Structural analysis for fault diagnosis faults f ( t ) observation y - PowerPoint PPT Presentation
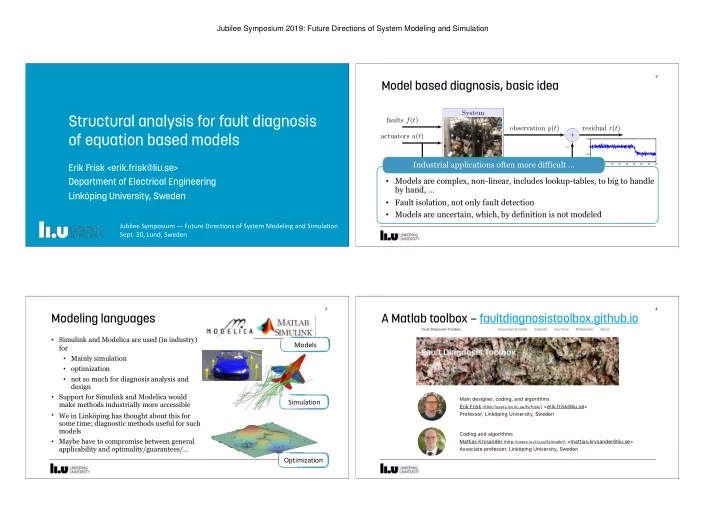
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation 2 Model based diagnosis, basic idea System Structural analysis for fault diagnosis faults f ( t ) observation y ( t ) residual r ( t ) + actuators u ( t ) of equation
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation 2 Model based diagnosis, basic idea System Structural analysis for fault diagnosis faults f ( t ) observation y ( t ) residual r ( t ) + actuators u ( t ) of equation based models 0.5 0 − − 0.5 Industrial applications often more difficult … − 1 0 5 10 15 20 25 30 35 40 45 Erik Frisk <erik.frisk@liu.se> Model • Models are complex, non-linear, includes lookup-tables, to big to handle prediction ˆ y ( t ) Department of Electrical Engineering x = g ( x, u ) ˙ by hand, … Linköping University, Sweden y = h ( x, u ) • Fault isolation, not only fault detection • Models are uncertain, which, by definition is not modeled Jubilee Symposium — Future Direc4ons of System Modeling and Simula4on Sept. 30, Lund, Sweden 3 4 Modeling languages A Matlab toolbox — faultdiagnosistoolbox.github.io • Simulink and Modelica are used (in industry) Models for • Mainly simulation • optimization • not so much for diagnosis analysis and design • Support for Simulink and Modelica would Main designer, coding, and algorithms Simulation make methods industrially more accessible Erik Frisk (http://users.isy.liu.se/fs/frisk/) <erik.frisk@liu.se> • We in Linköping has thought about this for Professor, Linköping University, Sweden some time; diagnostic methods useful for such models Coding and algorithms • Maybe have to compromise between general Mattias Krysander (http://users.isy.liu.se/fs/matkr/) <mattias.krysander@liu.se> applicability and optimality/guarantees/… Associate professor, Linköping University, Sweden Optimization
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation 5 6 DAEs and equation based models for diagnosis Basic approach to diagnosis system design • Non-causal models — inherent in the diagnosis problem • A signal is known or unknown; it does not matter if it is an input or Model output signal to the system • — unknown, known, and fault signals x , z , f F (· x , x , z , f ) = 0 • Submodels — inherently differential-algebraic · x 1 = f 1 ( x 1 , x 2 , z , f ) Sub-model · · x 1 = f 1 ( x 1 , x 2 , z , f ) Residual x 2 = f 2 ( x 1 , x 2 , z , f ) With Generator y 1 = h 1 ( x 1 , x 2 , z , f ) y 1 = h 1 ( x 1 , x 2 , z , f ) Redundancy y 2 = h 2 ( x 1 , x 2 , z , f ) 8 7 Differential index and diagnosis filter design Structural models • Standard definition on differential index is for just-determined models but Structural model can be directly extended to over-determined models, i.e., models with A structural model only models that variables are related! redundancy, · Example relating variables: V , i , ω x 1 = f 1 ( x 1 , x 2 , z , f ) e 1 : V = iR (1 + f R ) + L di dt + K a i ω y 1 = h 1 ( x 1 , x 2 , z , f ) • If sub-model is low-index, standard observer design techniques can be Unknown variables i θ ω α T T m T l f R f i f ω f T V y i y ω y T utilized for a fault detector in the form X X X X · ̂ e 1 x 1 = g 1 ( ̂ x 1 , ̂ x 2 , z ) + Kg r ( ̂ x 1 , ̂ x 2 , z ) Coarse model description, no parameters or analytical expressions 0 = g a ( ̂ x 1 , ̂ x 2 , z ) Can be obtained early in design process with little engineering e ff ort r = g r ( ̂ x 1 , ̂ x 2 , z ) Large-scale model analysis possible using graph theoretical tools • Thus low-index sub-models are of particular interest for detector synthesis Very useful!
