Toward the Sense of Touch in Snake Modular Robots for Search and - PowerPoint PPT Presentation
Toward the Sense of Touch in Snake Modular Robots for Search and Rescue Operations Juan Gonzlez-Gmez, Javier Gonzalez-Quijano, Houxiang Zhang, Mohamed Abderrahim Robotics Lab TAMS group Universidad Carlos III de Madrid University of
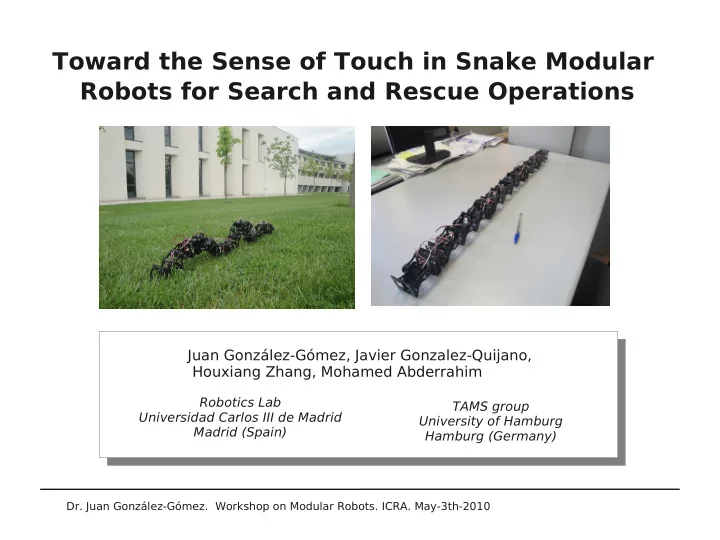
Toward the Sense of Touch in Snake Modular Robots for Search and Rescue Operations Juan González-Gómez, Javier Gonzalez-Quijano, Houxiang Zhang, Mohamed Abderrahim Robotics Lab TAMS group Universidad Carlos III de Madrid University of Hamburg Madrid (Spain) Hamburg (Germany) Dr. Juan González-Gómez. Workshop on Modular Robots. ICRA. May-3th-2010
Outline Outline 1. Introduction 2. Sense of touch 3. Mechanics 4. Experiments 5. Conclusions 2 A New Application of Modular Robot on Analysis of Caterpillar-like Locomotion
1.- Introduction Urban Search and Rescue Operations (I) ● Environment: ● Unstructured terrain ● Chaotic ● Pieces of rumble ● Priority: to find survivals quickly ● Robot properties: ● Versatility ● Flexibility ● Adaptability 3 Toward the sense of touch in Snake modular robots for search and rescue operations
1.- Introduction Urban Search and Rescue Operations (II) ● Snakes modular robots are very good candidates for search and rescue operations ● Small section ● Flexible body ● Modular ● Robustness ● Versatile ● Low cost 4 Toward the sense of touch in Snake modular robots for search and rescue operations
1.- Introduction Urban Search and Rescue Operations (III) ● Capabilities needed (at least): Locomotion, climbing and grasping 5 Toward the sense of touch in Snake modular robots for search and rescue operations
2.- Sense of touch Touch rings ● Discrete touch rings vs continuous artificial skin ● Easier to adapt to the different snake prototypes ● Distance d can be changed according to the requirements 6 Toward the sense of touch in Snake modular robots for search and rescue operations
2.- Sense of touch Touch strips ● Flexible capacitive strip ● Consist of three layers ● Electrodes in a flexible PCB layer ● The strip is bended to form a touch ring ● It fits snake robots with different cross section (circular, squared...) 7 Toward the sense of touch in Snake modular robots for search and rescue operations
3.- Mechanics Modules ● Y1 modules family ● Cube-M family ● Joined together by screws 8 Toward the sense of touch in Snake modular robots for search and rescue operations
3.- Mechanics Modular snakes prototypes 9 Toward the sense of touch in Snake modular robots for search and rescue operations
4.- Experiments Touch strip experiments (I) ● Only the first touch strip layer ● Very early experiments ● Only three electrodes ● Pith-pitch minimum modular robot 10 Toward the sense of touch in Snake modular robots for search and rescue operations
4.- Experiments Touch strip experiments (II) ● First tests carried out with Freescale standard electrodes ● Substituted by our touch strip ● Freescale software is used to display the measures 11 Toward the sense of touch in Snake modular robots for search and rescue operations
4.- Experiments Modular grasping simulation ● Grasping of a cylinder using the OpenRave Modular robot Plug-in (developed by ourselves) 12 Toward the sense of touch in Snake modular robots for search and rescue operations
6.- Conclusions Conclusions ● Modular Snake robots are good candidates for being used in USAR Operations ● At least, locomotion, climbing and grasping capabilities are needed ● The sense of touch is key to achieving these capabilities ● Our idea is to use touch rings and touch strips ● The early experiments are promising.... ...But still a lot of research have to be done 13 Toward the sense of touch in Snake modular robots for search and rescue operations
Towards the Sense of Touch in Snake Modular Robots for Search and Rescue Operations Juan González-Gómez, Javier Gonzalez-Quijano, Houxiang Zhang, Mohamed Abderrahim Robotics Lab TAMS group Universidad Carlos III de Madrid University of Hamburg Madrid (Spain) Hamburg (Germany) Dr. Juan González-Gómez. Workshop on Modular Robots. ICRA. May-3th-2010
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.