Sticky particles with interaction Giuseppe Savar e - PowerPoint PPT Presentation
Sticky particles Cumulative distribution Lagrangian representation Sticky particles with interaction Giuseppe Savar e http://www.imati.cnr.it/ savare Department of Mathematics, University of Pavia, Italy HYP2012 - Padova, June 26, 2012
Sticky particles Cumulative distribution Lagrangian representation Starting point: motion of a finite number of particles. Discrete particle model N particles P i := ( m i , x i , v i ), i = 1 , . . . , N , with positive mass m i satisfying � N i =1 m i = 1 ordered positions x 1 < x 2 < . . . < x N − 1 < x N , and velocities v i . P 1 P 2 P 3 P 4 At the initial time t = 0 the particles are disjoint and start to move according to the system of ODE’s d d d tx i ( t ) = v i ( t ) , d tv i ( t ) = a i ( x ( t )) . The first collision time t = t 1 correspond to x j ( t 1 ) = x j +1 ( t 1 ) = . . . = x k ( t 1 ) for some indices j < k . The particles P j , P j +1 , . . . , P k collapse and stick in a new particle P with mass m := m j + . . . + m k and v := m j v j ( t 1 ) + m j +1 v j +1 ( t 1 ) + . . . + m k v k ( t 1 ) “barycentric” velocity m 6
Sticky particles Cumulative distribution Lagrangian representation Starting point: motion of a finite number of particles. Discrete particle model N particles P i := ( m i , x i , v i ), i = 1 , . . . , N , with positive mass m i satisfying � N i =1 m i = 1 ordered positions x 1 < x 2 < . . . < x N − 1 < x N , and velocities v i . P 1 P 2 P 3 P 4 At the initial time t = 0 the particles are disjoint and start to move according to the system of ODE’s d d d tx i ( t ) = v i ( t ) , d tv i ( t ) = a i ( x ( t )) . The first collision time t = t 1 correspond to x j ( t 1 ) = x j +1 ( t 1 ) = . . . = x k ( t 1 ) for some indices j < k . The particles P j , P j +1 , . . . , P k collapse and stick in a new particle P with mass m := m j + . . . + m k and v := m j v j ( t 1 ) + m j +1 v j +1 ( t 1 ) + . . . + m k v k ( t 1 ) “barycentric” velocity m 6
Sticky particles Cumulative distribution Lagrangian representation Starting point: motion of a finite number of particles. Discrete particle model N particles P i := ( m i , x i , v i ), i = 1 , . . . , N , with positive mass m i satisfying � N i =1 m i = 1 ordered positions x 1 < x 2 < . . . < x N − 1 < x N , and velocities v i . P 1 P 2 P 3 At the initial time t = 0 the particles are disjoint and start to move according to the system of ODE’s d d d tx i ( t ) = v i ( t ) , d tv i ( t ) = a i ( x ( t )) . The first collision time t = t 1 correspond to x j ( t 1 ) = x j +1 ( t 1 ) = . . . = x k ( t 1 ) for some indices j < k . The particles P j , P j +1 , . . . , P k collapse and stick in a new particle P with mass m := m j + . . . + m k and v := m j v j ( t 1 ) + m j +1 v j +1 ( t 1 ) + . . . + m k v k ( t 1 ) “barycentric” velocity m 6
