11.1 Ant Algorithms Dorigo et al. (1991 onwards), Hoos & Sttzle - PowerPoint PPT Presentation
T79.4201 Search Problems and Algorithms T79.4201 Search Problems and Algorithms 11.1 Ant Algorithms Dorigo et al. (1991 onwards), Hoos & Sttzle (1997), ... Inspired by experiment of real ants selecting the shorter of two paths
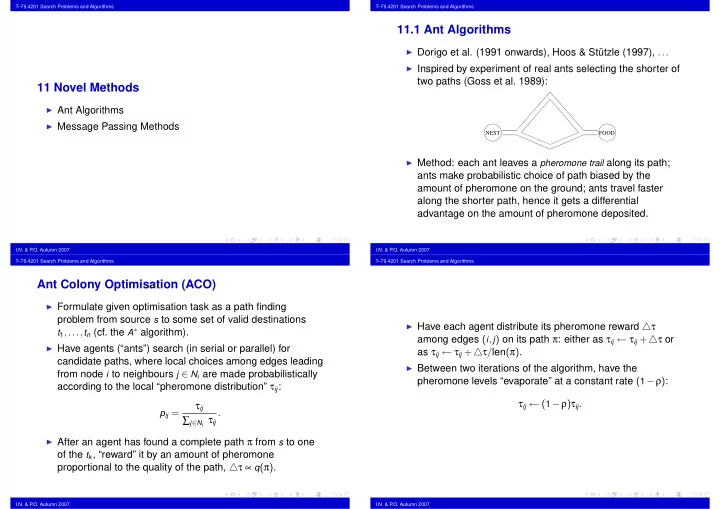
T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms 11.1 Ant Algorithms ◮ Dorigo et al. (1991 onwards), Hoos & Stützle (1997), ... ◮ Inspired by experiment of real ants selecting the shorter of two paths (Goss et al. 1989): 11 Novel Methods ◮ Ant Algorithms ◮ Message Passing Methods NEST FOOD ◮ Method: each ant leaves a pheromone trail along its path; ants make probabilistic choice of path biased by the amount of pheromone on the ground; ants travel faster along the shorter path, hence it gets a differential advantage on the amount of pheromone deposited. I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007 T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Ant Colony Optimisation (ACO) ◮ Formulate given optimisation task as a path finding problem from source s to some set of valid destinations ◮ Have each agent distribute its pheromone reward △ τ t 1 ,..., t n (cf. the A ∗ algorithm). among edges ( i , j ) on its path π : either as τ ij ← τ ij + △ τ or ◮ Have agents (“ants”) search (in serial or parallel) for as τ ij ← τ ij + △ τ / len ( π ) . candidate paths, where local choices among edges leading ◮ Between two iterations of the algorithm, have the from node i to neighbours j ∈ N i are made probabilistically pheromone levels “evaporate” at a constant rate ( 1 − ρ ) : according to the local “pheromone distribution” τ ij : τ ij ← ( 1 − ρ ) τ ij . τ ij p ij = . ∑ j ∈ N i τ ij ◮ After an agent has found a complete path π from s to one of the t k , “reward” it by an amount of pheromone proportional to the quality of the path, △ τ ∝ q ( π ) . I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007
T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms ACO motivation ACO variants ◮ Local choices leading to several good global results get Several modifications proposed in the literature: reinforced by pheromone accumulation. ◮ To exploit best solutions, allow only best agent of each ◮ Evaporation of pheromone maintains diversity of search. iteration to distribute pheromone. (I.e. hopefully prevents it getting stuck at bad local minima.) ◮ To maintain diversity, set lower and upper limits on the ◮ Good aspects of the method: can be distributed; adapts edge pheromone levels. automatically to online changes in the quality function q ( π ) . ◮ To speed up discovery of good paths, run some local ◮ Good results claimed for Travelling Salesman Problem, optimisation algorithm on the paths found by the agents. Quadratic Assignment, Vehicle Routing, Adaptive Network ◮ Etc. Routing etc. I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007 T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms An ACO algorithm for the TSP (2/2) An ACO algorithm for the TSP (1/2) ◮ The local choice of moving from city i to city j is biased ◮ Dorigo et al. (1991) according to weights: ◮ At the start of each iteration, m ants are positioned at τ α ij ( 1 / d ij ) β random start cities. a ij = ∑ j ∈ N i τ α ◮ Each ant constructs probabilistically a Hamiltonian tour π ij ( 1 / d ij ) β , on the graph, biased by the existing pheromone levels. where α , β ≥ 0 are parameters controlling the balance (NB. the ants need to remember and exclude the cities between the current strength of the pheromone trail τ ij vs. they have visited during the search.) the actual intercity distance d ij . ◮ In most variations of the algorithm, the tours π are still ◮ Thus, the local choice distribution at city i is: locally optimised using e.g. the Lin-Kernighan 3-opt procedure. a ij p ij = , ◮ The pheromone award for a tour π of length d ( π ) is ∑ j ∈ N ′ i a ij △ τ = 1 / d ( π ) , and this is added to each edge of the tour: where N ′ i is the set of permissible neighbours of i after τ ij ← τ ij + 1 / d ( π ) . cities visited earlier in the tour have been excluded. I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007
