Virtual Tests to Support Functional Safety of a Torque Vectored - PowerPoint PPT Presentation
Virtual Tests to Support Functional Safety of a Torque Vectored E-Motor Vehicle Richard Hurdwell & James Waters Virtual Testing Group September 2012 1 Outline Project Background and Objective The Vehicle Potential
Virtual Tests to Support Functional Safety of a Torque Vectored E-Motor Vehicle Richard Hurdwell & James Waters Virtual Testing Group September 2012 1
Outline • Project Background and Objective • The Vehicle • Potential Hazards and Risks • System Models • The Virtual Vehicle • Virtual Testing • Managing the results • HiL Testing • Acknowledgement 2
Background • Independent E-Drive to individual wheels is a powerful enabler for torque vectoring • Risk from incorrect wheel torque delivery needs algorithms to detect and mitigate the effect on the vehicle’s dynamics and controllability • Real testing of all of these possibilities and the effectiveness of mitigation is impractical • This case study demonstrates how ahead of prototype running, virtual testing in SiL, MiL and HiL developed the potential effectiveness of mitigation strategies 3
Project Objective • Test potential effects on the vehicle of faults in E-Propulsion torque delivery • Establish and develop effectiveness of mitigation strategies • Support vehicle integration ahead of prototype vehicle running 4
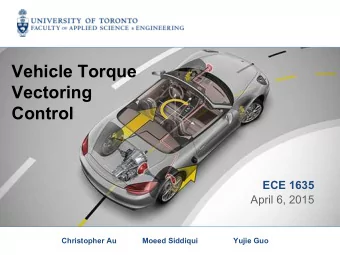
The Real Vehicle – Lotus 414e REEVolution • Torque Vectoring • Pair of axial flux electric motors per rear wheel • 0-60mph: <4.0 sec • Driving a Single Speed Gearbox per wheel • Vmax: 130mph • 17 kWh Battery Pack • EV only range: 30 miles • 35 kW Lotus Range Extender engine • Overall range 300 miles 5
Powertrain Layout • 4x Lotus Controllers Motor 1a Motor 1b Motor 2a Motor 2b • Pair of axial flux electric motors per rear wheel • Driving a Single Speed Gearbox per wheel 6
Potential Hazards and Risk Scenarios • Lotus Functional Safety Team identified Potential Hazards with ASIL ratings for 414e and restricted to its development on test tracks • Torque vectoring driveline creates particular hazards • Test runs were designed to exercise the defined hazards • Open and closed loop drivers tested to identify severity without driver interaction • Pass/Fail criteria agreed 7
Mitigation Strategies • Methods to identify faults and mitigate the effects on the vehicle were developed e.g. o Whole system into freewheel o Affected wheel into freewheel, other wheel unchanged o To counter one motor short circuit torque, apply drive torque on paired motor • Test routines to establish effectiveness of mitigation were developed 8
• Project Objective • The Vehicle • Hazards , Risks and Mitigation • System Models • The Virtual Vehicle • Virtual Testing • Managing the results • HiL Testing • Acknowledgement 9
The Virtual Components - System Models • Each Engineering Function group contributes it’s own models: o Vehicle (Dynamics CAE Group) o Motor and HV Battery (CAE and HEV Group) o Control and Mitigation Strategies (Control Systems and Integration Group) o ESP (Brake systems proprietary model) • Each model’s fidelity and plausibility validated as far as possible using real world testing 10
Virtual Vehicle Build & Commissioning • Assemble components into the Virtual Vehicle in IPG CarMaker for Simulink • Simulate the signal communication systems CANbus and IO • Add logic to simulate faults • Commission the virtual vehicle – fixing any cross system conflicts • Test drive the vehicle to develop systems and mitigation 11
• Project Objective • The Vehicle • Hazards , Risks and Mitigation • System Models • The Virtual Vehicle • Virtual Testing • Managing the results • HiL Testing • Acknowledgement 12
