Ultrasound Imaging Yao Wang Polytechnic University, Brooklyn, NY 11201 Based on J. L. Prince and J. M. Links, Medical Imaging Signals and Systems, and lecture notes by Prince. Figures are from the textbook except otherwise noted.
Lecture Outline • Ultrasound imaging overview • Ultrasound imaging system schematic • Derivation of the pulse-echo equation • Different ultrasound imaging modes • Steering and focusing of phased arrays • Doppler Imaging • Clinical applications EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 2
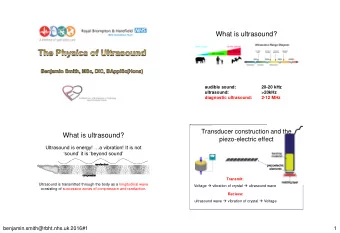
Ultrasound Imaging • Measure the reflectivity of tissue to sound waves • Can also measure velocity of moving objects, e.g. blood flow (Doppler imaging) • No radiation exposure, completely non-invasive and safe • Fast • Inexpensive • Low resolution • Medical applications: imaging fetus, heart, and many others EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 3
Schematic of an Ultrasound Imaging System EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 4
Functions of transducer • Used both as Transmitter And Receiver • Transmission mode: converts an oscillating voltage into mechanical vibrations, which causes a series of pressure waves into the body • Receiving mode: converts backscattered pressure waves into electrical signals EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 5
Single Crystal Transducer (Probe) (damping) EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 6
Pulse Echo Imaging • Transducer is excited for a short period, generating a narrowband short pulse • Detects backscattered wave (echo) generated by objects • Repeat the above process, with the interval between two input pulses greater than the time for the receiver to receive the echo from the deepest object (2 d_max/c) EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 7
Typical Transmit Pulse EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 8
Spectrum of the Transmit Pulse 1 ( ) j 2 π f t − j 2 π f t π = + n ( t ) cos 2 f t n ( t ) e e 0 0 e 0 e Product of a decaying envelop 2 1 and a sinusoidal function [ ] ⇔ N ( f ) * δ ( f − f ) + δ ( f + f ) e 0 0 2 ( ) 1 π n e ( t ) cos 2 f t [ ] = − + + N ( f f ) N ( f f ) 0 e 0 e 0 2 Narrow band (around f0) pulse EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 9
What is the Received Signal? • What is the received signal (backscattered signal) at the transducer ? • How is it related to the reflectivity in the probed medium? EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 10
A scatter at (x,y,z) The scattered signals reflects p(x,y,z;t); over all (x0’,y0’) leads generating to a voltage signal Each point (x0,y0) p_s(x0’,y0’;t;x,y,z) r(x,y,z;t), all due to a produces a single scatter at (x,y,z) pressure wave ' ' ( x 0 y , , 0 ) p(x,y,z,t;x0,y0) 0 p(x,y,z;t) is Wave superposition of above waves over all points on the transducer face Vibrating in z direction EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 11
Complex Signal Representation • We will represent the input signal as the Real part of a complex signal to simplify derivation EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 12
Derivation of the Pulse Echo Equation z − 1 • Pressure wave produced by point (x0,y0) = − p ( x , y , z , t ; x , y ) n ( t c r ) 0 0 0 2 r 0 (each point acts as a dipole rather than a monopole, ( ) ( ) 2 2 2 2 = − + − + r x x y y z Signal is strongest in the direction orthogonal to the 0 0 0 dipole) • Total pressure at (x,y,z) is superposition of above due to all x0,y0 in the transducer face = ∫∫ z − 1 p ( x , y , z , t ) s ( x , y ) n ( t − c r ) dx dy 0 0 0 0 0 2 r 0 = = s ( x , y ) 1 , if ( x , y ) in face; 0, otherwise • Reflected signal due to scatterer at (x,y,z) with reflectiveity R(x,y,z) is a spherical wave, with