Toward a new era of EU-Japan 30 Germany cooperation in Robotics: - PowerPoint PPT Presentation
Research and Innovation in Robotics: New Opportunities for EU-Japan Cooperation The coming super-aged societies Comparison of aging population (over 65-year old) Japan Sweden (%) (%) Toward a new era of EU-Japan 30 Germany cooperation
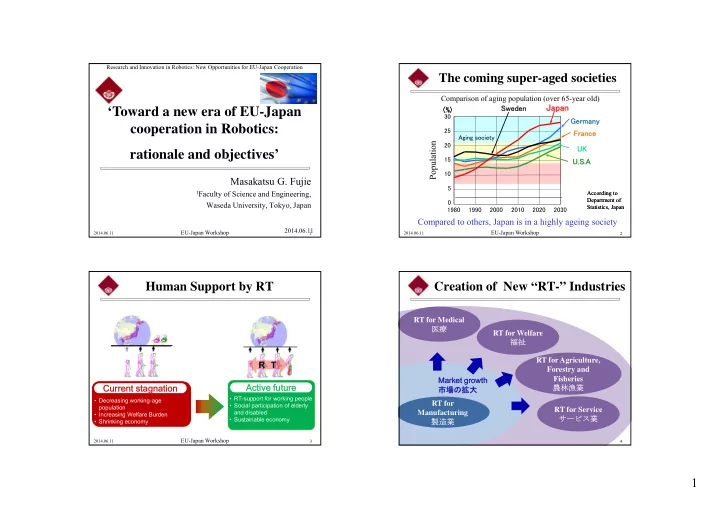
Research and Innovation in Robotics: New Opportunities for EU-Japan Cooperation The coming super-aged societies Comparison of aging population (over 65-year old) Japan Sweden (%) (%) ‘Toward a new era of EU-Japan 30 Germany cooperation in Robotics: 25 France Aging society Population 20 UK rationale and objectives’ 15 U.S.A 10 Masakatsu G. Fujie 5 1 Faculty of Science and Engineering, According to According to Department of Department of 0 Waseda University, Tokyo, Japan Statistics, Japan Statistics, Japan 1980 1990 2000 2010 2020 2030 Compared to others, Japan is in a highly ageing society 2014.06.11 EU-Japan Workshop EU-Japan Workshop 2014.06.11 1 2014.06.11 2 Human Support by RT Creation of New “RT-” Industries RT for Medical 医療 RT for Welfare 福祉 RT for Agriculture, Forestry and Market growth Fisheries Active future Current stagnation 農林漁業 市場の拡大 • RT-support for working people • Decreasing working-age RT for • Social participation of elderly population RT for Service and disabled • Increasing Welfare Burden Manufacturing • Sustainable economy サービス業 • Shrinking economy 製造業 EU-Japan Workshop EU-Japan Workshop 2014.06.11 2014.06.11 3 4 1
Main Purpose of this Program Market for New “RT-” Industries Title: 兆円 Human-Robot-Collaboration Challenge (HRC2) (x10 12 JPY) -- Robot Technologies for Daily Life Support and Manufacturing Assistance – New Robot Contents: Market In the super-aging society, human-adapted robots are urgently required both in daily life support and in manufacturing assistance. Conventional Manufacturing × HRP Robotics, DARPA Robotics Challenge Trials ( DRC ) , The Robot Market Great East Japan Earthquake Disaster Robotics, Decommission, Data: 技術戦略マップ2010. 経済産業省, 2010 Daily Life Support ( 0.1M¥ ) are out of scope EU-Japan Workshop EU-Japan Workshop 2014.06.11 5 2014.06.11 6 The Great East Japan Earthquake Practical application of medical and welfare robotics(2000s ~ ) Disaster Robotics Such advanced requirements could be realized by developing intelligent system that supports complicated machine operations Adaptive hydraulic control system T ‐ 53 (Tmsak) Bilateral human ‐ machine interface Operational gain control system Advanced hardware system Intuitive surgical Inc. KikuchiI Ltd. Double ‐ Front Construction Machinery Hocoma AG Tsukuba Univ. Honda Panasonic Dual arm demolition machine, (Hitachi const.) (Tokyu const.) EU-Japan Workshop EU-Japan Workshop 2014.06.11 2014.06.11 7 8 2
