Table Based Models Victor Bourenkov Computational Modelling Group - PowerPoint PPT Presentation
Table Based Models Victor Bourenkov Computational Modelling Group Tyndall National Institute, Cork, Ireland Kevin G. McCarthy Department of Electrical and Electronic Engineering University College Cork, Ireland Outline Table look-up
Table Based Models Victor Bourenkov Computational Modelling Group Tyndall National Institute, Cork, Ireland Kevin G. McCarthy Department of Electrical and Electronic Engineering University College Cork, Ireland
Outline • Table look-up models – Interpolation methods – Generation of data tables • SPICE implementation and performance • Further developments and critique of the approach • Summary/conclusion Table Based Models MOS-AK Grenoble 16.09.2005 2
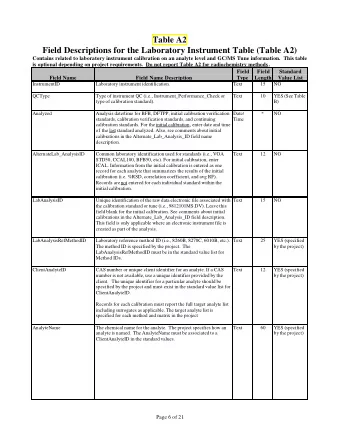
Table look-up models i 0 1 2 3 4 5 6 V j 0 0.1 0.5 1.0 1.5 2.5 3.5 V DS GS Model setup 5 × 10 -7 6 × 10 -7 7 × 10 -7 8 × 10 -7 1 × 10 -6 2 × 10 -6 0 0.3 0.0 6 × 10 -5 7 × 10 -5 8 × 10 -5 9 × 10 -5 1 × 10 -4 2 × 10 -4 1 0.5 0.0 2 0.7 0.0 0.0014 0.0020 0.0023 0.0025 0.0028 0.0032 Tables of electrical 3 0.9 0.0 0.004 0.0082 0.0089 0.0094 0.010 0.011 characteristics 4 1.2 0.0 0.007 0.020 0.022 0.023 0.025 0.027 5 1.8 0.0 0.011 0.042 0.055 0.058 0.062 0.065 6 2.5 0.0 0.014 0.059 0.09 0.10 0.11 0.11 Search function 7 3.5 0.0 0.017 0.073 0.12 0.15 0.17 0.18 Table of I DS , ids[i][j] Interpolation routines Given bias values search for V DS =1.7 V, V GS =1.5 V nearest table entries i=4, j=4 Interface to simulator Interpolate I DS (V DS ,V GS ) Table Based Models MOS-AK Grenoble 16.09.2005 3
Interpolation method requirements • Compatible with the Newton-Raphson algorithm – Continuous – Preserve monotonicity of data (non-oscillatory) – Preferably C 1 smooth (continuous derivatives) or better • Accurate • Fast • Optimal memory usage • Easy to understand Table Based Models MOS-AK Grenoble 16.09.2005 4
Interpolation and approximation methods • Polynomial interpolation – Linear – Quadratic – Exponential • Variation diminishing B-spline approximation • Combined interpolations • Other interpolations – Spline interpolations – Variation diminishing interpolations (ENO) Table Based Models MOS-AK Grenoble 16.09.2005 5
Linear interpolation • Advantages – Computationally simple – Preserves monotonicity of data – Accuracy is easily controlled by table density • Disadvantages – Discontinuous first derivatives – Relatively large tables are needed for good accuracy − V V = + − i I ( V ) I ( I I 1 ) + − DS i i i V V + i 1 i Table Based Models MOS-AK Grenoble 16.09.2005 6
Quadratic interpolation • Advantages – More accurate than linear interpolation – Accuracy is easily controlled by table density – Control of derivative continuity • Disadvantages − − ( V V )( V V ) = + + i 1 i 2 L ( V ) – Not guaranteed to be − − 0 , i ( V V )( V V ) + + i 2 i i 1 i monotonic − − ( V V )( V V ) = + i i 2 L ( V ) − − 1 , i ( V V )( V V ) – Slower than linear interpolation + + + i 1 i 2 i 1 i − − ( V V )( V V ) = + i 1 i L ( V ) − − 2 , i ( V V )( V V ) + + + i 2 i i 2 i 1 = + + I ( V ) I L ( V ) I L ( V ) I L ( V ) + + DS i 0 , i i 1 1 , i i 2 2 , i Table Based Models MOS-AK Grenoble 16.09.2005 7
Exponential interpolation • Advantages – Preserves monotonicity of data – Very good fit to experimental data • Disadvantages – Computationally expensive – Discontinuous first derivatives − V V I + i i 1 ln( ) + − = V V I I ( V ) I e i 1 i i DS i Table Based Models MOS-AK Grenoble 16.09.2005 8
B-spline approximation • Advantages – Continuous first derivative – Preserves monotonicity of data – Accuracy is easily controlled by table density • Disadvantages – Slower than linear or quadratic interpolations – Approximation is not as accurate as interpolation = + + I ( V ) I B ( V ) I B ( V ) I B ( V ) + + + + DS i i , t i 1 i 1 , t i 2 i 2 , t Table Based Models MOS-AK Grenoble 16.09.2005 9
Combined interpolation • 1. Subthreshold region: exponential interpolation f EXP V ( ) 3 GS • 3. Strong inversion: linear 2 (quadratic) interpolation f LIN V ( ) GS • 2. Transition region: blending function [#] 1 − V V ( V , V ) µ = GS TH BS DS ( V ) ∆ GS = − µ + µ I ( V ) ( 1 ( V )) f ( V ) ( V ) f ( V ) DS GS GS EXP GS GS LIN GS [#] V.Bourenkov, K. G. McCarthy, A. Mathewson. ICMTS 2003 Table Based Models MOS-AK Grenoble 16.09.2005 10
Other interpolations • Cubic spline interpolation – Smooth first derivatives – May oscillate, computationally expensive • Bicubic interpolation (in 2D) – Monotonic, continuous first derivatives – Complex implementation for 3D • Essentially Non-Oscillatory approximation # – Monotonic, continuous first derivatives – Complex implementation [#] B. Yang, B. McGaughy. DAC 2004 Table Based Models MOS-AK Grenoble 16.09.2005 11
3D Interpolation • MOSFET is a four-terminal device • Device characteristics are functions of three relative voltages • Three-dimensional tables to store measured data • Three-dimensional interpolation Table Based Models MOS-AK Grenoble 16.09.2005 12
Extrapolation • “Phantom vertices” method – Linear extrapolation in strong inversion – Exponential extrapolation in weak inversion Table Based Models MOS-AK Grenoble 16.09.2005 13
Generation of data tables (I) • Measurements • Device simulations • Analytical compact models Measure DC currents for different bias conditions D G B I D I B + + - V V V V G S B D S - - + Table Based Models MOS-AK Grenoble 16.09.2005 14
Generation of data tables (II) Extraction of terminal charges From analytical model From transient analysis (QS) # From DC and s-parameter 1 dQ dQ dv = + = = i cond ( v ) [ i ( t ( v )) i ( t ( v ))] i cap ( v ) 1 2 measurements (NQS) @ 2 dt dv dt 1 ∫ v = + 0 = − Q ( v ) Q i ( u ) du i cap ( v ) [ i ( t ( v )) i ( t ( v ))] 0 cap 1 2 v 2 [#] G. Schrom, A. Stach, S. Selberherr. Microelectronics Jornal, 1998. [@] M. F. Barciela et al . IEEE Tran. On Microwave Theory and Technics, 2000. Table Based Models MOS-AK Grenoble 16.09.2005 15
Channel geometry scaling • Inter-table interpolation • Linear interpolation in W dimension • Quadratic interpolation in L dimension Table Based Models MOS-AK Grenoble 16.09.2005 16
Outline • Table look-up models – Interpolation methods – Generation of data tables • SPICE implementation and performance • Further developments and critique of the approach • Summary/conclusion Table Based Models MOS-AK Grenoble 16.09.2005 17
SPICE implementation Setup Initial operating point Main device model routines Load DEV.c Solve linear DEVpar.c matrix equations DEVmpar.c DEVsetup.c Convergence ? DEVload.c Yes DEVacload.c Increment time DEVcvtest.c DEVask.c End of time interval ? DEVmask.c Yes Output [#] V.Bourenkov, K. G. McCarthy, A. Mathewson. Electrosoft V (2001) Table Based Models MOS-AK Grenoble 16.09.2005 18
Performance Model run time per transistor 90 80 70 Table model: linear 1 60 Time ( µ s) Table model: linear 2 50 Table model: quadratic 40 Table model: B-spline 30 BSIM 3v3.2.2 20 10 0 Total simulation time 18 16 14 Simulation time (s) Table model: linear 1 12 Table model: linear 2 10 Table model: quadratic 8 Table model: B-spline 6 BSIM 3v3.2.2 4 2 0 Table Based Models MOS-AK Grenoble 16.09.2005 19
Performance • Accuracy and table size • Memory requirements 1600 1400 Memory Usage, kbytes 1200 Table Model, 1000 14x26x8 Table Model, 800 11x16x8 BSIM3v3.2.2 600 400 200 0 1 8 (4) 17 (7) Number of MOSFETs (and unique geometries) Table Based Models MOS-AK Grenoble 16.09.2005 20
Circuit simulation results (I) • Data tables generated from BSIM3v3.2.2 • Analyses: – CMOS inverter, DC analysis – Ring oscillator, transient analysis – Op-amp, DC and frequency response Table Based Models MOS-AK Grenoble 16.09.2005 21
Circuit simulation results (II) Table Based Models MOS-AK Grenoble 16.09.2005 22
Interpolation of derivatives Table Based Models MOS-AK Grenoble 16.09.2005 23
Outline • Table look-up models – Interpolation methods – Generation of data tables • SPICE implementation and performance • Further developments and critique of the approach • Summary/conclusion Table Based Models MOS-AK Grenoble 16.09.2005 24
Further developments •“Context aware” interpolation • Subcircuit level table models • Hybrid table/analytical approach • Temperature scaling • Noise modelling Table Based Models MOS-AK Grenoble 16.09.2005 25
Subcircuit modelling •Sub-circuits can be represented by table models 3 I 3 (V IN ) I 1 (V IN ) I 2 (V IN ) 1 2 0 Table Based Models MOS-AK Grenoble 16.09.2005 26
Table Model: The good points • Models for new devices can be implemented quickly • Less time-consuming parameter extraction • Fewer errors in implementation • Controllable accuracy – Density of table data and interpolation method • Measurement-based model – no need to change model equations Table Based Models MOS-AK Grenoble 16.09.2005 27
Recommend





More recommend
Explore More Topics
Stay informed with curated content and fresh updates.