 1 2 1 1 2 2 and ∂ 2 F ( x x t t , , , ) (14-4) ∆ = f ( x x t t , , , ) 1 2 1 2 X 1 2 1 2 ∂ ∂ X x x 1 2 represents the second-order density function of the process X ( t ). Similarly represents the n th order density f X ( x , x , � x , t , t � , t ) 1 2 n 1 2 n function of the process X ( t ). Complete specification of the stochastic f X ( x , x , � x , t , t � , t ) process X ( t ) requires the knowledge of 1 2 n 1 2 n = for all and for all n . (an almost impossible task t i , i 1 , 2 , � , n in reality). 3 PILLAI/Cha
Mean of a Stochastic Process: = ∫ +∞ ∆ µ = (14-5) ( ) t E X t { ( )} x f ( , ) x t dx −∞ X represents the mean value of a process X ( t ). In general, the mean of a process can depend on the time index t . Autocorrelation function of a process X ( t ) is defined as = ∫∫ ∆ = * * R ( , t t ) E X t X { ( ) ( )} t x x f ( x x t t dx dx , , , ) (14-6) 1 2 1 2 1 2 1 2 1 2 1 2 XX X and it represents the interrelationship between the random variables X 1 = X ( t 1 ) and X 2 = X ( t 2 ) generated from the process X ( t ). Properties: 1. = = * * * R ( t , t ) R ( t , t ) [ E { X ( t ) X ( t )}] (14-7) 1 2 2 1 2 1 XX XX 2 > = (Average instantaneous power) R XX ( t , t ) E {| X ( t ) | } 0 . 2. 4 PILLAI/Cha
3. represents a nonnegative definite function, i.e., for any R XX ( t 1 t , ) 2 n { a } set of constants = i i 1 n n ∑∑ ≥ (14-8) * a a R ( t , t ) 0 . i j i j XX = = i 1 j 1 n ∑ ≥ = Eq. (14-8) follows by noticing that 2 E {| Y | } 0 for Y a X ( t ) . i i The function = i 1 = − µ µ (14-9) * C ( t , t ) R ( t , t ) ( t ) ( t ) 1 2 1 2 1 2 XX XX X X represents the autocovariance function of the process X ( t ). Example 14.1 Let T ∫ − = z X ( t ) dt . T Then T T ∫ ∫ = 2 * E [| z | ] E { X ( t ) X ( t )} dt dt 1 2 1 2 − − T T T T ∫ ∫ = (14-10) R ( t , t ) dt dt 5 1 2 1 2 − − XX T T PILLAI/Cha
Example 14.2 = ω + ϕ ϕ π X ( t ) a cos( t ), ~ U ( 0 , 2 ). (14-11) 0 This gives µ = = ω + ϕ ( t ) E { X ( t )} aE {cos( t )} 0 X = ω ϕ − ω ϕ = a cos t E {cos } a sin t E {sin } 0 , (14-12) 0 0 π 2 1 ∫ ϕ = ϕ ϕ = = ϕ since E {cos } cos d 0 E {sin }. π 2 0 Similarly = ω + ϕ ω + ϕ 2 R XX ( t , t ) a E {cos( t ) cos( t )} 1 2 0 1 0 2 2 a = ω − + ω + + ϕ E {cos ( t t ) cos( ( t t ) 2 )} 0 1 2 0 1 2 2 2 a = ω − cos ( t t ). (14-13) 0 1 2 2 6 PILLAI/Cha
Stationary Stochastic Processes Stationary processes exhibit statistical properties that are invariant to shift in the time index. Thus, for example, second-order stationarity implies that the statistical properties of the pairs { X ( t 1 ) , X ( t 2 ) } and { X ( t 1 + c ) , X ( t 2 + c )} are the same for any c . Similarly first-order stationarity implies that the statistical properties of X ( t i ) and X ( t i + c ) are the same for any c . In strict terms, the statistical properties are governed by the joint probability density function. Hence a process is n th -order Strict-Sense Stationary (S.S.S) if ≡ + + + f ( x , x , � x , t , t � , t ) f ( x , x , � x , t c , t c � , t c ) 1 2 n 1 2 n 1 2 n 1 2 n X X (14-14) for any c , where the left side represents the joint density function of = = = the random variables X X ( t ), X X ( t ), � , X X ( t ) and 1 1 2 2 n n the right side corresponds to the joint density function of the random ′ ′ ′ = + = + = + X X ( t c ), X X ( t c ), � , X X ( t c ). variables 1 1 2 2 n n A process X ( t ) is said to be strict-sense stationary if (14-14) is 7 = = t i , i 1 , 2 , � , n , n 1 , 2 , � and any c . true for all PILLAI/Cha
For a first-order strict sense stationary process , from (14-14) we have ≡ + f ( x , t ) f ( x , t c ) (14-15) X X for any c . In particular c = – t gives = f ( x , t ) f ( x ) (14-16) X X i.e., the first-order density of X ( t ) is independent of t . In that case +∞ ∫ = = µ (14-17) E X t [ ( )] x f x dx ( ) , a constant. −∞ Similarly, for a second-order strict-sense stationary process we have from (14-14) ≡ + + f ( x , x , t , t ) f ( x , x , t c , t c ) 1 2 1 2 1 2 1 2 X X for any c . For c = – t 2 we get ≡ − f ( x , x , t , t ) f ( x , x , t t ) (14-18) 1 2 1 2 1 2 1 2 X X 8 PILLAI/Cha
i.e., the second order density function of a strict sense stationary − t = τ process depends only on the difference of the time indices t . 1 2 In that case the autocorrelation function is given by ∆ = * R ( , t t ) E X t X { ( ) ( )} t 1 2 1 2 XX ∫∫ = τ = − * x x f ( x x , , t t dx dx ) 1 2 1 2 1 2 1 2 X ∆ = − = τ = − τ * R ( t t ) R ( ) R ( ), (14-19) 1 2 XX XX XX i.e., the autocorrelation function of a second order strict-sense stationary process depends only on the difference of the time τ = t − indices t . 1 2 Notice that (14-17) and (14-19) are consequences of the stochastic process being first and second-order strict sense stationary. On the other hand, the basic conditions for the first and second order stationarity – Eqs. (14-16) and (14-18) – are usually difficult to verify. In that case, we often resort to a looser definition of stationarity, known as Wide-Sense Stationarity (W.S.S), by making use of 9 PILLAI/Cha
(14-17) and (14-19) as the necessary conditions. Thus, a process X ( t ) is said to be Wide-Sense Stationary if = µ (i) E { X ( t )} (14-20) and (14-21) (ii) = − * E { X ( t ) X ( t )} R ( t t ), 1 2 1 2 XX i.e., for wide-sense stationary processes, the mean is a constant and the autocorrelation function depends only on the difference between the time indices. Notice that (14-20)-(14-21) does not say anything about the nature of the probability density functions, and instead deal with the average behavior of the process. Since (14-20)-(14-21) follow from (14-16) and (14-18), strict-sense stationarity always implies wide-sense stationarity. However, the converse is not true in general, the only exception being the Gaussian process. This follows, since if X ( t ) is a Gaussian process, then by definition = = = are jointly Gaussian random X X ( t ), X X ( t ), � , X X ( t ) 1 1 2 2 n n variables for any whose joint characteristic function t , 2 t � , t 10 1 n is given by PILLAI/Cha
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.