Sticky particles Cumulative distribution Lagrangian representation Starting point: motion of a finite number of particles. Discrete particle model N particles P i := ( m i , x i , v i ), i = 1 , . . . , N , with positive mass m i satisfying � N i =1 m i = 1 ordered positions x 1 < x 2 < . . . < x N − 1 < x N , and velocities v i . P 1 P 2 P 3 At the initial time t = 0 the particles are disjoint and start to move according to the system of ODE’s d d d tx i ( t ) = v i ( t ) , d tv i ( t ) = a i ( x ( t )) . The first collision time t = t 1 correspond to x j ( t 1 ) = x j +1 ( t 1 ) = . . . = x k ( t 1 ) for some indices j < k . The particles P j , P j +1 , . . . , P k collapse and stick in a new particle P with mass m := m j + . . . + m k and v := m j v j ( t 1 ) + m j +1 v j +1 ( t 1 ) + . . . + m k v k ( t 1 ) “barycentric” velocity m 6
Sticky particles Cumulative distribution Lagrangian representation Starting point: motion of a finite number of particles. Discrete particle model N particles P i := ( m i , x i , v i ), i = 1 , . . . , N , with positive mass m i satisfying � N i =1 m i = 1 ordered positions x 1 < x 2 < . . . < x N − 1 < x N , and velocities v i . P 1 P 2 At the initial time t = 0 the particles are disjoint and start to move according to the system of ODE’s d d d tx i ( t ) = v i ( t ) , d tv i ( t ) = a i ( x ( t )) . The first collision time t = t 1 correspond to x j ( t 1 ) = x j +1 ( t 1 ) = . . . = x k ( t 1 ) for some indices j < k . The particles P j , P j +1 , . . . , P k collapse and stick in a new particle P with mass m := m j + . . . + m k and v := m j v j ( t 1 ) + m j +1 v j +1 ( t 1 ) + . . . + m k v k ( t 1 ) “barycentric” velocity m 6
Sticky particles Cumulative distribution Lagrangian representation Starting point: motion of a finite number of particles. Discrete particle model N particles P i := ( m i , x i , v i ), i = 1 , . . . , N , with positive mass m i satisfying � N i =1 m i = 1 ordered positions x 1 < x 2 < . . . < x N − 1 < x N , and velocities v i . P 1 P 2 At the initial time t = 0 the particles are disjoint and start to move according to the system of ODE’s d d d tx i ( t ) = v i ( t ) , d tv i ( t ) = a i ( x ( t )) . The first collision time t = t 1 correspond to x j ( t 1 ) = x j +1 ( t 1 ) = . . . = x k ( t 1 ) for some indices j < k . The particles P j , P j +1 , . . . , P k collapse and stick in a new particle P with mass m := m j + . . . + m k and v := m j v j ( t 1 ) + m j +1 v j +1 ( t 1 ) + . . . + m k v k ( t 1 ) “barycentric” velocity m 6
Sticky particles Cumulative distribution Lagrangian representation Starting point: motion of a finite number of particles. Discrete particle model N particles P i := ( m i , x i , v i ), i = 1 , . . . , N , with positive mass m i satisfying � N i =1 m i = 1 ordered positions x 1 < x 2 < . . . < x N − 1 < x N , and velocities v i . P 1 P 2 At the initial time t = 0 the particles are disjoint and start to move according to the system of ODE’s d d d tx i ( t ) = v i ( t ) , d tv i ( t ) = a i ( x ( t )) . The first collision time t = t 1 correspond to x j ( t 1 ) = x j +1 ( t 1 ) = . . . = x k ( t 1 ) for some indices j < k . The particles P j , P j +1 , . . . , P k collapse and stick in a new particle P with mass m := m j + . . . + m k and v := m j v j ( t 1 ) + m j +1 v j +1 ( t 1 ) + . . . + m k v k ( t 1 ) “barycentric” velocity m 6
