1 Recent Advances in Reactive Planning: Past Approaches to Planning - PDF document
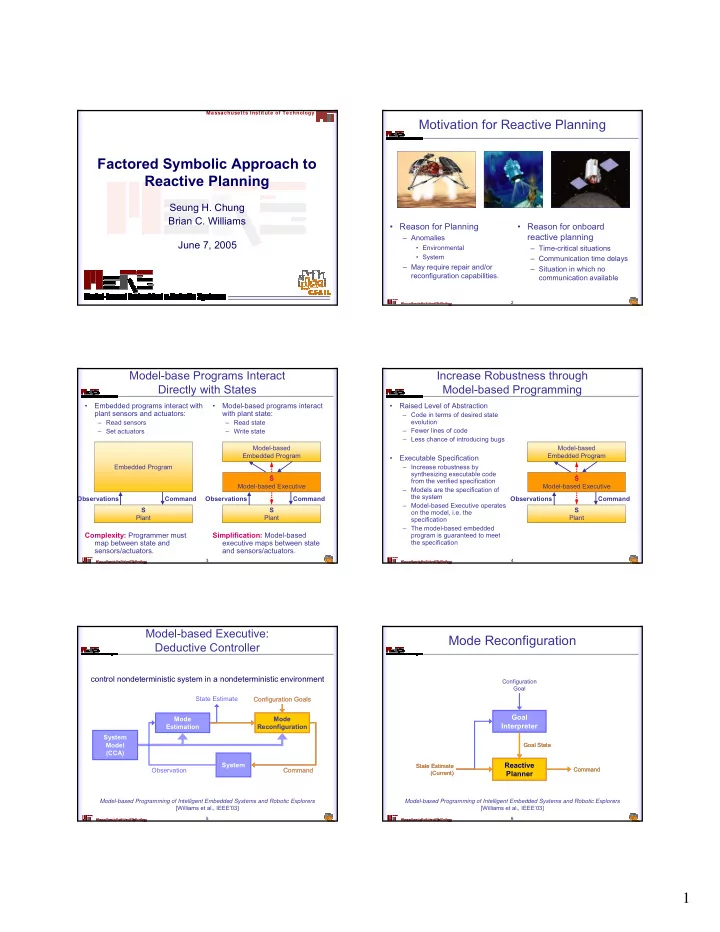
Massachusetts Institute of Technology Motivation for Reactive Planning Factored Symbolic Approach to Reactive Planning Seung H. Chung Brian C. Williams Reason for Planning Reason for onboard reactive planning Anomalies June 7,
Massachusetts Institute of Technology Motivation for Reactive Planning Factored Symbolic Approach to Reactive Planning Seung H. Chung Brian C. Williams • Reason for Planning • Reason for onboard reactive planning – Anomalies June 7, 2005 • Environmental – Time-critical situations • System – Communication time delays – May require repair and/or – Situation in which no reconfiguration capabilities. communication available 2 Model-base Programs Interact Increase Robustness through Directly with States Model-based Programming • Embedded programs interact with • Model-based programs interact • Raised Level of Abstraction plant sensors and actuators: with plant state: – Code in terms of desired state evolution – Read sensors – Read state – Fewer lines of code – Set actuators – Write state – Less chance of introducing bugs Model-based Model-based Embedded Program Embedded Program • Executable Specification Embedded Program – Increase robustness by synthesizing executable code Ŝ Ŝ from the verified specification Model-based Executive Model-based Executive – Models are the specification of the system Observations Command Observations Command Observations Command – Model-based Executive operates S S S on the model, i.e. the Plant Plant Plant specification – The model-based embedded Complexity: Programmer must Simplification: Model-based program is guaranteed to meet the specification map between state and executive maps between state sensors/actuators. and sensors/actuators. 3 4 Model-based Executive: Mode Reconfiguration Deductive Controller control nondeterministic system in a nondeterministic environment Configuration Goal State Estimate Configuration Goals Configuration Goals Goal Mode Mode Mode Interpreter Estimation Reconfiguration Reconfiguration System Model Goal State Goal State (CCA) Reactive Reactive System State Estimate State Estimate Observation Command Command Command Command (Current) (Current) Planner Planner Model-based Programming of Intelligent Embedded Systems and Robotic Explorers Model-based Programming of Intelligent Embedded Systems and Robotic Explorers [Williams et al., IEEE’03] [Williams et al., IEEE’03] 5 6 1
Recent Advances in Reactive Planning: Past Approaches to Planning BDD-based Universal Planning • Ordered Binary Decision Diagrams (BDD) • General-purpose Planner B = on – Compact representation of Boolean functions – Generates a sequence of commands that achieves the goal. – Efficient algorithms for operating on Boolean functions A = on – A sequence of commands lacks robustness within nondeterministic system and environment. • Symbolic Model Checking A' = on – Replanning is expansive. – Use of BDDs for model checking cmd A = on – Reduce the state explosion problem • Universal Planner – Has been very successful [Burch et al., IEEE’90] 1 0 – Maps all possible initial states to the appropriate actions. • Recognized the similarity of Symbolic Model Checking and – State explosion problem Planning [Cimatti et al., ECP’97] • Assume: – Reduce the state explosion problem through the use of BDDs. – x components – in average n number of states per component • BDD-based Universal planners have been developed: • Number of system states: O( n x ) – Must replan if the goal state changes. – Strong Plan, Strong Cyclic Plan, Optimistic Planning, Etc. 7 8 Recent Advances in Reactive Planning: Factored Symbolic Approach to Reactive Burton [Williams & Nayak, IJCAI97] Planning • Goal-directed plan : • Unify the two complementary approaches: 〈 Current State, Goal State 〉 → Action – Address the state space explosion problem at the global level through decomposition : divide-and-conquer – Address the state space explosion problem at the • Introduced a