Key Concept of WASEDA Robot DARPA Robotics Challenge (Trial Tasks) Autonomy – Decision- Dismounted Mobility Mounted Mobility Autonomy – Perception Endurance Dexterity Strength making [http://www.theroboticschallenge.org/] 1. Drive utility vehicle (e.g. Gator, Ranger) X X X X 2. Travel dismounted 20 m through various X X X terrains Sample Tasks 3. Remove debris blocking entryway X X X X X 4. Open door, enter building X X X X 5. Climb industrial ladder/stairs/walkway X X X Robot with Human 6. Break through wall X X X X X 7. Locate and close valve X X X X X X 8. Connect fire hose X X X X X EU-Japan Workshop EU-Japan Workshop 2014.06.11 9 2014.06.11 10 DARPA Robotics Challenge (Program Tracks) DARPA Robotics Challenge (Program Tracks) CY2012 CY2013 CY2012 CY2013 CY2014/15 Phase 1 Phase 1 Phase 2 Track A 7 Teams 6 Teams Track A 7 Teams 6 Teams System $1.8M each CDR $1.2M each System $1.8M each CDR $1.2M each ≤ 8 Teams 11 Teams Track B 11 Teams Track B ≤ $1M each Software ≤ $375k each Software ≤ $375k each 7 Teams 7 Teams Winner ≤ $750k each ≤ $750k each 115 Teams Track C 115 Teams Track C VRC VRC $2M Software No funding Software No funding 1480 Prize m Teams Track D m Teams Track D System No funding System No funding 8 Months 6 Months 8 Months 6 Months 12-18 Months [Weight: 95 kg] October 2012 June 2013 December 2013 SCHAFT Inc. October 2012 June 2013 December 2013 December 2014 – June 2015 DRC Kickoff DRC Trials DRC Kickoff DRC Trials DRC Finals EU-Japan Workshop EU-Japan Workshop 2014.06.11 2014.06.11 11 12 3
Main Purpose of this Program To be developed in the future Human-Robot-Collaboration Diversity of Human ( age ・ gender ・ Skilled / unskilled and soon) “Fitting” autonomously in a changing environment like Human-Human-Collaboration People adapt to the machine Currently Currently >Achieve the Methodology Without collision Safe while touched Paradigm shift in the relationship between Intuitive machine - Human Willing to use Commercialize, New Products Future Future Machine is adjusted to people Comfortably drive >Achieve the Robots EU-Japan Workshop EU-Japan Workshop 2014.06.11 13 2014.06.11 14 Recent Example by MEXT Main Purpose of this Program Grant-in-Aid for Scientific Research(S) Foundation and Formation (Ongoing) -Research on Human and Robot cooperation models >EU: Horizon 2020? >Physical and emotional interaction Japan: >Safety of human when working with robots Interaction Model METI , MEXT, MHLW or Cabinet Office Coexistence of Human & Robot Human’s Robot’s METI: Ministry of Economy, Trade and Industry (Mr. YAJIMA)? behavior behavior MEXT: Ministry of Education, Culture, Sports, Science and Technology model model MHLW: Ministry of Health, Labour and Welfare (Elderly Dominate Society Cabinet Office of Japanese goverment Prof. Takanishi Prof. Fujie Prof. Sugano Similar formation like EUREKA ( 1985 ~) and Intelligent Humanoid Medical & Mechanical METI( Companies : Hitachi, Toshiba, NEC, Mitsubishi electric co.) - Robotics Welfare Engineering MEXT( Universities ), NASDA EU-Japan Workshop EU-Japan Workshop 2014.06.11 2014.06.11 15 16 4