Sticky particles Cumulative distribution Lagrangian representation Measure-theoretic description We thus have: a (finite) sequence of collision times 0 < t 1 < t 2 < . . . in each interval [ t h , t h +1 ) a finite number N h of (suitably relabeled) particles P 1 ( t ) , · · · , P N h ( t ), P i ( t ) := ( m i , x i ( t ) , v i ( t )). We can introduce the measures N h N h � � ̺ t := m i δ x i ( t ) ∈ P ( R ) , ( ̺ v ) t := m i v i ( t ) δ x i ( t ) ∈ M ( R ) i =1 i =1 if t ∈ [ t h , t h +1 ) . N h � f [ ̺ t ] := m i a i ( t ) δ x i ( t ) ∈ M ( R ) i =1 They satisfy the 1 -dimensional pressureless Euler system in the sense of distributions � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , in R × (0 , + ∞ ); ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 7
Sticky particles Cumulative distribution Lagrangian representation Measure-theoretic description We thus have: a (finite) sequence of collision times 0 < t 1 < t 2 < . . . in each interval [ t h , t h +1 ) a finite number N h of (suitably relabeled) particles P 1 ( t ) , · · · , P N h ( t ), P i ( t ) := ( m i , x i ( t ) , v i ( t )). We can introduce the measures N h N h � � ̺ t := m i δ x i ( t ) ∈ P ( R ) , ( ̺ v ) t := m i v i ( t ) δ x i ( t ) ∈ M ( R ) i =1 i =1 if t ∈ [ t h , t h +1 ) . N h � f [ ̺ t ] := m i a i ( t ) δ x i ( t ) ∈ M ( R ) i =1 They satisfy the 1 -dimensional pressureless Euler system in the sense of distributions � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , in R × (0 , + ∞ ); ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 7
Sticky particles Cumulative distribution Lagrangian representation Measure-theoretic description We thus have: a (finite) sequence of collision times 0 < t 1 < t 2 < . . . in each interval [ t h , t h +1 ) a finite number N h of (suitably relabeled) particles P 1 ( t ) , · · · , P N h ( t ), P i ( t ) := ( m i , x i ( t ) , v i ( t )). We can introduce the measures N h N h � � ̺ t := m i δ x i ( t ) ∈ P ( R ) , ( ̺ v ) t := m i v i ( t ) δ x i ( t ) ∈ M ( R ) i =1 i =1 if t ∈ [ t h , t h +1 ) . N h � f [ ̺ t ] := m i a i ( t ) δ x i ( t ) ∈ M ( R ) i =1 They satisfy the 1 -dimensional pressureless Euler system in the sense of distributions � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , in R × (0 , + ∞ ); ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 7
Sticky particles Cumulative distribution Lagrangian representation The various models Motion driven by a potential V d d tx i = v i , � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , � d ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = − ̺∂ x V d tv i = − ∂ x V ( x i ) Motion driven by an interaction potential W d d tx i = v i , � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , d � ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = − ̺ � � ̺ ∗ ∂ x W � d tv i = − m j ∂ x W ( x i − x j ) j � = i Non smooth interaction: the Euler-Poisson system when W ( x ) = ± λ | x | . 8
Sticky particles Cumulative distribution Lagrangian representation The various models Motion driven by a potential V d d tx i = v i , � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , � d ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = − ̺∂ x V d tv i = − ∂ x V ( x i ) Motion driven by an interaction potential W d d tx i = v i , � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , d � ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = − ̺ � � ̺ ∗ ∂ x W � d tv i = − m j ∂ x W ( x i − x j ) j � = i Non smooth interaction: the Euler-Poisson system when W ( x ) = ± λ | x | . 8
