Triangulations of Real Projective Space Combinatorial Approaches - PowerPoint PPT Presentation
Triangulations of Real Projective Space Combinatorial Approaches Sonia Balagopalan Institute of Mathematics Hebrew University s.balagopalan@gmail.com Plze, October 6, 2016 Equiangular Lines in Elliptic Space A question of Seidel Let E r
Triangulations of Real Projective Space Combinatorial Approaches Sonia Balagopalan Institute of Mathematics Hebrew University s.balagopalan@gmail.com Plzeň, October 6, 2016
Equiangular Lines in Elliptic Space A question of Seidel Let E r − 1 denote elliptic space of dimension r − 1. Think of this as the sphere S r − 1 with antipodal points identified. We say that a set of points in E r − 1 is equilateral if the (absolute) cosines of the pairwise angles between them (as vectors in R r ) are all equal. Problem [van Lint, Seidel (’65)]
Examples Example 0: E 1 ω ω 2 1 1 ω ω 2 Figure: The long diagonals of a regular hexagon.
Examples Example 1: E 2 3 2 1 6 5 4 4 5 6 1 2 3 Figure: The long diagonals of a regular icosahedron.
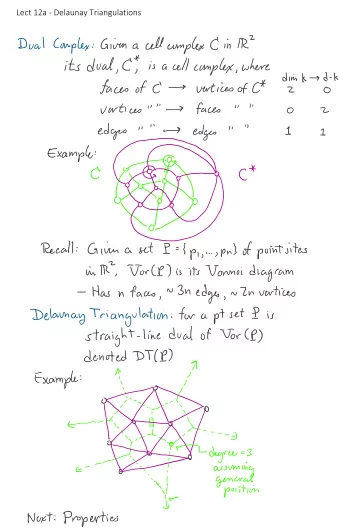
Motivation for our interest in this problem Projective space Real projective space of dimension d , R P d is defined as the sphere S d with antipodal points identified. ( x ∼ − x ) We are interested in triangulations of projective space. ◮ An abstract simplicial complex K is a collection of finite sets closed under taking subsets. ◮ Given a simplicial complex with vertex set V = v 1 , v 2 , v 3 , . . . , v n , we can define its geometric realization via the map v i �→ e i ∈ R d + 1 . ◮ A triangulation of R P d is a simplicial complex K whose geometric realization is homeomorphic to R P d . A natural question: What are the “smallest” triangulations of R P d ? Not much is known about this, or minimal triangulations in general.
Triangulations A fun example Consider the simplicial complex with facets consisting of two vertices each above and below the line of 5 disjoint copies of K 2 , such the no edge contributes more than one vertex. S 3 on 10 vertices with automorphism group Sym ( 5 ) × C 2 . Vertex links are symmetric triangulations of the cube.
A general framework for constructing triangulations of projective space ◮ Recall that R P d is the antipodal quotient of S d . ◮ We try to construct triangulated spheres which have antipodal quotients. Antipodal sphere Let T be a triangulated sphere. We say that T is antipodal if ◮ there is an involution σ on T with a fixed-point free action on the vertices V ( T ) . (We usually denote σ ( x ) = − x ). ◮ the graph-distance between v and σ ( v ) is at least 3 for all v ∈ V ( T ) . The last condition allows us to take the quotient T /σ without introducing “double edges”. It is easy to see that the problem of finding triangulations of projective space is the same as that of finding antipodal spheres.
Examples of antipodal spheres Example 0: E 1 ω − ω 2 − 1 1 ω 2 − ω Figure: The hexagon
Examples Example 1: E 2 3 2 1 − 6 5 4 − 4 − 5 6 − 1 − 2 − 3 Figure: Faces of the icosahedron Quotient is R P 2 6 . Its facets are the blocks of the unique 2 − ( 6 , 3 , 2 ) design.
The general example Barycentric subdivision of the simplex Let ∆ d denote the d -dimensional simplex with vertices v 1 , v 2 , . . . , v d + 1 . The (first) barycentric subdivision of ∆ d is the complex obtained by subdividing ∂ ∆ d at each of its proper faces. v 2 v 12 ◮ Antipodal ( d − 1 ) -sphere v 124 v 24 ◮ Each vertex a nonempty, proper v 4 v 1 v 14 subset of [ d + 1 ] v 234 v 123 v 23 ◮ 2 d + 1 − 2 vertices v 134 v 34 v 13 ◮ Each facet ∼ an ordering of [ d + 1 ] ◮ ( d + 1 )! facets v 3
State of the art on triangulations of R P d ◮ The above construction uses n = 2 d + 1 − 1 points to triangulate R P d . ◮ All known infinte families are exponential. ◮ Best known lower bound for R P d is n = � d + 2 � + 1 , d ≥ 3, due to 2 Arnoux, Marin (’91). ◮ We know better constructions for d = 4 , 5
Better Constructions Maximal equilateral point set in E 5 . van Lint, Seidel: Consider a two-coloured 6-dimensional hypercube Q 6 , with vertices {± 1 } 6 . Let S be the colour-class 6 � { ( x 1 , x 2 , . . . x 6 ) ∈ V ( Q 6 ) | x i = − 1 } . i = 1 S is an equilateral point set in E 5 of size 16. We use this configuration to construct a 4-dimensional antipodal sphere.