decomposition technique that enables subproblem level though BDD-based planning subgoal serialization (i.e. in essence, applies a divide-and-conquer approach to reactive planning). • Extend the decomposition technique of [Williams & – Mitigate the state space explosion problem. Nayak, IJCAI97] to problems with interdependent – Enable a compact encoding of a goal-directed plan. components. • Only applicable to a limited subset of a planning problems (i.e. cannot generate a plan for a system • Extend the BDD-based Universal planning with interdependent components). technique to generate a goal-directed plan. 9 10 Outline Telecommunication Subsystem Example • Spacecraft telecommunication system • Model: Concurrent automata Antenna • Decomposing the Problem: Transmitter Transmitter Amplifier Amplifier Concurrent Automata Compute Transition Decompose ( ΧΑ ) Dependency Bus Bus Α Computer Transition dependency graph Controller Controller Α Α Α Α • Reactive Plan for a Α Α Α Α Α Α Α Α Α Α Α Α Α Α Α Subproblem: Goal-directed Α Α Α Α Α Α Α Α Α Α Α Α Antenna plan Α Transmitter Transmitter Amplifier Amplifier • Reactive Plan for the Problem: • Computer Serialize Decomposed goal-directed – Controls the devices and sends data to the devices. (Topological Order) Compute DGDP • Bus Controller 1 1 plan Α GDP – Routes the commands and the data to the appropriate devices. GDP 2 2 Α Α Α Α • Executing the Plan GDP • Transmitter GDP 3 3 Α Α Α GDP GDP 4 4 – Generates a signal that corresponds to the data to be transmitted. Α Α GDP Α GDP • Amplifier – Amplifies the signal and transmits it to an antenna. 11 12 2
Concurrent Automata (CA) Interdependent Components • Turning the transmitter on or off can generate a noise (i.e. transient signal). Bus Controller Transmitter Amplifier Transmitter on • The transient signal may damage the on on on B = on B = on amplifier. A = off A = off cmd T = on cmd T = off B = on B = on B = on B = on cmd B = on cmd B = off A = off A = off T = on • The amplified transient signal may cmd A = off cmd T = on cmd T = off cmd A = on off damage other devices down stream of the amplifier. off off off • Constraint on the system: Amplifier on • Synchronous – Assume that each automaton performs a single state transition at each time – The amplifier must be turned off before B = on the transmitter can be turned on or off. step. B = on T = on cmd A = off – The transmitter must be turned on • Interleaved execution within a time step cmd A = on before the amplifier can be turned on. – A single main processor executes synchronous activities by interleaving. off – Devices are not synchronized. 13 14 BDD Encoding of a Concurrent Automaton Transition Dependency Graph 2 on B = on B = on Antenna Transmitter Amplifier T = on cmd A = off 1 cmd A = on Bus Computer Controller 3 off Transmitter Amplifier B = on B = on Antenna T = on • Transition Dependency Graph (TDG) A = on – Vertex: for each automaton A = on A = on – Edge ( v , u ) : if a transition of the automaton v is conditioned on the state of automaton u. A' = on • Use Strongly Connected Components (SCC) algorithm to find the cyclic A' = on A' = on A' = on components. • Compose SCC concurrent automata cmd A = on cmd A = on cmd A = on – New TDG is acyclic. – Serialize the subgoals in the inverse topological ordering. 1 0 1 15 16 Subgoal Serialization Composing Strongly Connected CA • Compose all automata into a single automaton 2 R SCC = ∧ R i Antenna Transmitter Amplifier 1 Bus Computer Controller Transmitter Amplifier 3 Transmitter Amplifier B = on Antenna cmd A = off on T on T on on on A off A B = on cmd A = on • Goal: B = on B = on B = on B = on B = on B = on – Bus Controller = on A = off A = off T = on cmd T = on cmd T = off cmd A = off cmd T = on cmd T = off cmd A = on – Transmitter/Amplifier #1 = (on, on) – Transmitter/Amplifier #2 = (off, off) off T off T off off • Solve each subgoal sequentially in the inverse topological order on A off A B = on cmd A = off 17 18 3
Recommend



More recommend
Explore More Topics
Stay informed with curated content and fresh updates.