Sticky particles Cumulative distribution Lagrangian representation The various models Motion driven by a potential V d d tx i = v i , � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , � d ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = − ̺∂ x V d tv i = − ∂ x V ( x i ) Motion driven by an interaction potential W d d tx i = v i , � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , d � ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = − ̺ � � ̺ ∗ ∂ x W � d tv i = − m j ∂ x W ( x i − x j ) j � = i Non smooth interaction: the Euler-Poisson system when W ( x ) = ± λ | x | . 8
Sticky particles Cumulative distribution Lagrangian representation Main problem: continuous limit Consider a sequence of discrete initial data µ n 0 := ( ̺ n 0 , ̺ n 0 v n 0 ) converging to µ 0 = ( ̺ 0 , ̺ 0 v 0 ) in a suitable measure-theoretic sense and let µ n t = ( ̺ n t , ̺ n t v n t ) be the (discrete) solution of SPS. Problem ◮ Prove that the limit µ t = ( ̺ t , ̺ t v t ) of the SPS µ n t = ( ̺ n t , ̺ n t v n t ) as n ↑ + ∞ exists. ◮ Find a suitable characterization of µ t ◮ Show that ( ̺ t , ̺ t v t ) solves the pressureless Euler system � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , in R × (0 , + ∞ ); ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 9
Sticky particles Cumulative distribution Lagrangian representation Main problem: continuous limit Consider a sequence of discrete initial data µ n 0 := ( ̺ n 0 , ̺ n 0 v n 0 ) converging to µ 0 = ( ̺ 0 , ̺ 0 v 0 ) in a suitable measure-theoretic sense and let µ n t = ( ̺ n t , ̺ n t v n t ) be the (discrete) solution of SPS. Problem ◮ Prove that the limit µ t = ( ̺ t , ̺ t v t ) of the SPS µ n t = ( ̺ n t , ̺ n t v n t ) as n ↑ + ∞ exists. ◮ Find a suitable characterization of µ t ◮ Show that ( ̺ t , ̺ t v t ) solves the pressureless Euler system � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , in R × (0 , + ∞ ); ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 9
Sticky particles Cumulative distribution Lagrangian representation Main problem: continuous limit Consider a sequence of discrete initial data µ n 0 := ( ̺ n 0 , ̺ n 0 v n 0 ) converging to µ 0 = ( ̺ 0 , ̺ 0 v 0 ) in a suitable measure-theoretic sense and let µ n t = ( ̺ n t , ̺ n t v n t ) be the (discrete) solution of SPS. Problem ◮ Prove that the limit µ t = ( ̺ t , ̺ t v t ) of the SPS µ n t = ( ̺ n t , ̺ n t v n t ) as n ↑ + ∞ exists. ◮ Find a suitable characterization of µ t ◮ Show that ( ̺ t , ̺ t v t ) solves the pressureless Euler system � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , in R × (0 , + ∞ ); ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 9
Sticky particles Cumulative distribution Lagrangian representation Main problem: continuous limit Consider a sequence of discrete initial data µ n 0 := ( ̺ n 0 , ̺ n 0 v n 0 ) converging to µ 0 = ( ̺ 0 , ̺ 0 v 0 ) in a suitable measure-theoretic sense and let µ n t = ( ̺ n t , ̺ n t v n t ) be the (discrete) solution of SPS. Problem ◮ Prove that the limit µ t = ( ̺ t , ̺ t v t ) of the SPS µ n t = ( ̺ n t , ̺ n t v n t ) as n ↑ + ∞ exists. ◮ Find a suitable characterization of µ t ◮ Show that ( ̺ t , ̺ t v t ) solves the pressureless Euler system � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , in R × (0 , + ∞ ); ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 9
