Time triggered real time communication Presentation overview - PDF document
11/24/2009 Roger Johansson Time triggered real time communication Presentation overview Background automotive electronics, an application area for time triggered communication. Time triggered protocols TTPC, first commercial implementation.
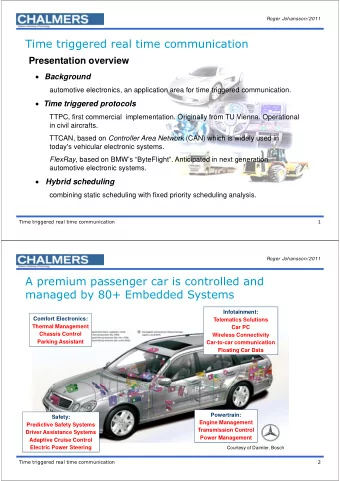
11/24/2009 Roger Johansson Time triggered real time communication Presentation overview Background automotive electronics, an application area for time triggered communication. Time triggered protocols TTPC, first commercial implementation. Originally from TU Vienna. Operational in civil aircrafts. TTCAN, based on Controller Area Network (CAN) which is widely used in today's vehicular electronic systems. FlexRay , based on BMW’s “ByteFlight”. Anticipated in next generation automotive electronic systems. Hybrid scheduling combining static scheduling with fixed priority scheduling analysis. Time triggered real time communication 1 Roger Johansson A premium passenger car is controlled and managed by 80+ Embedded Systems Infotainment: Comfort Electronics: Telematics Solutions Thermal Management Car PC Chassis Control Wireless Connectivity Parking Assistant Car-to-car communication Floating Car Data Powertrain: Safety: Engine Management Predictive Safety Systems Transmission Control Driver Assistance Systems Power Management Adaptive Cruise Control Electric Power Steering Courtesy of DaimlerChrysler, Bosch Time triggered real time communication 2 1
11/24/2009 Roger Johansson Virtual differentiation between variants Entertainment configuration Variant 1 A All variants of a specific model are physically identical and differ only in Motor configuration their individual software A configuration Entertainment The various included configuration physical components can be F activated or deactivated by Motor the software configuration B Variant 2 Time triggered real time communication 3 Roger Johansson Electrical system 1927-1997 54 54 1200 1200 No. of No. of meters of meters of No. of fuses electric electric wires wires 27 27 575 575 Wiring diagram, ÖV4 (“Jacob”) 1927 16 16 283 283 9 9 7 7 183 183 5 5 83 4 4 83 50 50 30 30 1927 1944 1956 1966 1975 1982 1997 1927 1944 1956 1966 1975 1982 1997 Time triggered real time communication 4 2
11/24/2009 Roger Johansson The evolution of the electrical system Power production & distribution Architecture Simple components Optimisation on many levels More complex functions Standardised interfaces stand-alone systems ABS, Airbag Integration of systems Optimisation of information Common data busses 1970 1980 1990 2000 2010 Time triggered real time communication 5 Roger Johansson Features 450 400 350 300 # of 250 functions 200 150 # of 100 integrated functions 50 0 1930 1940 1950 1960 1970 1980 1990 1995 2000 2005 Time triggered real time communication 6 3
11/24/2009 Roger Johansson Automotive electronics roadmap Time triggered real time communication 7 Roger Johansson The current electrical system Mirror Lock Lock Window Lift Universal Light CAN Light Seat Htng Instruments Htng Wiper Power Train Central WHtg Interior ITS Body Ctrl Roof Light Trunk Htng Climate x6 Seat Light Seat Htng CAN St-Wheel Panel Universal Motor Lock Lock Sub-Bus Universal Panel Mirror Time triggered real time communication 8 4
11/24/2009 Roger Johansson Multiplex Networks Conventional Network Data Identifier Control system Command Engine Control Module Driver Information Control units Automatic Transmission Central Module Time triggered real time communication 9 Roger Johansson Drive-by-wire Time triggered real time communication 10 5
11/24/2009 Roger Johansson Control system implementation strategies Local control Local information processing Independent control objects Centralized global control Local and central information processing Interconnected control objects Distributed global control Local and distributed information processing Interconnected control objects Time triggered real time communication 11 Roger Johansson Non-functional requirements System life Maintainability time Extendability Interoperability Changeability Portability Safety Testability Restructuring Performance/ Usability Efficiency System Security Availability Architecture Robustness Cost-effectiveness Reliability Fault tolerance Produceability Understandability Timeliness Variability (variants, configurations) Conceptual integrity Time triggered real time communication 12 6