Practical realization after EUREKA Research for Development Advanced and Innovative Companies, not the traditional companies. >Achieve the Methodology 1997,2000 : On space shuttle Discovery Commercialize, New Products with astronaut WAKATA >Achieve the Robots 2010 : ISS Japanese science module KIBO EU-Japan Workshop EU-Japan Workshop 2014.06.11 17 2014.06.11 18 Contents of this Program Aim to realize robots Keywords: >Challenging Tasks: Daily life support and Manufacturing Industry Thanks for your attention! assistance >Understanding method of Human condition Contact: mgfujie@waseda.jp >Learning of Communication situations and Realizing Mutual understanding >Dependable Robot Design (Reliable and Safety Robot Hardware) >and Contact Control Strategy between Human and Robots >Human-centered Manufacturing >Automation Cell with Robots >Evaluation metodology for Human-Robot-Collaboration EU-Japan Workshop EU-Japan Workshop 2014.06.11 2014.06.11 19 20 5
Framework of GRA EU-Japan Workshop EU-Japan Workshop 2014.06.11 21 2014.06.11 22 WASEDA の RT への 取り組み Cooperation between medical and 最近 10 年 + α の Pr. 年表は? engineering societies ’64 ’67 ’71 ’78 ’88 ’94 ’00 ’01 SI Medical societies 加藤研ゼミ 日立入社 早稲田 奉職 IROS(1) Engineering societirs RoManSy HRI system committee of integration between 東京オリン 加藤教授 高橋利衛 土屋喜一 JAES medical and engineering field Humanoid A. Rovetta (Politecnico Milano) P. Dario (SSSA) (69) IEEJ 高木純一 加藤一郎 P. Rabischong (INSERM Montpellier) Robot (Japan society for endoscopic society) (The institute of electrical engineers of Japan) B.. Roth (Stanford Univ.) 谷口 修:油圧制御 Institute 有本 卓:制御理論 A.. Morecki (Technical Univ. of Warsaw) JSAO JSPE (宮崎文夫 谷内田正彦) R. B. McGhee (Ohio State Univ.) ピッ 伊沢計介:制御理論 M. W. Thring (Univ. of London) (Japan society for artificial organs) (The Japan society for precise engineering) Cooperation 古田勝久 M. Vukobratovic (Mihailo Pupin) Agreement ク① RSJ J. Vertut (CEA) JSMBE 三輪敬之 HJ. Warnecke (Univ. of Stuttgart) 正木一郎 MIT (The robotics society of Japan) 広瀬茂男 (Japan society for medical and biological engineering ) 浜田利満 筑波学院大 LSE ’01 ’02 ’03 ’04 ’06 ’07 ’08 ’10 ’11 ’13 ’14 ’16 ‘17 ’19 ’20 JAMS (The society of life support engineering) 最終講義 (The Japan association of medical sciences) RoManSy IROS(26) JSME 土屋教授 谷江教授 東京オリン 高西教授 菅野教授 JCA (76) (60) (The Japan society of mechanical engineering) Combination (Japanese cancer association) GCOE 博士リーディング 21COE 卓越 JNS SICE プログラム Global Robot 超高齢社会における 拠点 (The Japan Neurosurgical Society) (The society of instrument and control engineers) Academia 実態情報学 ピッ 人とロボット技術の共生 JAAM ク② RASJA WABOT HOUSE 重点領域研究 (Japanese association for acute medicine) JSCAS (Rehabilitation engineering society of Japan) Active Aging JTTA 知的クラスター (試) Japan society of computer aided surgery (Japanese telemedicine and etc. ・・・ telecare association) EU-Japan Workshop EU-Japan Workshop 2014.06.11 2014.06.11 etc. ・・・ 23 24 6
Recommend










More recommend
Explore More Topics
Stay informed with curated content and fresh updates.