Sticky particles Cumulative distribution Lagrangian representation Outline 1 A one-dimensional fluid flow and the sticky particle model 2 Free motion: representation formulas by the cumulative distribution function 3 Monotone rearrangement and Lagrangian representation 10
Sticky particles Cumulative distribution Lagrangian representation Main contributions in the case f [ ̺ ] ≡ 0 • Existence and convergence ◮ Grenier ’95 , E-Rykov-Sinai ’96 : first existence and convergence result. ◮ Brenier-Grenier ’96 : Characterization of the limit in terms of a suitable scalar conservation law, uniqueness. ◮ Huang-Wang ’01, Nguyen-Tudorascu ’08, Moutsinga ’08 : further refinements. Gangbo-Nguyen-Tudorascu ’09 : Euler-Poisson. Basic assumptions: ̺ n 0 → ̺ 0 in the L 2 -Wasserstein distance, v n 0 = v 0 is given by a continuous function with (at most) linear growth. In particular the result cover the case when ̺ n 0 , ̺ 0 have a common compact support and ̺ n 0 → ̺ 0 weakly in the sense of distribution (or, equivalently, in the duality with continuous functions). • Pioneering ideas which lies (more or less explicitly) at the core of the papers by E-Rykov-Sinai and Brenier-Grenier have been introduced by ◮ Shnirelman ’86 and further clarified by ◮ Andrievwsky-Gurbatov-Soboelvski˘ ı ’07 in a formal way. • Different approaches and models: ◮ Bouchut-James ’95 , Poupaud-Rascle ’97 ◮ Sobolevski˘ ı ’97 , Boudin ’00 : viscous regularization. ◮ Wolansky ’07 : particles with finite size. 11
Sticky particles Cumulative distribution Lagrangian representation Main contributions in the case f [ ̺ ] ≡ 0 • Existence and convergence ◮ Grenier ’95 , E-Rykov-Sinai ’96 : first existence and convergence result. ◮ Brenier-Grenier ’96 : Characterization of the limit in terms of a suitable scalar conservation law, uniqueness. ◮ Huang-Wang ’01, Nguyen-Tudorascu ’08, Moutsinga ’08 : further refinements. Gangbo-Nguyen-Tudorascu ’09 : Euler-Poisson. Basic assumptions: ̺ n 0 → ̺ 0 in the L 2 -Wasserstein distance, v n 0 = v 0 is given by a continuous function with (at most) linear growth. In particular the result cover the case when ̺ n 0 , ̺ 0 have a common compact support and ̺ n 0 → ̺ 0 weakly in the sense of distribution (or, equivalently, in the duality with continuous functions). • Pioneering ideas which lies (more or less explicitly) at the core of the papers by E-Rykov-Sinai and Brenier-Grenier have been introduced by ◮ Shnirelman ’86 and further clarified by ◮ Andrievwsky-Gurbatov-Soboelvski˘ ı ’07 in a formal way. • Different approaches and models: ◮ Bouchut-James ’95 , Poupaud-Rascle ’97 ◮ Sobolevski˘ ı ’97 , Boudin ’00 : viscous regularization. ◮ Wolansky ’07 : particles with finite size. 11
Sticky particles Cumulative distribution Lagrangian representation Main contributions in the case f [ ̺ ] ≡ 0 • Existence and convergence ◮ Grenier ’95 , E-Rykov-Sinai ’96 : first existence and convergence result. ◮ Brenier-Grenier ’96 : Characterization of the limit in terms of a suitable scalar conservation law, uniqueness. ◮ Huang-Wang ’01, Nguyen-Tudorascu ’08, Moutsinga ’08 : further refinements. Gangbo-Nguyen-Tudorascu ’09 : Euler-Poisson. Basic assumptions: ̺ n 0 → ̺ 0 in the L 2 -Wasserstein distance, v n 0 = v 0 is given by a continuous function with (at most) linear growth. In particular the result cover the case when ̺ n 0 , ̺ 0 have a common compact support and ̺ n 0 → ̺ 0 weakly in the sense of distribution (or, equivalently, in the duality with continuous functions). • Pioneering ideas which lies (more or less explicitly) at the core of the papers by E-Rykov-Sinai and Brenier-Grenier have been introduced by ◮ Shnirelman ’86 and further clarified by ◮ Andrievwsky-Gurbatov-Soboelvski˘ ı ’07 in a formal way. • Different approaches and models: ◮ Bouchut-James ’95 , Poupaud-Rascle ’97 ◮ Sobolevski˘ ı ’97 , Boudin ’00 : viscous regularization. ◮ Wolansky ’07 : particles with finite size. 11
Sticky particles Cumulative distribution Lagrangian representation Main contributions in the case f [ ̺ ] ≡ 0 • Existence and convergence ◮ Grenier ’95 , E-Rykov-Sinai ’96 : first existence and convergence result. ◮ Brenier-Grenier ’96 : Characterization of the limit in terms of a suitable scalar conservation law, uniqueness. ◮ Huang-Wang ’01, Nguyen-Tudorascu ’08, Moutsinga ’08 : further refinements. Gangbo-Nguyen-Tudorascu ’09 : Euler-Poisson. Basic assumptions: ̺ n 0 → ̺ 0 in the L 2 -Wasserstein distance, v n 0 = v 0 is given by a continuous function with (at most) linear growth. In particular the result cover the case when ̺ n 0 , ̺ 0 have a common compact support and ̺ n 0 → ̺ 0 weakly in the sense of distribution (or, equivalently, in the duality with continuous functions). • Pioneering ideas which lies (more or less explicitly) at the core of the papers by E-Rykov-Sinai and Brenier-Grenier have been introduced by ◮ Shnirelman ’86 and further clarified by ◮ Andrievwsky-Gurbatov-Soboelvski˘ ı ’07 in a formal way. • Different approaches and models: ◮ Bouchut-James ’95 , Poupaud-Rascle ’97 ◮ Sobolevski˘ ı ’97 , Boudin ’00 : viscous regularization. ◮ Wolansky ’07 : particles with finite size. 11
Sticky particles Cumulative distribution Lagrangian representation Main contributions in the case f [ ̺ ] ≡ 0 • Existence and convergence ◮ Grenier ’95 , E-Rykov-Sinai ’96 : first existence and convergence result. ◮ Brenier-Grenier ’96 : Characterization of the limit in terms of a suitable scalar conservation law, uniqueness. ◮ Huang-Wang ’01, Nguyen-Tudorascu ’08, Moutsinga ’08 : further refinements. Gangbo-Nguyen-Tudorascu ’09 : Euler-Poisson. Basic assumptions: ̺ n 0 → ̺ 0 in the L 2 -Wasserstein distance, v n 0 = v 0 is given by a continuous function with (at most) linear growth. In particular the result cover the case when ̺ n 0 , ̺ 0 have a common compact support and ̺ n 0 → ̺ 0 weakly in the sense of distribution (or, equivalently, in the duality with continuous functions). • Pioneering ideas which lies (more or less explicitly) at the core of the papers by E-Rykov-Sinai and Brenier-Grenier have been introduced by ◮ Shnirelman ’86 and further clarified by ◮ Andrievwsky-Gurbatov-Soboelvski˘ ı ’07 in a formal way. • Different approaches and models: ◮ Bouchut-James ’95 , Poupaud-Rascle ’97 ◮ Sobolevski˘ ı ’97 , Boudin ’00 : viscous regularization. ◮ Wolansky ’07 : particles with finite size. 11