signal at transducer position x0’,y0’ 1 ' ' − 1 ' p s ( x , y , t ) = R ( x , y , z ) p ( x , y , z ; t − c r ) 0 0 0 ' r 0 • The generated electrical signal (voltage) depends on reflected signal at all points in the transducer z ∫∫ z/r0’ due to dipole pattern ' ' ' ' = r ( x , y , z , t ) K s ( x ' , y ' ) p ( x , y ; t ) dx dy 0 0 s ' r 0 0 0 0 0 z z ∫∫ ∫∫ − 1 − 1 ' ' ' = − − KR ( x , y , z ) s ( x ' , y ' ) s ( x , y ) n ( t c r c r ) dx dy dx dy 0 0 0 0 0 0 0 0 2 2 r ' r 0 0 0 0 ∫∫ = • The total response for scatters at all possible (x,y,z) r ( t ) r ( x , y , z , y ) dxdydz EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 13
Plane Wave Approximation φ − π j j 2 f t = n ( t ) n ( t ) e e 0 e − 1 − 1 − − − − φ − j 2 π f ( t − c r − c r ' ) 1 1 1 1 j − − = − − n ( t c r c r ' ) n ( t c r c r ' ) e e 0 0 0 0 0 e 0 0 Approximat ion : r ≈ r ' ≈ z 0 0 − − − 1 1 1 − − = − n ( t c r c r ' ) n ( t 2 c z ) e 0 0 e Also using t = 2 z/c in the exponent − 1 − 1 − 1 − j 2 π f ( t − c r − c r ' ) − j 2 π f c ( 2 z − r − r ' ) − jk ( z − r ) − jk ( z − r ' ) = = e 0 0 0 e 0 0 0 e 0 e 0 This approximation enables us to separate integration over x0,y0 and that over x0’,y0’ EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 14
Field Pattern and Pulse-Echo Equation (depends only on transducer face, not pulse) Basic pulse-echo signal equation • From all scatters, and considering attenuation in material with µ a : EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 15
Paraxial Approximation This is the same result that we would have got had we assumed that all points on the transducer act as spherical wave generators and receivers EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 16
Fresnel & Fraunhofer Approximation Near field boundary (NFB) Fresnel region Fraunhofer region Vibrating flat plate (far field, beam spreading) 2 D λ 4 Geometric approximation: Wave is confined in a cylinder EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 17
Fresnel and Fraunhofer Approximations (valid in Fresnel region) (further approximation, in far field) S(u,v): FT of s(x,y) EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 18
General Pulse-Echo Equation EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 19
Time Gain Compensation 2 ( ct ) = g ( t ) − µ ct e a EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 20
Envelope Detection • In A-mode of ultrasound imaging, the envelope of r_c(t) is detected and used as the output signal • e_c(t)=envelope of r_c(t) Since n(t) and q(x,y,z) depend only on the source, e_c(t) is affected by the reflectivity R(x,y,z) in the imaged body, or e_c(t) ~ R(0,0,z=ct/2) EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 21
Transducer Motion and Range Equation Previous result assumes the transducer is located at (0,0,0). When the transducer is at arbitrary (x0,y0), q(x,y,z) is changed to q(x-x0,y-y0,z) at (x0,y0,ct/2) EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 22
Geometric Approximation (Fresnel Region) With geometric approximat ion, we assume ~ = ≈ q ( x , y , z ) zq ( x , y , z ) s ( x , y ) Then ˆ j 2 kz = R ( x , y , z ) K R ( x , y , z ) e * * * h ( x , y , z ) z ~ 2 = h ( x , y , z ) s ( x , y ) n e c / 2 ~ = − − s ( x , y ) s ( x , y ) • If we ignore the e^{jkz} term, Received signal (envelope) at (x,y,t) is R(x,y,z) (z=tc/2) convolved with h • h(x,y,z) can be thought of as a blurring function. Its support region defines the resolution cell of the imaging system • With geometric approximation, the resolution cell has the same dimension as the transducer face in (x,y) plane, and the extend in z- direction = cT/2, if T is the length of the transmit pulse. EL5823 Ultrasound Imaging Yao Wang, Polytechnic U., Brooklyn 23
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries