The Maximum Binary Tree Problem Young-San Lin Purdue University - PowerPoint PPT Presentation
The Maximum Binary Tree Problem Young-San Lin Purdue University August 25, 2020 joint work with Karthekeyan Chandrasekaran, Elena Grigorescu, Gabriel Istrate, Shubhang Kulkarni and Minshen Zhu Overview Introduction Inapproximability Results
The Maximum Binary Tree Problem Young-San Lin Purdue University August 25, 2020 joint work with Karthekeyan Chandrasekaran, Elena Grigorescu, Gabriel Istrate, Shubhang Kulkarni and Minshen Zhu
Overview Introduction Inapproximability Results Hardness of DAGMBT k - BinaryTree via Multilinear Detection
Overview Introduction Inapproximability Results Hardness of DAGMBT k - BinaryTree via Multilinear Detection
Introduction ◮ Degree-constrained subgraph problems: Find an optimal subgraph with specific properties satisfying degree constraints ◮ Minimum-cost Degree-Bounded Spanning Tree ◮ Minimum Subgraph of Minimum Degree d
Introduction ◮ Degree-constrained subgraph problems: Find an optimal subgraph with specific properties satisfying degree constraints ◮ Minimum-cost Degree-Bounded Spanning Tree ◮ Minimum Subgraph of Minimum Degree d ◮ Flip the objective and constraint ◮ The Minimum Degree Spanning Tree problem
Introduction ◮ Degree-constrained subgraph problems: Find an optimal subgraph with specific properties satisfying degree constraints ◮ Minimum-cost Degree-Bounded Spanning Tree ◮ Minimum Subgraph of Minimum Degree d ◮ Flip the objective and constraint ◮ The Minimum Degree Spanning Tree problem ◮ Have led to interesting techniques in approximation algorithms
Introduction ◮ Degree-constrained subgraph problems: Find an optimal subgraph with specific properties satisfying degree constraints ◮ Minimum-cost Degree-Bounded Spanning Tree ◮ Minimum Subgraph of Minimum Degree d ◮ Flip the objective and constraint ◮ The Minimum Degree Spanning Tree problem ◮ Have led to interesting techniques in approximation algorithms ◮ We are interested in finding maximum binary trees (MBT)
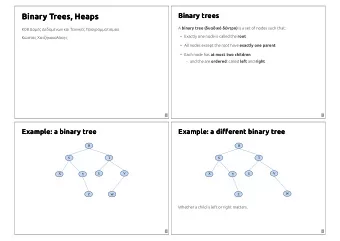
Definitions Definition (Binary Tree in Undirected Graph G ) A binary tree T = ( V T , E T ) of G is a connected, acyclic subgraph of G where deg T ( v ) ≤ 3 for each v ∈ V T .
Definitions Definition (Binary Tree in Undirected Graph G ) A binary tree T = ( V T , E T ) of G is a connected, acyclic subgraph of G where deg T ( v ) ≤ 3 for each v ∈ V T . Definition (Binary Tree in Directed Graph G ) A binary tree T = ( V T , E T ) of G is a connected, acyclic subgraph of G where deg out T ( v ) ≤ 1 and deg in T ( v ) ≤ 2 for each v ∈ V T .
Definitions Definition (Binary Tree in Undirected Graph G ) A binary tree T = ( V T , E T ) of G is a connected, acyclic subgraph of G where deg T ( v ) ≤ 3 for each v ∈ V T . Definition (Binary Tree in Directed Graph G ) A binary tree T = ( V T , E T ) of G is a connected, acyclic subgraph of G where deg out T ( v ) ≤ 1 and deg in T ( v ) ≤ 2 for each v ∈ V T . Definition (Rooted Binary Tree) A binary tree in an undirected (resp. directed) graph G = ( V , E ) is said to be rooted at r ∈ V if deg T ( r ) ≤ 2 (resp. deg out T ( r ) = 0).
A Directed Binary Tree r
A Directed Binary Tree r
A Directed Binary Tree r
Problems of Interest Definition ( UndirMBT , ) ◮ Input: Undirected graph G = ( V , E ) ◮ Output: Binary Tree T = ( V T , E T ) of G ◮ Goal: Maximize | V T |
Problems of Interest Definition ( UndirMBT , r-UndirMBT ) ◮ Input: Undirected graph G = ( V , E ) and root r ∈ V ◮ Output: Binary Tree T = ( V T , E T ) of G rooted at r ◮ Goal: Maximize | V T |
Problems of Interest Definition ( UndirMBT , r-UndirMBT ) ◮ Input: Undirected graph G = ( V , E ) and root r ∈ V ◮ Output: Binary Tree T = ( V T , E T ) of G rooted at r ◮ Goal: Maximize | V T | Definition ( DirMBT / DAGMBT , ) ◮ Input: Directed graph/DAG G = ( V , E ) ◮ Output: Binary Tree T = ( V T , E T ) of G ◮ Goal: Maximize | V T |
Problems of Interest Definition ( UndirMBT , r-UndirMBT ) ◮ Input: Undirected graph G = ( V , E ) and root r ∈ V ◮ Output: Binary Tree T = ( V T , E T ) of G rooted at r ◮ Goal: Maximize | V T | Definition ( DirMBT / DAGMBT , r-DirMBT / r-DAGMBT ) ◮ Input: Directed graph/DAG G = ( V , E ) and root r ∈ V ◮ Output: Binary Tree T = ( V T , E T ) of G rooted at r ◮ Goal: Maximize | V T |
Problems of Interest Definition ( UndirMBT , r-UndirMBT ) ◮ Input: Undirected graph G = ( V , E ) and root r ∈ V ◮ Output: Binary Tree T = ( V T , E T ) of G rooted at r ◮ Goal: Maximize | V T | Definition ( DirMBT / DAGMBT , r-DirMBT / r-DAGMBT ) ◮ Input: Directed graph/DAG G = ( V , E ) and root r ∈ V ◮ Output: Binary Tree T = ( V T , E T ) of G rooted at r ◮ Goal: Maximize | V T | Remark DAGMBT ≡ p r-DAGMBT . Unclear for general directed and undirected graphs.