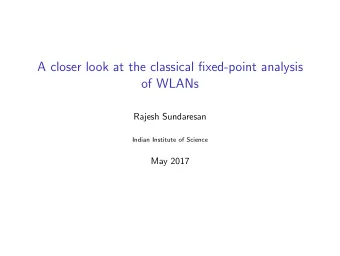
Sticky particles Cumulative distribution Lagrangian representation The cumulative distribution function For every probability measure ̺ ∈ P ( R ) 4 � m 2 A discrete measure ρ = m j δ x j j =1 m 3 m 1 m 4 x 1 x 2 x 3 x 4 x 12
Sticky particles Cumulative distribution Lagrangian representation The cumulative distribution function For every probability measure ̺ ∈ P ( R ) 4 � m 2 A discrete measure ρ = m j δ x j j =1 m 3 m 1 m 4 x 1 x 2 x 3 x 4 x � � we introduce the distribution function M ρ ( x ) := ρ ( −∞ , x ] , Total mass = 1 Its distribution function M ρ x 2 x 3 x 4 x x 1 12
Sticky particles Cumulative distribution Lagrangian representation The Brenier-Grenier formulation in the absence of force in D ′ ( R ) . � � M ̺ ( x ) := ̺ ( −∞ , x ] , x ∈ R , so that ̺ = ∂ x M ̺ Main idea: study the evolution of M t := M ̺ t , where ̺ t is the solution of the SPS. Theorem (Brenier-Grenier ’96) M is the unique entropy solution of the scalar conservation law ∂ t M + ∂ x A ( M ) = 0 in R × (0 , + ∞ ) where A : [0 , 1] → R is a continuous flux function depending only on the initial data ̺ 0 and v 0 . It is characterized by A ′ ( M 0 ( x )) = v 0 ( x ) . 13
Sticky particles Cumulative distribution Lagrangian representation The Brenier-Grenier formulation in the absence of force in D ′ ( R ) . � � M ̺ ( x ) := ̺ ( −∞ , x ] , x ∈ R , so that ̺ = ∂ x M ̺ Main idea: study the evolution of M t := M ̺ t , where ̺ t is the solution of the SPS. Theorem (Brenier-Grenier ’96) M is the unique entropy solution of the scalar conservation law ∂ t M + ∂ x A ( M ) = 0 in R × (0 , + ∞ ) where A : [0 , 1] → R is a continuous flux function depending only on the initial data ̺ 0 and v 0 . It is characterized by A ′ ( M 0 ( x )) = v 0 ( x ) . 13
Sticky particles Cumulative distribution Lagrangian representation The Brenier-Grenier formulation in the absence of force in D ′ ( R ) . � � M ̺ ( x ) := ̺ ( −∞ , x ] , x ∈ R , so that ̺ = ∂ x M ̺ Main idea: study the evolution of M t := M ̺ t , where ̺ t is the solution of the SPS. Theorem (Brenier-Grenier ’96) M is the unique entropy solution of the scalar conservation law ∂ t M + ∂ x A ( M ) = 0 in R × (0 , + ∞ ) where A : [0 , 1] → R is a continuous flux function depending only on the initial data ̺ 0 and v 0 . It is characterized by A ′ ( M 0 ( x )) = v 0 ( x ) . 13
Sticky particles Cumulative distribution Lagrangian representation The Brenier-Grenier formulation in the absence of force in D ′ ( R ) . � � M ̺ ( x ) := ̺ ( −∞ , x ] , x ∈ R , so that ̺ = ∂ x M ̺ Main idea: study the evolution of M t := M ̺ t , where ̺ t is the solution of the SPS. Theorem (Brenier-Grenier ’96) M is the unique entropy solution of the scalar conservation law ∂ t M + ∂ x A ( M ) = 0 in R × (0 , + ∞ ) where A : [0 , 1] → R is a continuous flux function depending only on the initial data ̺ 0 and v 0 . It is characterized by A ′ ( M 0 ( x )) = v 0 ( x ) . 13
Sticky particles Cumulative distribution Lagrangian representation Outline 1 A one-dimensional fluid flow and the sticky particle model 2 Free motion: representation formulas by the cumulative distribution function 3 Monotone rearrangement and Lagrangian representation 14