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation 9 10 Structural representation of engine model Fundamental algorithmic tool: Dulmage-Mendelsohn decomposition Engine model e1 e2 e3 e4 X 0 X 1 X 2 X n − 1 X n X ∞ e5 · · · e6 e7 e8 e9 • Basic tool in many structural e10 e11 e12 e13 e14 I D e15 I D analysis algorithms b 0 e16 M − e17 e18 e19 I D e20 e21 I D e22 e23 e24 I D • Smart reordering or e25 I D e26 e27 e28 e29 I D e30 I D e31 rows(equations) and columns b 1 e32 e33 e34 I D e35 I D e36 e37 (variables) e38 e39 I D e40 I D e41 b 2 e42 e43 e44 e45 e46 • Partitions the model into three e47 e48 e49 e50 e51 M 0 e52 ... e53 parts e54 e55 e56 e57 e58 e59 e60 e61 b n − 1 e62 • Under determined e63 e64 e65 e66 e67 e68 e69 e70 e71 • Exactly determined b n e72 e73 • Incidence matrix of variable e74 e75 e76 e77 e78 e79 dependency graph e80 I D • Over determined e81 e82 e83 e84 I D e85 e86 e87 • Edges represents connections e88 e89 • The overdetermined part with e90 e91 M + b ∞ e92 e93 e94 redundancy is the one interesting W_es W_e T_em PSI_c DELTA_theta Tq_e_f Tq_e_p W_ac y_W_af y_T_amb • I/D-edges correspond to W_af p_t p_ic T_ic W_ic W_th Aeff_th W_wg Aeff_wg T_af p_af W_c T_cout T_c p_c T_imcr p_im T_im T_ti p_em dh_is W_twg T_turb T_t alpha_th omega_e W_ig W_fr Tq_c eta_c omega_tc PI_c W_t Tq_t eta_t PI_t u_wg wg_pos T_e T_amb p_amb PSI_th PI_wg PSIli_wg m_af m_c m_ic T_fwd_flow_ic m_im m_em m_t PI_cnolim U_c PHI_model W_ccorr Tq_e_cs Tq_e_cb eta_ign W_i_p FMEP S_p BMEP C_eta_vol T_in eta_vol W_fc T_tout Tflow_wg dmdt_af dTdt_af dmdt_c dTdt_c dmdt_ic dTdt_ic dmdt_im dTdt_im dmdt_em dTdt_em dmdt_t dTdt_t dwgdt_pos fp_af fw_af fw_th fw_c fc_vol fw_t fx_th fyw_af fyp_im fyp_ic fyT_ic y_p_ic y_p_im y_T_ic y_omega_e y_alpha_th y_u_wg y_wfc y_p_amb domegadt_tc for diagnosis differentiation and integration 11 Outline of the talk 1. Diagnosability and sensor placement analysis 2. Testable (sub-)models and detector synthesis 3. A Modelica perspective 4. An automotive use-case Diagnosability analysis and sensor selection Presentation will be more what than how
Jubilee Symposium 2019: Future Directions of System Modeling and Simulation 13 14 Diagnosability analysis - Problem formulation Structurally detectable and isolable faults Engine model e1 e2 e3 e4 • Given a dynamic model e5 e6 e7 e8 • Let be the equation that is affected by fault e9 e f i f i e10 e11 e12 e13 e14 I D e15 • Q1: Which faults are I D e16 e17 e18 e19 I D X 0 X 1 X 2 X n − 1 X n X ∞ e20 I D e21 · · · • A fault is (structurally) detectable iff e22 f i e23 structurally