Motivation I — Connections to Longest Path ◮ MBT can be viewed as a variant of the Longest Path problem
Motivation I — Connections to Longest Path ◮ MBT can be viewed as a variant of the Longest Path problem ◮ Longest Path reformulation: Find a maximum-sized tree in which every vertex has degree at most 2 for undirected graphs;
Motivation I — Connections to Longest Path ◮ MBT can be viewed as a variant of the Longest Path problem ◮ Longest Path reformulation: Find a maximum-sized tree in which every vertex has degree at most 2 for undirected graphs; in which every vertex has in and out degree at most 1 and out-degree of root is 0 for directed graphs
Motivation I — Connections to Longest Path ◮ MBT can be viewed as a variant of the Longest Path problem ◮ Longest Path reformulation: Find a maximum-sized tree in which every vertex has degree at most 2 for undirected graphs; in which every vertex has in and out degree at most 1 and out-degree of root is 0 for directed graphs ◮ MBT vs Longest Path illustration by picture:
Motivation II — Connections to Sequence Heapability Definition (Sequence Heapability) A sequence σ = σ 1 · · · σ n is said to be heapable if σ 1 · · · σ n can be inserted into a binary min-heap sequentially and in order. ◮ Introduced by Byers, Heeringa, Mitzenmacher, and Zervas (ANALCO ′ 11)
Motivation II — Connections to Sequence Heapability Definition (Sequence Heapability) A sequence σ = σ 1 · · · σ n is said to be heapable if σ 1 · · · σ n can be inserted into a binary min-heap sequentially and in order. ◮ Introduced by Byers, Heeringa, Mitzenmacher, and Zervas (ANALCO ′ 11) ◮ This problem can be viewed as a variant of the longest increasing subsequence.
Motivation II — Connections to Sequence Heapability Definition (Sequence Heapability) A sequence σ = σ 1 · · · σ n is said to be heapable if σ 1 · · · σ n can be inserted into a binary min-heap sequentially and in order. ◮ Introduced by Byers, Heeringa, Mitzenmacher, and Zervas (ANALCO ′ 11) ◮ This problem can be viewed as a variant of the longest increasing subsequence. ◮ Given σ , we can construct a DAG G σ , s.t.
Motivation II — Connections to Sequence Heapability Definition (Sequence Heapability) A sequence σ = σ 1 · · · σ n is said to be heapable if σ 1 · · · σ n can be inserted into a binary min-heap sequentially and in order. ◮ Introduced by Byers, Heeringa, Mitzenmacher, and Zervas (ANALCO ′ 11) ◮ This problem can be viewed as a variant of the longest increasing subsequence. ◮ Given σ , we can construct a DAG G σ , s.t. 1. Longest increasing subsequence of σ ⇐ ⇒ longest path of G σ .
Motivation II — Connections to Sequence Heapability Definition (Sequence Heapability) A sequence σ = σ 1 · · · σ n is said to be heapable if σ 1 · · · σ n can be inserted into a binary min-heap sequentially and in order. ◮ Introduced by Byers, Heeringa, Mitzenmacher, and Zervas (ANALCO ′ 11) ◮ This problem can be viewed as a variant of the longest increasing subsequence. ◮ Given σ , we can construct a DAG G σ , s.t. 1. Longest increasing subsequence of σ ⇐ ⇒ longest path of G σ . 2. Longest heapable subsequence of σ ⇐ ⇒ MBT of G σ .
Our Hardness Results APX is α -approximation if APX ≥ α · OPT, where α ∈ (0 , 1). Family Assumption Max Binary Tree Longest Path P � = NP DAGs ETH P � = NP Directed ETH P � = NP Undirected ETH
Our Hardness Results APX is α -approximation if APX ≥ α · OPT, where α ∈ (0 , 1). Family Assumption Max Binary Tree Longest Path P � = NP Poly-time solvable DAGs ETH Poly-time solvable P � = NP Directed ETH P � = NP Undirected ETH
Our Hardness Results APX is α -approximation if APX ≥ α · OPT, where α ∈ (0 , 1). Family Assumption Max Binary Tree Longest Path P � = NP No poly-time Ω(1)-apx Poly-time solvable No poly-time log n DAGs ETH exp( − O ( log log n ))-apx Poly-time solvable No quasi-poly-time exp( − O (log 1 − ǫ n ))-apx P � = NP Directed ETH P � = NP Undirected ETH
Our Hardness Results APX is α -approximation if APX ≥ α · OPT, where α ∈ (0 , 1). Family Assumption Max Binary Tree Longest Path P � = NP No poly-time Ω(1)-apx Poly-time solvable No poly-time log n DAGs ETH exp( − O ( log log n ))-apx Poly-time solvable No quasi-poly-time exp( − O (log 1 − ǫ n ))-apx P � = NP No poly-time � 1 � Directed Ω -apx n 1 − ǫ ETH Same as P � = NP P � = NP Undirected ETH
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.