Antipodal S 4 on 32 vertices ◮ Let ˜ S be the lifting of S into R 6 , a set of 32 points on the standard S 5 . ◮ Write ˜ S as S 1 ⊔ S 3 ⊔ S 5 , where exactly i coordinates of S i are equal to − 1. ◮ We have | S 1 | = | S 5 | = 6 , | S 3 | = 20, these are orbits under the Sym ( 6 ) -action permuting the coordinates. ◮ We need to project the points of ˜ S into R 5 , i.e.the hyperplane � x = 0. ◮ Transform ( − 1 , 1 , 1 , 1 , 1 , 1 ) ∈ S 1 to ( − 5 , 1 , 1 , 1 , 1 , 1 ) , and ( 1 , − 1 , − 1 , − 1 , − 1 , − 1 ) ∈ S 5 to ( 5 , − 1 , − 1 , − 1 , − 1 , − 1 ) . √ ◮ S 3 is already in R 5 , but we could scale it by 5 to lie in the sphere √ of radius 30. ◮ Call the new vertex set V 32 . The boundary of the convex hull of V 32 is an antipodal sphere of dimension 4, with automorphism group C 2 × Sym ( 6 ) . ◮ This can be quotiented to obtain a triangulated R P 4 on 16 vertices.
Antipodal S 4 on 32 vertices Another approach ◮ Observe that V 32 is a two-angle set. The graph G 32 obtained by joining points in V 32 with positive dot product is the graph of our antipodal sphere. ◮ In fact, G 32 is just the halved 6-cube graph, a double cover of K 16 . ◮ In this case, as well as for d = 1 , 2, the sphere is a flag sphere and can be obtained by taking the clique complex of the graph. ◮ This can be quotiented to obtain a triangulated R P 4 on 16 vertices. The object we just constructed satisfies the theoretical lower bound on the number of vertices. It was first discovered via computer search by F.H. Lutz (’99).
R P 4 16 Remarks ◮ Sym ( 6 ) acts on R P 4 16 intransitively on its 6 + 10 vertices. ◮ The vertex-orbit of size 10 corresponds to the set of bisections of 6 points into 3 + 3 points. ◮ The action of Aut ( R P 4 16 ) is a “total” Sym ( 6 ) action. ◮ R P 4 16 “sits naturally in a neighbourhood of” the nicest 16-point biplane and the 22-point Witt design.
One more example Maximal equilateral point set in E 6 . van Lint, Seidel: Let M the incidence matrix of the Fano plane. 1 1 1 0 0 0 0 1 0 0 1 1 0 0 1 0 0 0 0 1 1 0 1 0 1 0 1 0 0 1 0 0 1 0 1 0 0 1 1 0 0 1 0 0 1 0 1 1 0 Consider the set S with elements the rows of M , but with each entry 1 replaced with ± 1. | S | = 56. Identifying x with − x gives an equilateral point set in E 6
R P 5 28 ◮ The “clique trick” does not work here. We just get the graph of an E 7 polytope. ◮ We split S into four subsets by the number of coordinates equal to − 1. ◮ Do a similar transformation as above: ( 1 , 1 , 1 , 0 , 0 , 0 , 0 ) �→ ( 20 , 20 , 20 , − 15 , − 15 , − 15 , − 15 ) and ( 1 , − 1 , − 1 , 0 , 0 , 0 , 0 ) �→ ( 24 , − 18 , − 18 , 3 , 3 , 3 , 3 ) ◮ Calculate the convex hull. We get an antipodal S 7 . ◮ R P 5 28 is not optimal. Lutz has discovered a 24-vertex example. ◮ Nevertheless our object has better symmetry. Sym ( 7 ) acting on the vertices and edges of K 7 , and just three orbits on the facets.
Open questions ◮ Does R P 21 276 exist? ◮ Known quadratic equiangular line families (with quadratic number of points) are too small. What is the right relaxation? ◮ Is it two-angle sets? k -angle sets for small k ? ◮ Spherical designs??
Thank you!
Recommend


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.