detectable? e24 I D e25 I D e26 e27 e28 e29 I D M 0 b 0 e30 I D e31 e32 e f i ∈ M + e33 • Q2: What are the structural e34 I D e35 I D e36 e37 e38 e39 I D e40 I D e41 isolability properties of the e42 M 1 b 1 e43 e44 e45 e46 e47 e48 • Fault not detectable, is detectable model? e49 f 1 f 2 e50 e51 M 2 b 2 e52 e53 e54 e55 e56 e57 e58 e59 • A fault is isolable form a fault iff e60 . ... e61 f i f j e62 . . e63 e64 e65 e66 e67 e68 M n − 1 b n − 1 f 1 e69 e70 e f i ∈ ( M ∖ e f j ) + e71 e72 e73 e74 e75 e76 M n b n e77 e78 e79 e80 I D e81 e82 e83 • Take home: Structural diagnosability can be e84 I D e85 e86 e87 e88 e89 e90 e91 determined by a series of e92 e93 e94 M ∞ f 2 b ∞ W_af W_es W_th W_e T_em T_t PSI_c DELTA_theta Tq_e_cs Tq_e_f Tq_e_p W_i_p T_in W_ac y_T_ic y_W_af y_u_wg y_T_amb p_t p_ic T_ic W_ic Aeff_th W_wg Aeff_wg T_af p_af W_c T_cout T_c p_c T_imcr p_im T_im T_ti p_em dh_is W_twg T_turb alpha_th omega_e W_ig W_fr Tq_c eta_c omega_tc PI_c W_t Tq_t eta_t PI_t u_wg wg_pos T_e T_amb p_amb PSI_th PI_wg PSIli_wg m_af m_c m_ic T_fwd_flow_ic m_im m_em m_t PI_cnolim U_c PHI_model W_ccorr Tq_e_cb eta_ign FMEP S_p BMEP C_eta_vol eta_vol W_fc T_tout Tflow_wg dmdt_af dTdt_af dmdt_c dTdt_c dmdt_ic dTdt_ic dmdt_im dTdt_im dmdt_em dTdt_em dmdt_t dTdt_t domegadt_tc dwgdt_pos fp_af fw_af fw_th fw_c fc_vol fw_t fx_th fyw_af fyp_im fyp_ic fyT_ic y_p_ic y_p_im y_omega_e y_alpha_th y_wfc y_p_amb Dulmage-Mendelsohn decompositions (fast) 15 16 A more detailed structure decomposition Diagnosability of an engine model Dulmage-Mendelsohn decomposition of model 'SECS' Dulmage-Mendelsohn decomposition of model 'SECS' 0 0 Isolability matrix for 'Engine model' 50 100 100 fp_af 150 fw_af 200 200 Injected fault fw_th 250 300 300 fw_c 350 D I D D D I D I D I D I D I D fc_vol I I I Equations 400 Equations 400 D I D D I D D I D I D I D I D I D fw_t I D I D ID I D 450 ID ID I D I D I D I D I D I D I D I D 500 I D I D I D fx_th 500 I D I D I D ID ID ID ID ID ID I D I D I D D I I f21 f22 I I D I 550 D D I I I I D D f21 f22 f18 fyw_af f1 600 f4 f7 f8 f5 600 f6 f3 D I D I f16 f14 f13 f11 f17 f9 f7 f5 f19 fyp_im f1 f8 f10 f15 650 f2 D I f12 fyp_ic 700 D I D I 700 D I 750 fyT_ic f12 800 I D D I 800 D I D I D D I I f4 f2 D I I D f3 f13 f16 fp_af fw_af fw_th fw_c fc_vol fw_t fx_th fyw_affyp_imfyp_ic fyT_ic 850 f17 f9 f11 I D f15 f10 f20 f19 f14 f6 f20 f18 Diagnoses 0 100 200 300 400 500 600 700 800 0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 Variables Variables
Recommend












More recommend
Explore More Topics
Stay informed with curated content and fresh updates.