1 Discussion 3.2.3.2 Negotiations Simple concept, no conflict - PDF document
3.2.3.1 Cooperation by making 3.2.3. Cooperation Concepts information available Organizations employ one or several cooperation If we see the goal of cooperation as using results of concepts for doing cooperative problem solving. others to
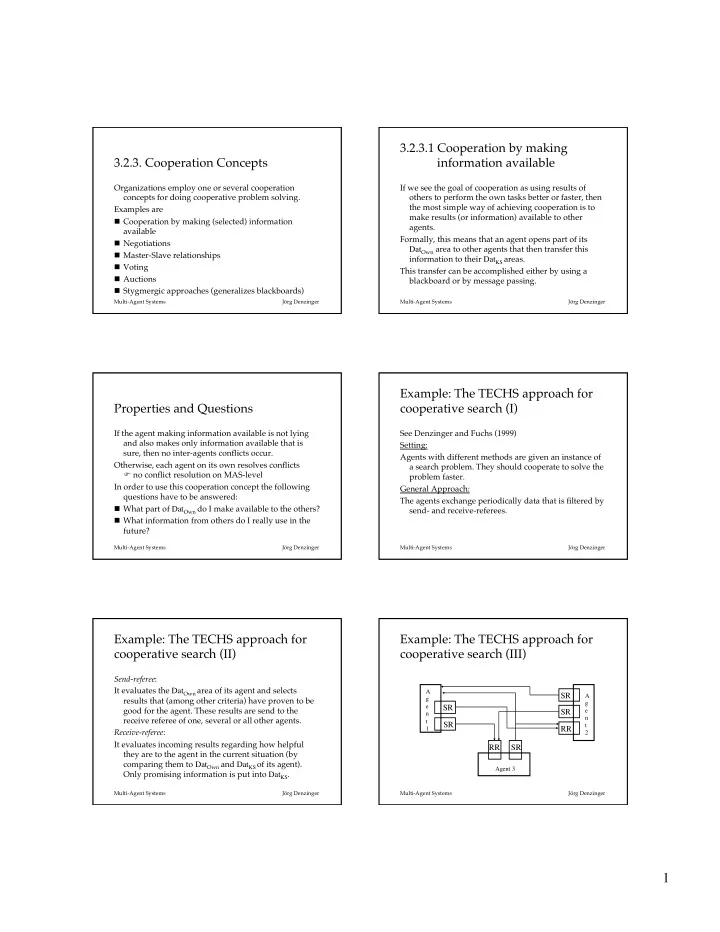
3.2.3.1 Cooperation by making � 3.2.3. Cooperation Concepts information available Organizations employ one or several cooperation If we see the goal of cooperation as using results of concepts for doing cooperative problem solving. others to perform the own tasks better or faster, then the most simple way of achieving cooperation is to Examples are make results (or information) available to other n Cooperation by making (selected) information agents. available Formally, this means that an agent opens part of its n Negotiations Dat Own area to other agents that then transfer this n Master-Slave relationships information to their Dat KS areas. n Voting This transfer can be accomplished either by using a n Auctions blackboard or by message passing. n Stygmergic approaches (generalizes blackboards) Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger Example: The TECHS approach for Properties and Questions cooperative search (I) If the agent making information available is not lying See Denzinger and Fuchs (1999) and also makes only information available that is Setting: sure, then no inter-agents conflicts occur. Agents with different methods are given an instance of Otherwise, each agent on its own resolves conflicts � a search problem. They should cooperate to solve the F no conflict resolution on MAS-level problem faster. In order to use this cooperation concept the following General Approach: questions have to be answered: The agents exchange periodically data that is filtered by n What part of Dat Own do I make available to the others? send- and receive-referees. n What information from others do I really use in the future? Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger Example: The TECHS approach for Example: The TECHS approach for cooperative search (II) cooperative search (III) Send-referee : It evaluates the Dat Own area of its agent and selects A SR A g results that (among other criteria) have proven to be g e SR good for the agent. These results are send to the SR e n n receive referee of one, several or all other agents. t SR t 1 RR Receive-referee : 2 It evaluates incoming results regarding how helpful RR SR they are to the agent in the current situation (by comparing them to Dat Own and Dat KS of its agent). Agent 3 Only promising information is put into Dat KS . Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger 1
Discussion 3.2.3.2 Negotiations ✚ Simple concept, no conflict handling necessary Negotiations are used to handle and resolve conflicts. ✚ Existing systems can be used Conflicts occur during cooperative problem solving n during definition, creation and distribution of ✚ Can lead to huge synergy effects (sub)tasks (point a)) - Cannot be applied in situations where conflicts need to be resolved globally ● by having different ways to define and create (sub)tasks - Can be rather communication intensive (big amounts of data can be sent around), if the two basic questions ● by having different possibilities to assign a are not answered well (sub)task to an agent n during the synthesis of the achieved results (point c)) Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger General Procedures (I) General Procedures (II) Negotiations use message passing to solve conflicts by Depending on the concrete organizational form, the initiating a dialog between agents. following procedure can vary. Starting point of negotiations is always a cooperation All forms require, that agents that detect a conflict action (message) of one agent providing one or inform the agent whose message caused the conflict. several other agents with a piece of information that Then (at least) one agent has to change its data in such a is in conflict with their individual data Dat Own or their way that it has no conflicting information anymore assumptions Dat KA . (or that its conflict is getting “ smaller ” ). The goal of negotiations is to resolve such conflicts by Then the other agents have to be informed about these changing the Dat Own and Dat KA areas (usually of all changes. involved agents). Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger General Procedures (III) Discussion As a result, the other agents may ✚ Rather general mechanism that can be used in almost all cases (at least as general idea as explained here). n also have no conflicting data anymore, ✚ Very similar to human behavior. n still have the old conflict, or - Can be rather communication intensive (many, rather n have new pieces of conflicting data. small messages to many agents). Then the last steps are repeated until all conflicts are - Some movement in goals of agents is necessary in resolved (or it becomes obvious that no solution is order to guarantee a compromise possible) - Cycle detection can become an issue Example: The FA/C approach (We will look at it more closely in 3.2.4.2) Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger 2
3.2.3.3 Master-Slave Relationships Typical Interaction scheme n Slave gets its orders from master Master-Slave Relationships between agents aim at making extensive communication unnecessary by n Slave executes the orders avoiding conflicts or by establishing clear priorities. n Slave reports back its results Such a relationship always exists between two agents, the master and the slave, but a master can have Either no conflicts occur or the master resolves them. several slaves and a slave can be master in other relationships (but not with its own master). No slave can have several masters. A master-slave relationship can be temporary or permanent. Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger Example: Master-Slave Teamwork (I) Example: Master-Slave Teamwork (II) Variant of Teamwork method by Bündgen, Göbel and n Slave now acts as referee and selects best results Küchlin (1996). found n Slave communicates found results back to master One agent is permanently assigned the supervisor role and therefore acts as the master to all other agents. n Master integrates slave ’ s results into its search state Interaction between Master and Slave: n Cycle is repeated until master or any slave finds a n Master communicates to slave its actual search state, solution a control strategy to use and a point in time to report Note: There are no team meetings, the master decides back when to get results from each agent individually. n Slave performs search, using control strategy, until Even if search state reached by a slave is better than the report time is reached one of the master, it does not survive. Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger Discussion 3.2.3.4 Voting Schemes ✚ Amount of communication rather low � Voting schemes as cooperation concept are well suited F efficient for MAS, in which the knowledge of the agents is very vague and sometimes even wrong, which would ✚ Well suited for hierarchical forms of organization lead to long negotiations to resolve conflicts. - In many applications, conflicts can simply not be By voting, not a compromise is generated but a solution avoided � (a fact) that is wished by most agents is accepted by F slaves may repeat work after master resolves � all from there on. conflict There are no discussions, only the possible solutions to - Masters can become bottlenecks (if they have too a problem (or conflict) have to be determined and many slaves) or they might be idle (if the task made available to all agents. distribution among agents is not good) Multi-Agent Systems Jörg Denzinger Multi-Agent Systems Jörg Denzinger 3
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.