Structured Doubling Algorithms for Solving g-Palindromic Quadratic - PowerPoint PPT Presentation
Existing Approaches S + S 1 Transformation Doubling Factorization g-SDA Conclusions Structured Doubling Algorithms for Solving g-Palindromic Quadratic Eigenvalue Problems Eric King-wah Chu School of Mathematical Sciences Building 28,
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Scaling the first row-blocks by − A − 1 and the second 1 , then swap the roles of � L and � column-blocks by A −⊤ M , we 1 have a SSF form � I � � � G A 0 τ − A ⊤ 0 − H I with A ≡ − A − 1 1 , H ≡ − A 0 = H ⊤ , G ≡ A − 1 1 A 0 A −⊤ 1 A ⊤ = G ⊤ . 1 The SDA can then be applied. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Similarly, another doubling step produces τ = λ 4 ( τ Z + Z ⊤ ) y = 0 , with � � − A ⊤ 1 A − 1 − A ⊤ 1 A − 1 1 A ⊤ 1 A 0 1 Z = A ⊤ 1 − A 0 A − 1 − A 0 A − 1 1 A ⊤ 1 A 0 1 Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions S + S − 1 Transformation Lin/Qian 2007 The matrices � A 1 � � 0 � 0 I M = , L = A ⊤ − A 0 − I 0 1 define the ⊤ -symplectic pencil M − λ L , with � 0 � I MJ M ⊤ = LJ L ⊤ , J = − I 0 Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions S + S − 1 Transformation Lin/Qian 2007 The matrices � A 1 � � 0 � 0 I M = , L = A ⊤ − A 0 − I 0 1 define the ⊤ -symplectic pencil M − λ L , with � 0 � I MJ M ⊤ = LJ L ⊤ , J = − I 0 After the S + S − 1 transformation: L ≡ ( MJ L ⊤ + LJ M ⊤ ) − λ LJ L ⊤ M − λ � � Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions S + S − 1 Transformation, cont. ◮ A matrix H ∈ C 2 n × 2 n is T-skew-Hamiltonian, if ( HJ ) ⊤ = −HJ . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions S + S − 1 Transformation, cont. ◮ A matrix H ∈ C 2 n × 2 n is T-skew-Hamiltonian, if ( HJ ) ⊤ = −HJ . ◮ � A 1 − A ⊤ � � 0 � A 0 − A 1 M − λ � � 1 L = − λ A 1 − A ⊤ A ⊤ − A 0 0 1 1 �� � � − A 1 �� A ⊤ A 0 1 − A 1 0 = − λ J A 1 − A ⊤ − A ⊤ A 0 0 1 1 ≡ ( K − λ N ) J Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions S + S − 1 Transformation, cont. ◮ A matrix H ∈ C 2 n × 2 n is T-skew-Hamiltonian, if ( HJ ) ⊤ = −HJ . ◮ � A 1 − A ⊤ � � 0 � A 0 − A 1 M − λ � � 1 L = − λ A 1 − A ⊤ A ⊤ − A 0 0 1 1 �� � � − A 1 �� A ⊤ A 0 1 − A 1 0 = − λ J A 1 − A ⊤ − A ⊤ A 0 0 1 1 ≡ ( K − λ N ) J ◮ Both K and N are ⊤ -skew-Hamiltonian. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations ⊤ -skew-Hamiltonian pencil K and N : K N × × × × 0 × × × × × × × 0 0 0 0 × × × × × 0 × × × × × × 0 0 0 0 × × × × × × 0 × × × × × 0 0 0 0 × × × × × × × 0 × × × × 0 0 0 0 0 × × × × × × × 0 0 0 0 × × × × × 0 × × × × × × 0 0 0 0 × × × × × × 0 × × × × × 0 0 0 0 × × × × × × × 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations Annihilate the strictly lower triangular part of N (1 : 4 , 1 : 4): K ← Q K Z N ← Q N Z × × × × 0 × × × × × × × 0 0 0 0 × × × × × 0 × × 0 × × × 0 0 0 0 × × × × × × 0 × 0 0 × × 0 0 0 0 × × × × × × × 0 0 0 0 × 0 0 0 0 0 × × × × × × × 0 0 0 0 × 0 0 0 × 0 × × × × × × 0 0 0 0 × × 0 0 × × 0 × × × × × 0 0 0 0 × × × 0 × × × 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations Annihilate K (6 , 1): K ← Q K Z N ← Q N Z × × × × 0 × × × × × × × 0 0 0 0 × × × × × 0 × × 0 × × × 0 0 0 0 × × × × × × 0 × 0 ⊗ × × 0 0 0 0 × × × × × × × 0 0 0 0 × 0 0 0 0 0 0 × × × × × × 0 0 0 0 × 0 0 0 0 0 × × × × × × 0 0 0 0 × × ⊗ 0 × × 0 × × × × × 0 0 0 0 × × × 0 × × × 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations Annihilate K (7 , 1): K ← Q K Z N ← Q N Z × × × × 0 × × × × × × × 0 0 0 0 × × × × × 0 × × 0 × × × 0 0 0 0 × × × × × × 0 × 0 0 × × 0 0 0 0 × × × × × × × 0 0 0 ⊗ × 0 0 0 0 0 0 0 × × × × × 0 0 0 0 × 0 0 0 0 0 × × × × × × 0 0 0 0 × × 0 0 0 × 0 × × × × × 0 0 0 0 × × × ⊗ × × × 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations Annihilate K (8 , 1) using G s 1 transformation: K ← Q K Z N ← Q N Z × × × × 0 × × × × × × × 0 0 0 × × × × × × 0 × × 0 × × × 0 0 0 × × × × × × × 0 × 0 0 × × 0 0 0 × × × × × × × × 0 0 0 0 × × × × 0 0 0 0 0 × × × × 0 0 0 0 × 0 0 0 0 0 × × × × × × 0 0 0 0 × × 0 0 0 × 0 × × × × × 0 0 0 0 × × × 0 0 × × 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations Annihilate K (4 , 1): K ← Q K Z N ← Q N Z × × × × 0 × × × × × × × 0 × × × × × × × × 0 × × 0 × × × × 0 × × × × × × × × 0 × 0 0 × × × × 0 × 0 × × × × × × 0 0 0 ⊗ × × × × 0 0 0 0 0 × × 0 0 0 0 0 0 × 0 0 0 0 0 × × × × × × 0 0 0 0 × × 0 0 0 × 0 × × × × × 0 0 0 0 × × × ⊗ 0 × × 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations Annihilate K (3 , 1): K ← Q K Z N ← Q N Z × × × × 0 × × × × × × × 0 × × × × × × × × 0 × × 0 × × × × 0 × × 0 × × × × × 0 × 0 ⊗ × × × × 0 × 0 × × × × × × 0 0 0 0 × × × × 0 0 0 0 0 × × 0 0 0 0 0 0 × 0 0 0 0 0 × × × × × × 0 0 0 0 × × ⊗ 0 0 × 0 × × × × × 0 0 0 0 × × × 0 0 × × 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Generalized Givens and Householder Transformations Repeat . . . K ← Q K Z N ← Q N Z × × × × 0 × × × × × × × 0 × × × × × × × × 0 × × 0 × × × × 0 × × 0 × × × × × 0 × 0 0 × × × × 0 × 0 0 × × × × × 0 0 0 0 × × × × 0 0 0 0 0 × × 0 0 0 0 0 0 × 0 0 0 0 0 0 0 × × × 0 0 0 0 0 × × 0 0 0 0 0 0 × × × × 0 0 0 0 × × × 0 0 0 0 0 × × × × 0 0 0 0 × × × × Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Structure-Preserving Doubling Algorithm for DAREs Chu/Fan/Lin/Wang 2004 Discrete linear system: x j +1 = Ax j + Bu j Optimal control: � � � ∞ u j J = 1 x ⊤ j Hx j + u ⊤ min j Ru j 2 j =1 Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Structure-Preserving Doubling Algorithm for DAREs Chu/Fan/Lin/Wang 2004 Discrete linear system: x j +1 = Ax j + Bu j Optimal control: � � � ∞ u j J = 1 x ⊤ j Hx j + u ⊤ min j Ru j 2 j =1 ◮ Discrete Algebraic Riccati Equation (DARE): X = A ⊤ X ( I + GX ) − 1 A + H Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for DAREs, cont. ◮ Solution of DARE via the EVP: ( λ L − M ) z = 0, with � � � I � A 0 G M = , L = A ⊤ − H I 0 Matrix pair ( M , L ) is in Standard Symplectic Form (SSF). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for DAREs, cont. ◮ Solution of DARE via the EVP: ( λ L − M ) z = 0, with � � � I � A 0 G M = , L = A ⊤ − H I 0 Matrix pair ( M , L ) is in Standard Symplectic Form (SSF). ◮ ( M , L ) is symplectic: � 0 � I MJ M ⊤ = LJ L ⊤ , J = − I 0 Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for DAREs, cont. ◮ Solution of DARE via the EVP: ( λ L − M ) z = 0, with � � � I � A 0 G M = , L = A ⊤ − H I 0 Matrix pair ( M , L ) is in Standard Symplectic Form (SSF). ◮ ( M , L ) is symplectic: � 0 � I MJ M ⊤ = LJ L ⊤ , J = − I 0 ◮ Symplectic in SSF is stronger. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Stable Solution With MJ M ⊤ = LJ L ⊤ , consider y ⊤ M = λ y ⊤ L ⇒ y ⊤ MJ M ⊤ = λ y ⊤ LJ M ⊤ ⇔ ( y ⊤ LJ ) L ⊤ = λ ( y ⊤ LJ ) M ⊤ so λ ∈ σ ( M , L ) ⇔ λ − 1 ∈ σ ( M , L ), or σ ( M , L ) = σ ( L , M ). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Stable Solution With MJ M ⊤ = LJ L ⊤ , consider y ⊤ M = λ y ⊤ L ⇒ y ⊤ MJ M ⊤ = λ y ⊤ LJ M ⊤ ⇔ ( y ⊤ LJ ) L ⊤ = λ ( y ⊤ LJ ) M ⊤ so λ ∈ σ ( M , L ) ⇔ λ − 1 ∈ σ ( M , L ), or σ ( M , L ) = σ ( L , M ). ◮ Stable deflating subspace gives rise to the stable symmetric positive definite solution of the DARE. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Stable Solution With MJ M ⊤ = LJ L ⊤ , consider y ⊤ M = λ y ⊤ L ⇒ y ⊤ MJ M ⊤ = λ y ⊤ LJ M ⊤ ⇔ ( y ⊤ LJ ) L ⊤ = λ ( y ⊤ LJ ) M ⊤ so λ ∈ σ ( M , L ) ⇔ λ − 1 ∈ σ ( M , L ), or σ ( M , L ) = σ ( L , M ). ◮ Stable deflating subspace gives rise to the stable symmetric positive definite solution of the DARE. ◮ For a stable λ , | λ | < 1 and λ 2 m → 0 fast, as m → ∞ . ◮ λ 2 m , λ − 2 m grow further apart (relative to the unit circle). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Stable Solution With MJ M ⊤ = LJ L ⊤ , consider y ⊤ M = λ y ⊤ L ⇒ y ⊤ MJ M ⊤ = λ y ⊤ LJ M ⊤ ⇔ ( y ⊤ LJ ) L ⊤ = λ ( y ⊤ LJ ) M ⊤ so λ ∈ σ ( M , L ) ⇔ λ − 1 ∈ σ ( M , L ), or σ ( M , L ) = σ ( L , M ). ◮ Stable deflating subspace gives rise to the stable symmetric positive definite solution of the DARE. ◮ For a stable λ , | λ | < 1 and λ 2 m → 0 fast, as m → ∞ . ◮ λ 2 m , λ − 2 m grow further apart (relative to the unit circle). ◮ Null space of ( M − 1 L ) 2 m ( m → ∞ ) wanted. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Doubling � � � I � A 0 G M = , L = . A ⊤ − H I 0 Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Doubling � � � I � A 0 G M = , L = . A ⊤ − H I 0 � � � � � � L M , � � M , � � ◮ Find L such that L = 0. −M Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Doubling � � � I � A 0 G M = , L = . A ⊤ − H I 0 � � � � � � L M , � � M , � � ◮ Find L such that L = 0. −M ◮ Note that � ML = � LM , thus matrix multiplication is “commutative”! Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Doubling � � � I � A 0 G M = , L = . A ⊤ − H I 0 � � � � � � L M , � � M , � � ◮ Find L such that L = 0. −M ◮ Note that � ML = � LM , thus matrix multiplication is “commutative”! ◮ Doubling: ( � M , � L ) ≡ ( � MM , � LL ), with M x = λ L x ⇒ LM x = λ 2 � LL x = λ 2 � MM x = λ � � ML x ⇒ � M x = λ � L x Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Doubling � � � I � A 0 G M = , L = . A ⊤ − H I 0 � � � � � � L M , � � M , � � ◮ Find L such that L = 0. −M ◮ Note that � ML = � LM , thus matrix multiplication is “commutative”! ◮ Doubling: ( � M , � L ) ≡ ( � MM , � LL ), with M x = λ L x ⇒ LM x = λ 2 � LL x = λ 2 � MM x = λ � � ML x ⇒ � M x = λ � L x ◮ Doubling preserves symplecticity ( not in SSF, in general). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Doubling � � � I � A 0 G M = , L = . A ⊤ − H I 0 � � � � � � L M , � � M , � � ◮ Find L such that L = 0. −M ◮ Note that � ML = � LM , thus matrix multiplication is “commutative”! ◮ Doubling: ( � M , � L ) ≡ ( � MM , � LL ), with M x = λ L x ⇒ LM x = λ 2 � LL x = λ 2 � MM x = λ � � ML x ⇒ � M x = λ � L x ◮ Doubling preserves symplecticity ( not in SSF, in general). � � M , � � ◮ There are many different possibilities for L . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Preserving SSF ◮ Using QR: (Benner/Byers 2001) preserves symplecticity, not in SSF. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Preserving SSF ◮ Using QR: (Benner/Byers 2001) preserves symplecticity, not in SSF. ◮ Use generalized Gaussian elimination, preserves the SSF. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Preserving SSF ◮ Using QR: (Benner/Byers 2001) preserves symplecticity, not in SSF. ◮ Use generalized Gaussian elimination, preserves the SSF. ◮ SDA iteration: � A ( I + GH ) − 1 A ← A � G + AG ( I + HG ) − 1 A ⊤ G ← � H + A ⊤ ( I + HG ) − 1 HA H ← Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Preserving SSF ◮ Using QR: (Benner/Byers 2001) preserves symplecticity, not in SSF. ◮ Use generalized Gaussian elimination, preserves the SSF. ◮ SDA iteration: � A ( I + GH ) − 1 A ← A � G + AG ( I + HG ) − 1 A ⊤ G ← � H + A ⊤ ( I + HG ) − 1 HA H ← ◮ Many nice properties; operation count 15% that of the QR-based algorithm (operating on the 4 n × 2 n matrix [ L ⊤ , −M ⊤ ] ⊤ ). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for Palindromic QEPs ◮ SDA can be applied after deflation, etc. (no details here) Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for Palindromic QEPs ◮ SDA can be applied after deflation, etc. (no details here) ◮ Theoretically, may need to invert ill-conditioned matrices; Cayley transform can be applied but never required numerically. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for Palindromic QEPs ◮ SDA can be applied after deflation, etc. (no details here) ◮ Theoretically, may need to invert ill-conditioned matrices; Cayley transform can be applied but never required numerically. ◮ Quadratic convergence (linear with eigenvalues on unit circle). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for Palindromic QEPs ◮ SDA can be applied after deflation, etc. (no details here) ◮ Theoretically, may need to invert ill-conditioned matrices; Cayley transform can be applied but never required numerically. ◮ Quadratic convergence (linear with eigenvalues on unit circle). ◮ Accurate numerical results. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions SDA for Palindromic QEPs ◮ SDA can be applied after deflation, etc. (no details here) ◮ Theoretically, may need to invert ill-conditioned matrices; Cayley transform can be applied but never required numerically. ◮ Quadratic convergence (linear with eigenvalues on unit circle). ◮ Accurate numerical results. ◮ Twice as expensive as the factorization approach (see below). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Palindromic Factorization Chu/Huang/Lin/Wu 2007 The palindromic factorization: P ( λ ) = ( λ Y − A 1 ) Y − 1 ( λ A 1 − Y ) ⊤ with Y = Y ⊤ satisfying the NME-P: Y + A 1 Y − 1 A ⊤ 1 = − A 0 Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Palindromic Factorization Chu/Huang/Lin/Wu 2007 The palindromic factorization: P ( λ ) = ( λ Y − A 1 ) Y − 1 ( λ A 1 − Y ) ⊤ with Y = Y ⊤ satisfying the NME-P: Y + A 1 Y − 1 A ⊤ 1 = − A 0 ◮ The SDA2 (Lin/Xu 2006) can then be applied. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Palindromic Factorization Chu/Huang/Lin/Wu 2007 The palindromic factorization: P ( λ ) = ( λ Y − A 1 ) Y − 1 ( λ A 1 − Y ) ⊤ with Y = Y ⊤ satisfying the NME-P: Y + A 1 Y − 1 A ⊤ 1 = − A 0 ◮ The SDA2 (Lin/Xu 2006) can then be applied. ◮ The palindromic EVP is then “square-rooted”. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Palindromic Factorization Chu/Huang/Lin/Wu 2007 The palindromic factorization: P ( λ ) = ( λ Y − A 1 ) Y − 1 ( λ A 1 − Y ) ⊤ with Y = Y ⊤ satisfying the NME-P: Y + A 1 Y − 1 A ⊤ 1 = − A 0 ◮ The SDA2 (Lin/Xu 2006) can then be applied. ◮ The palindromic EVP is then “square-rooted”. ◮ Cyclic Reduction (CR) can be applied to the NME-P, or the related quadratic equation: 1 X 2 + A 0 X + A 1 = 0 A ⊤ Eric Chu Structured Doubling Algorithms
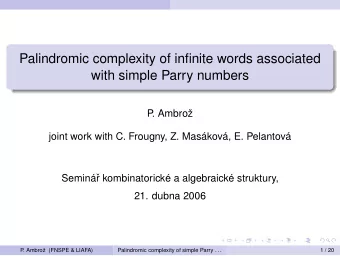
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Eigenvalue Distribution Eric Chu Structured Doubling Algorithms
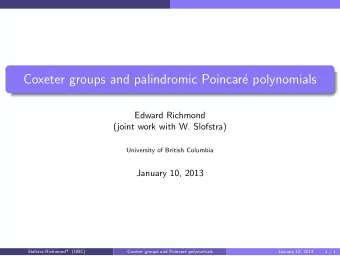
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Convergence ( � Q k +1 − Q k � and � R k � ) Eric Chu Structured Doubling Algorithms
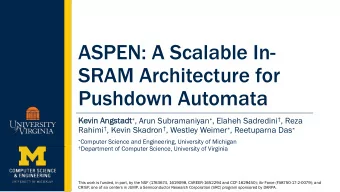
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions (Relative) Residuals of Approximate Eigenpairs ( λ, x ) Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Reciprocal Properties of Eigenvalues ( | λ i λ 2 n − i +1 − 1 | ) Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions ( ∗ , ε )-Homomorphism Definition A function g : C n × n → C n × n is called a ( ∗ , ε )-homomorphism if α ∗ 1 g (Φ 1 ) + α ∗ g ( α 1 Φ 1 + α 2 Φ 2 ) = 2 g (Φ 2 ) g (Φ 1 Φ 2 ) = ε g (Φ 2 ) g (Φ 1 ) for all Φ 1 , Φ 2 ∈ C n × n and α 1 , α 2 ∈ C . Furthermore, g preserves the singularity, i.e., det(Φ) = 0 ⇔ det( g (Φ)) = 0 Here “ ∗ ” denotes “H” (Hermition/conjugate transpose) or “T” (transpose) and ε = ± 1. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Theorem Let g be a ( ∗ , ε ) -homomorphism. Then it holds (i) g (0) = 0 , (ii) g ( I ) = ε I, and (iii) g (Φ − 1 ) = g (Φ) − 1 . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Theorem Let g be a ( ∗ , ε ) -homomorphism. Then it holds (i) g (0) = 0 , (ii) g ( I ) = ε I, and (iii) g (Φ − 1 ) = g (Φ) − 1 . Proof. (i) g (Φ) = g (Φ + 0) = g (Φ) + g (0). Therefore, g (0) = 0. (ii) Let Φ be nonsingular. Then g (Φ) = g (Φ · I ) = ε g ( I ) g (Φ). From det( g (Φ)) � = 0 follows that g ( I ) = ε I . (iii) g ( I ) = g (Φ − 1 · Φ) = ε g (Φ) g (Φ − 1 ). Therefore, from (ii) we get g (Φ − 1 ) = g (Φ) − 1 . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions g-Palindromic QEPs Definition A quadratic eigenvalue problem (QEP) Q ( λ ) ≡ ( λ 2 B + λ C + A ) x = 0 , (2) where A , B , C ∈ C n × n , λ ∈ C , x � = 0 ∈ C n , is called a g-palindromic QEP if there is a ∗ -homomorphism g such that g ( B ) = A , g ( C ) = C and g ( A ) = B . Moreover, A and B are g called g-related (denoted by A ∼ B ) and C is g-symmetric. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Symplecticity Theorem Let Q ( λ ) be a g-palindromic quadratic pencil. Then λ ∈ σ ( Q ( λ )) if and only if 1 /λ ∗ ∈ σ ( Q ( λ )) . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Symplecticity Theorem Let Q ( λ ) be a g-palindromic quadratic pencil. Then λ ∈ σ ( Q ( λ )) if and only if 1 /λ ∗ ∈ σ ( Q ( λ )) . Proof. Without loss of generality, assume that λ � = 0. Then det( λ 2 B + λ C + A ) = det( g ( λ 2 B + λ C + A )) 0 = � � ( λ ∗ ) 2 g ( B ) + λ ∗ g ( C ) + g ( A ) = det � � ( λ ∗ ) 2 A + λ ∗ C + B = det . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions g-NME A quadratic pencil can be factorized as λ 2 B + λ C + A ( λ B + X ) X − 1 ( λ X + A ) = λ 2 B + λ ( X + BX − 1 A ) + A = with X satisfying the nonlinear matrix equation (NME) X + BX − 1 A = C Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions g-NME A quadratic pencil can be factorized as λ 2 B + λ C + A ( λ B + X ) X − 1 ( λ X + A ) = λ 2 B + λ ( X + BX − 1 A ) + A = with X satisfying the nonlinear matrix equation (NME) X + BX − 1 A = C If we can find a solution X for the NME structurally, then the palindromic QEP is solved. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions g-NME A quadratic pencil can be factorized as λ 2 B + λ C + A ( λ B + X ) X − 1 ( λ X + A ) = λ 2 B + λ ( X + BX − 1 A ) + A = with X satisfying the nonlinear matrix equation (NME) X + BX − 1 A = C If we can find a solution X for the NME structurally, then the palindromic QEP is solved. The g-SDA solves g-NMEs, thus g-palindromic QEPs. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions g-SDA For a given g-NME, we define � − D � A � � 0 I M = , L = . − I C B 0 Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions g-SDA For a given g-NME, we define � − D � A � � 0 I M = , L = . − I C B 0 We have the g-SDA: � � A ( C − D ) − 1 A , B = B ( C − D ) − 1 B A = � C − B ( C − D ) − 1 A , D = D + A ( C − D ) − 1 B � C = Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions g-SDA For a given g-NME, we define � − D � A � � 0 I M = , L = . − I C B 0 We have the g-SDA: � � A ( C − D ) − 1 A , B = B ( C − D ) − 1 B A = � C − B ( C − D ) − 1 A , D = D + A ( C − D ) − 1 B � C = � A and � B are g-related, and � C and � D are g-symmetric. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Doubling Theorem (i) The pencil � M − λ � L has the doubling property; i.e., if � U � � U � M = L S , V V where U , V ∈ C n × m and S ∈ C m × m , then � U � � U � � = � S 2 . M L V V (ii) The quadratic pencil λ 2 � B + λ � C + � A corresponding to � M − λ � L is still a g-palindromic quadratic pencil. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Proof. � U � � U � (i) From M = L S and M ∗ L = L ∗ M , we have V V � U � � U � � U � � M = M ∗ M = M ∗ L S V V V � U � � U � S 2 = L ∗ M S = L ∗ L V V � U � � S 2 = L V Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions (ii) Using the properties of g , we have g ( � ε 2 g ( A )( g ( C ) − g ( D )) − 1 g ( A ) = B ( C − D ) − 1 B = � A ) = B , g ( � ε 2 g ( B )( g ( C ) − g ( D )) − 1 g ( B ) = A ( C − D ) − 1 A = � B ) = A , g ( � g ( C ) − ε 2 g ( A )( g ( C ) − g ( D )) − 1 g ( B ) C ) = C − B ( C − D ) − 1 A = � = C , g ( � g ( D ) + ε 2 g ( B )( g ( C ) − g ( D )) − 1 g ( A ) D ) = D + A ( C − D ) − 1 B = � = D . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions (ii) Using the properties of g , we have g ( � ε 2 g ( A )( g ( C ) − g ( D )) − 1 g ( A ) = B ( C − D ) − 1 B = � A ) = B , g ( � ε 2 g ( B )( g ( C ) − g ( D )) − 1 g ( B ) = A ( C − D ) − 1 A = � B ) = A , g ( � g ( C ) − ε 2 g ( A )( g ( C ) − g ( D )) − 1 g ( B ) C ) = C − B ( C − D ) − 1 A = � = C , g ( � g ( D ) + ε 2 g ( B )( g ( C ) − g ( D )) − 1 g ( A ) D ) = D + A ( C − D ) − 1 B = � = D . g Therefore, � ∼ � B , � C and � A D are g-symmetric and λ 2 � B + λ � C + � A is again a g-palindromic quadratic pencil. ✷ Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Convergence with Unimodular Eigenvalues Definition A solution X of a g-NME is said to possess property (P), if (i) ρ ( X − 1 A ) ≤ 1; and (ii) the partial multiplicities of each unimodular eigenvalue of X − 1 A is half of that of the corresponding unimodular eigenvalue of the associated pair ( M , L ). Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Theorem Assume that the g-NME and the dual g-NME have the solutions X and Y with property (P), respectively. Suppose the sequence { A k , B k , C k , D k } generated by the g-SDA is well-defined. Then (i) � A k � = O (2 − k ) → 0 , as k → ∞ , (ii) � B k � = O (2 − k ) → 0 , as k → ∞ , (iii) � C k − X � = O (2 − k ) → 0 , as k → ∞ , (iv) � D k − Y � = O (2 − k ) → 0 , as k → ∞ . Furthermore, X and Y are g-symmetric, i.e., g ( X ) = X and g ( Y ) = Y . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions T/H-Palindromic QEPs If the ( ∗ , ε )-homomorphism is defined by g (Φ) = +Φ ∗ . Then the g-palindromic QEP becomes (i) T-palindromic QEP ( ∗ = “T”): ( λ 2 A ⊤ + λ C + A ) x = 0 with C ⊤ = + C . (ii) H-palindromic QEP ( ∗ = “H”): ( λ 2 A H + λ C + A ) x = 0 with C H = + C . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions T/H-Anti-Palindromic QEPs If the ( ∗ , ε )-homomorphism is defined by g (Φ) = − Φ ∗ . Then the g-palindromic QEP becomes (iii) T-anti-palindromic QEP ( ∗ = “T”): ( λ 2 A ⊤ + λ C − A ) x = 0 with C ⊤ = − C . (iv) H-anti-palindromic QEP ( ∗ = “H”): ( λ 2 A H + λ C − A ) x = 0 with C H = − C . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions The g-SDA for cases (i) and (ii): A , C 0 = C = + C ∗ , D 0 = 0 , A 0 = A k ( C k − D k ) − 1 A k , A k +1 = C k − A ∗ k ( C k − D k ) − 1 A k , C k +1 = D k + A k ( C k − D k ) − 1 A k . D k +1 = Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions The g-SDA for cases (iii) and (iv): A , C 0 = C = − C ∗ , D 0 = 0 , A 0 = A k ( C k − D k ) − 1 A k , A k +1 = C k + A ∗ k ( C k − D k ) − 1 A k , C k +1 = D k − A k ( C k − D k ) − 1 A ∗ D k +1 = k . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Other g-Palindromic QEPs For the ∗ -(anti-)palindromic QEP: ( λ 2 A ∗ + λ C ∓ A ) x = 0 with C ∗ = ± C , Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions Other g-Palindromic QEPs For the ∗ -(anti-)palindromic QEP: ( λ 2 A ∗ + λ C ∓ A ) x = 0 with C ∗ = ± C , The quadratic pencil can be factorized λ A ∗ + λ C ∓ A = ( λ A ∗ + X ) X − 1 ( λ X ∓ A ) where X satisfies the g-NME X ∓ A ∗ X − 1 A = C , C ∗ = ± C . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions If we perform one step of the g-SDA on the above g-NME, then X satisfies C ∗ = ± � X ± � A ∗ X − 1 � A = � � C , C , where A = AC − 1 A , � � C = C ∓ A ∗ C − 1 A , � D = ± AC − 1 A ∗ . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions If we perform one step of the g-SDA on the above g-NME, then X satisfies C ∗ = ± � X ± � A ∗ X − 1 � A = � � C , C , where A = AC − 1 A , � � C = C ∓ A ∗ C − 1 A , � D = ± AC − 1 A ∗ . The g-NME corresponds to the ∗ -(anti-)palindromic QEP A ∗ + λ � ( λ 2 � C ± � A ) x = 0 . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions *-Even/Odd Palindromic QEPs For the QEP Q ( λ ) x ≡ ( λ 2 M + λ G + K ) x = 0 , M ∗ = ± M , K ∗ = ± K , G ∗ = ∓ G , Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions *-Even/Odd Palindromic QEPs For the QEP Q ( λ ) x ≡ ( λ 2 M + λ G + K ) x = 0 , M ∗ = ± M , K ∗ = ± K , G ∗ = ∓ G , It is well-known that Q ( λ ) has the factorization Q ( λ ) = ( λ M + MS + G )( λ I − S ) if and only if S is a solution of the quadratic matrix equation MS 2 + GS + K = 0 . Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions If λ ∈ σ ( Q ( λ )), then − λ ∗ ∈ σ ( Q ( λ )). If x i and y i are, respectively, the right and left eigenvectors corresponding to λ i of the solvant S , i.e., y ∗ i S = λ i y ∗ Sx i = λ i x i , i , (3) then x i and ( λ i M + MS + G ) −∗ y i are eigenvectors corresponding to λ i and − λ ∗ i , respectively, of the QEP. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions It seems difficult to find the solvant S directly whose eigenvalues are on the right half-plane. Instead, the Cayley transformation S = ( I + Y )( I − Y ) − 1 is used. The solvant S then satisfies ε A ∗ Y 2 + CY + A = 0 , (4) where A = M + K + G , C = 2( M − K ), ε = ± 1. With Y = − X − 1 A , we have the NME: X + ε A ∗ X − 1 A = C . The g-SDA can then be applied. Eric Chu Structured Doubling Algorithms
Existing Approaches S + S − 1 Transformation Doubling Factorization g-SDA Conclusions ◮ Palindromic linearization/QZ, Jacobi or QR-like methods for anti-triangular Schur form. Eric Chu Structured Doubling Algorithms
Recommend







More recommend
Explore More Topics
Stay informed with curated content and fresh updates.