11/24/2009 Roger Johansson Tradeoffs from Safety/Reliability requirements The extremes from reliability requirements leads to safety requirements. Safety requirements implies redundancy, (Fail-Operational, Fail-Safe, etc). Safety requirements also demands predictability, we has to show, a priori, that the system will fulfill it’s mission in every surrounding at every time. In a distributed environment, only time triggered protocols and redundant buses can provide this safety. Contemporary TTP’s are: TTP/C, first commercial implementation. Originally from TU Vienna. Operational in civil aircrafts. TTCAN, based on Controller Area Network (CAN) which is widely used in today's vehicular electronic systems. FlexRay , based on BMW’s “ByteFlight”. Anticipated in next generation automotive electronic systems. Time triggered real time communication 13 Roger Johansson TTCAN – Based on the CAN protocol – Bus topology – Media: twisted pair – 1Mbit/s Nod A Node 3 CPU/mem /CC Node 1 Node 6 Node 7 S S S Node 5 Node 4 Node 2 A second controller is required to implement the redundant bus Time triggered real time communication 14 7
11/24/2009 Roger Johansson TTCAN ”Exclusive” – guaranteed service ”Arbitration” – guaranteed service (high ID), best effort (low ID) ”Reserved” – for future expansion... Transmission Columns Basic cycle 0 Basic cycle 1 Basic cycle 2 Basic cycle 3 t Time is global and measured in network time units (NTU’s) Time triggered real time communication 15 Roger Johansson TTP/C – Double channels (one redundant). Bus topology or ”star” (optical) – Media: twisted pair, fibre – 10 Mbit/s for each channel CNI works as a “firewall” Nod Nod 3 Status , global time, membership Nod 1 6 Control , clock interrupt Watchdog , checking consensus Data the actual message Nod Nod Nod 5 4 2 Nod A Nod Nod CPU/mem CNI 1 4 /CC A Nod Nod S S 2 5 S Nod B Nod 3 6 A network is built on either twin buses or twin stars. Time triggered real time communication 16 8
11/24/2009 Roger Johansson TTP/C All communication is statically scheduled Guaranteed service ”TDMA - round” ”message slots” t Non periodical messages has to been fitted into static slots by the application Time triggered real time communication 17 Roger Johansson Flexray – Double channels, bus or star (even mixed). – Media: twisted pair, fibre – 10 Mbit/s for each channel Nod 3 Nod 1 Nod Nod 6 Nod 7 A CPU/mem/ B CC S S A S Nod 5 Nod 4 Nod 2 Redundant channel can be used for an alternative schedule Time triggered real time communication 18 9
11/24/2009 Roger Johansson Flexray ”Static segment” (compare TTCAN ”Exclusive”) – guaranteed service ”Dynamic segment” (compare TTCAN ”Arbitration”) – guaranteed service (high ID), ”best effort” (low ID) 63 62 Network Idle Time Symbol window ”Best - effort” Guaranteed periodical Guaranteed periodical/ aperiodical aperiodical 3 2 1 0 Static segment Dynamic segment (m slots) (n mini-slots) Max 64 nodes on a Flexray network. Time triggered real time communication 19 Roger Johansson Comparisons All protocols targets real time applications. TTCAN and Flexay combines time AND event triggered paradigms well. All protocols are suitable for scheduling tools. TTP/C has commercial production tools. Tools for TTCAN and Flexray are anticipated. CAN, many years experiences, a lot of existing applications. Implies migration of existing CAN applications into TTCAN. TTP/C considered as complex. Poor support for asynchronous events. High complexity, lacks second (or multiple) sources. Flexray is the latest initiative. Supported by most automotive suppliers. Time triggered real time communication 20 10
11/24/2009 Roger Johansson Combining time triggering with events: Example of Hybrid scheduling for TTCAN Messages are sorted into three different categories: Hard real-time, for minimal jitter with guaranteed response time. Firm real-time, for guaranteed response time, but can tolerate jitter. Soft real-time , for “best effort” messages. Time triggered real time communication 21 Roger Johansson Transmission Columns Time triggered time windows Basic cycle 0 messages M h Basic cycle 1 Basic cycle 2 Basic cycl e 3 After structuring: M : { M h , M f , M s }, assume that at least M h is defined. We now construct a matrix cycle. Due to protocol constraints, the schedule has to fulfil: LCM ( M h p ) = x 2 n where: LCM is least common multiple period for the M h message set; x is the preferred length of a basic cycle within LCM; n is the number of basic cycles . Hardware constraints: Hwc1: 1 ≤ x ≤ 2 y , has to be consistent with a hardware register, y bits Hwc2: 0 ≤ n ≤ k, always a power of 2, constraint in hardware. Hwc3: # of triggers ≤ Tr, columns in the matrix cycle. Limited by the number of available trigger registers. Time triggered real time communication 22 11
Recommend














More recommend
Explore More Topics
Stay informed with curated content and fresh updates.