T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms 11.2 Message Passing Methods Belief Propagation (or the Sum-Product Algorithm ): Survey Propagation ◮ Pearl (1986) and Lauritzen & Spiegelhalter (1986). ◮ Braunstein, Mézard & Zecchina (2005). ◮ Originally developed for probabilistic inference in graphical ◮ Refinement of Belief Propagation to dealing with models; specifically for computing marginal distributions of “clustered” solution spaces. free variables conditioned on determined ones. ◮ Based on statistical mechanics ideas of the structure of ◮ Recently generalised to many other applications by configuration spaces near a “critical point”. Kschischang et al. (2001) and others. ◮ Remarkable success in solving very large “hard” randomly ◮ Unifies many other, independently developed important generated Satisfiability instances. algorithms: Expectation-Maximisation (statistics), Viterbi ◮ Success on structured problem instances not so clear. and “Turbo” decoding (coding theory), Kalman filters (signal processing), etc. ◮ Presently of great interest as a search heuristic in constraint satisfaction. I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007 T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Belief propagation Bias-guided search ◮ Method is applicable to any constraint satisfaction problem, If the biases β i could be computed effectively, they could be but for simplicity let us focus on Satisfiability. used e.g. as a heuristic to guide backtrack search: ◮ Consider cnf formula F determined by variables x 1 ,..., x n and clauses C 1 ,..., C m . Represent truth values as function BPSearch( F : cnf): ξ ∈ { 0 , 1 } . if F has no free variables then return val ( F ) ∈ { 0 , 1 } ◮ Denote the set of satisfying truth assignments for F as else ¯ β ← BPSurvey( F ); S = { x ∈ { 0 , 1 } n | C 1 ( x ) = ··· = C m ( x ) = 1 } . choose variable x i for which β i ( ξ ) = max ; ◮ We aim to estimate for each variable x i and truth value val ← BPSearch( F [ x i ← ξ ] ); ξ ∈ { 0 , 1 } the bias of x i towards ξ in S : if val = 1 then return 1 else return BPSearch( F [ x i ← ( 1 − ξ )] ); β i ( ξ ) = Pr x ∈ S ( x i = ξ ) . end if . ◮ If for some x i and ξ , β i ( ξ ) ≈ 1 , then x i is a “backbone” Alternately, the bias values could be used to determine variable variable for the solution space, i.e. most solutions x ∈ S share the feature that x i = ξ . flip probabilities in some local search method etc. I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007
T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Message passing on factor graphs A factor graph ◮ The problem of course is that the biases are in general Factor graph representation of formula difficult to compute. (It is already NP-complete to F = ( x 1 ∨ x 2 ) ∧ ( ¯ x 2 ∨ x 3 ) ∧ ( ¯ x 1 ∨ ¯ x 3 ) : determine whether S � = / 0 in the first place.) ◮ Thus, the BP survey algorithm aims at just estimating the a b c biases by iterated local computations (“message passing”) on the factor graph structure determined by formula F . ◮ The factor graph of F is a bipartite graph with nodes 1 , 2 ,... corresponding to the variables and nodes a , b ,... corresponding to the clauses. An edge connects nodes i and u if and only if variable x i occurs in clause C u (either 3 1 2 as a positive or a negative literal). I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007 T–79.4201 Search Problems and Algorithms T–79.4201 Search Problems and Algorithms Propagation rules ◮ Initially, all the variable-to-clause messages are initialised Belief messages to µ i → a ( ξ ) = 1 / 2 . ◮ Then beliefs are propagated in the network according to ◮ The BP survey algorithm works by iteratively exchanging the following update rules, until no more changes occur (a “belief messages” between interconnected variable and fixpoint of the equations is reached): clause nodes. ∏ ◮ The variable-to-clause messages µ i → a ( ξ ) represent the µ b → i ( ξ ) “belief” (approximate probability) that variable x i would b ∈ N i \ a µ i → a ( ξ ) = µ b → i ( ξ )+ ∏ ∏ µ b → i ( 1 − ξ ) have value ξ in a satisfying assignment, if it was not influenced by clause C a . b ∈ N i \ a b ∈ N i \ a µ a → i ( ξ ) = ∑ C a ( x ) · ∏ µ j → a ( x j ) ◮ The clause-to-variable messages µ a → i ( ξ ) represent the x : x i = ξ j ∈ N a \ i belief that clause C a can be satisfied, if variable x i is assigned value ξ . (Here notation N u \ v means the neighbourhood of node u , excluding node v .) ◮ Eventually the variable biases are estimated as β i ( ξ ) ≈ µ i → a ( ξ ) . I.N. & P .O. Autumn 2007 I.N. & P .O. Autumn 2007
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.