Automate Test Manoeuvres and Pass Criteria • Automating tests with test manager allows rapid testing and re testing • Simple Log files record only the key data • 61 automated test scenarios plus variations resulted in nearly 3000 individual test runs ����� �������� ������� �������� ���������� ������� ��������� ��� ��������� ��������� 13
Test Runs and Presentation of Results • Running the simulation is usually one of the shortest sections of work • Smart presentation of results enabled easy identification of failed tests • Mitigation strategies were refined or re-calibrated and the tests re-run 14
Example - Compare Mitigation On/Off Example Fault: • Left hand corner • 100 meter radius • Road Friction 1mu • Steady State • Fixed steer angle • Lateral Acceleration 8m/s • Outside Wheel Max Drive Torque • Inside Wheel Max Reverse Torque • Pass Criteria o � yaw rate <5 deg/s o path deviation <0.5 m 15
Comparison Mitigation On/Off Pre Test: Steady State Mitigation Off Mitigation On � Yaw Rate 0 deg/s, Deviation 0 � Yaw Rate 0 deg/s, Deviation 0 m 16
Comparison Mitigation On/Off 0 seconds: Fault Simulation Starts Mitigation Off Mitigation On � Yaw Rate 0 deg/s, Deviation 0 m � Yaw Rate 0 deg/s, Deviation 0 m 17
Comparison Mitigation On/Off 0.028 Seconds: Mitigation Disables Inverters Mitigation Off Mitigation On � Yaw Rate 1.03 deg/s, Deviation 0.02 m � Yaw Rate 1.03 deg/s, Deviation 0.02 m 18
Comparison Mitigation On/Off 0.032 Seconds: Un-Mitigated Car fails Yaw Criteria Mitigation Off Mitigation On � Yaw Rate 5.04 deg/s, Deviation 0.05 m � Yaw Rate -0.11 deg/s, Deviation 0.03 m 19
Comparison Mitigation On/Off 0.062 Seconds: Un-Mitigated Car fails Deviation Criteria Mitigation Off Mitigation On � Yaw Rate 86.5 deg/s, Deviation 0.51 m � Yaw Rate -1.03 deg/s, Deviation 0.05 m 20
Comparison Mitigation On/Off 0.91 Seconds: Un-Mitigated Car spins Mitigation Off Mitigation On � Yaw Rate 222.3 deg/s, Deviation 2.36 m � Yaw Rate -0.8 deg/s, Deviation 0.12 m 21
HiL Testing • IPG X-Pac 4 HiL rig was used to test algorithms in the real Lotus controllers • HiL also enables the virtual vehicle to “drive” individual or multiple parts of the real powertrain on the test bed 22
Summary • Demonstrated how virtual testing developed potential effectiveness of mitigation strategy • This was essential ahead of prototype running for safer and quicker vehicle development • Algorithms to detect and mitigate the effect of faults developed with initial calibration • Helped develop the testing schedule for the real vehicle • Proved the need and targets for fast acting mitigation to control incorrect drive torques 23
Acknowledgement This virtual testing process has been instrumental in the successful completion of a match funded collaborative research project “REEVolution” which was part funded by the UK’s Technology Strategy Board 24
Richard Hurdwell Please reply to: Chief Engineer Active Dynamics & Virtual Testing Job title: Telephone: +44 1953 608 424 Email: rhurdwell@lotuscars.com Website: lotuscars.com/engineering UNITED KINGDOM MALAYSIA USA CHINA 7 th Floor, New Jinqiao Tower Malaysia Sdn. Bhd. Lot G-5, Enterprise 3 Potash Lane 1254 N. Main Street Technology Park Malaysia Hethel, Norwich Ann Arbor No. 28 New Jinqiao Road, Pudong Lebuhraya Puchong-Sungai Besi NR14 8EZ MI 48104 Shanghai. PR CHINA 201206 Bukit Jalil. 57000 Kuala Lumpur Phone +44 (0) 1953 608423 Phone +1 734 995 2544 Phone +86 (21) 5030 9990 Phone +60 (3) 8996 7172 Eng-uk@lotuscars.com Eng-usa@lotuscars.com Eng-china@lotuscars.com Eng-asia@lotuscars.com 25
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.