Sticky particles Cumulative distribution Lagrangian representation Monotone rearrangement ρ m 2 m 3 m 1 m 4 x x 1 x 2 x 3 x 4 15
Sticky particles Cumulative distribution Lagrangian representation Monotone rearrangement ρ m 2 m 3 m 1 m 4 x x 1 x 2 x 3 x 4 The distribution function M ρ Mass = 1 w 3 w 2 w 1 x 1 x 2 x 3 x 4 x 15
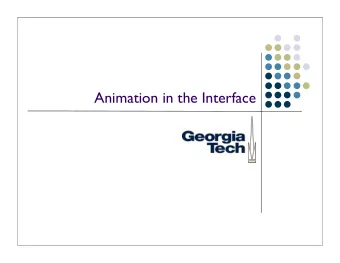
Sticky particles Cumulative distribution Lagrangian representation Monotone rearrangement The monotone rearrangement ρ m 2 − 1 X ρ = M ρ m 3 m 1 m 4 x x 1 x 2 x 3 x 4 x 4 x 3 The distribution function M ρ Mass = 1 x 2 w 3 w 1 w 2 w 3 1 w 2 x 1 w 1 = m 1 w 1 w 2 = m 1 + m 2 w 3 = m 1 + m 2 + m 3 x 1 x 2 x 3 x 4 x 15
Sticky particles Cumulative distribution Lagrangian representation Optimal transport and monotone rearrangement Point of view of 1 -dimensional optimal transport: instead of using � � the cumulative distribution function M ̺ ( x ) = ̺ ( −∞ , x ] , we represent each probability measure ̺ by its monotone rearrangement X ̺ : (0 , 1) → R : X ̺ ( w ) is the position x such that ̺ (( −∞ , x ]) = w . � � X ̺ ( w ) := inf x ∈ R : M ̺ ( x ) > w w ∈ (0 , 1) which is the so-called pseudo-inverse of M ̺ . The map X ̺ is nondecreasing and right-continuous . It pushes the Lebesgue measure λ := L 1 | (0 , 1) on (0 , 1) onto ̺ , i.e. ( X ̺ ) # L 1 L 1 ( X − 1 | (0 , 1) = ̺, ̺ ( B )) = ̺ ( B ) for every Borel set B ⊂ R It satisfies the change of variable formula � 1 � φ ( x ) d ̺ ( x ) = φ ( X ̺ ( w )) d w 0 R for every nonnegative/bounded Borel function φ : R → R . In particular, � 1 � | x | 2 d ̺ ( x ) = � 2 d w = � 2 � � � � m 2 ( ̺ ) := � X ̺ ( w ) � X ̺ L 2 (0 , 1) 0 R 16
Sticky particles Cumulative distribution Lagrangian representation Optimal transport and monotone rearrangement Point of view of 1 -dimensional optimal transport: instead of using � � the cumulative distribution function M ̺ ( x ) = ̺ ( −∞ , x ] , we represent each probability measure ̺ by its monotone rearrangement X ̺ : (0 , 1) → R : X ̺ ( w ) is the position x such that ̺ (( −∞ , x ]) = w . � � X ̺ ( w ) := inf x ∈ R : M ̺ ( x ) > w w ∈ (0 , 1) which is the so-called pseudo-inverse of M ̺ . The map X ̺ is nondecreasing and right-continuous . It pushes the Lebesgue measure λ := L 1 | (0 , 1) on (0 , 1) onto ̺ , i.e. ( X ̺ ) # L 1 L 1 ( X − 1 | (0 , 1) = ̺, ̺ ( B )) = ̺ ( B ) for every Borel set B ⊂ R It satisfies the change of variable formula � 1 � φ ( x ) d ̺ ( x ) = φ ( X ̺ ( w )) d w 0 R for every nonnegative/bounded Borel function φ : R → R . In particular, � 1 � | x | 2 d ̺ ( x ) = � 2 d w = � 2 � � � � m 2 ( ̺ ) := � X ̺ ( w ) � X ̺ L 2 (0 , 1) 0 R 16
Sticky particles Cumulative distribution Lagrangian representation Optimal transport and monotone rearrangement Point of view of 1 -dimensional optimal transport: instead of using � � the cumulative distribution function M ̺ ( x ) = ̺ ( −∞ , x ] , we represent each probability measure ̺ by its monotone rearrangement X ̺ : (0 , 1) → R : X ̺ ( w ) is the position x such that ̺ (( −∞ , x ]) = w . � � X ̺ ( w ) := inf x ∈ R : M ̺ ( x ) > w w ∈ (0 , 1) which is the so-called pseudo-inverse of M ̺ . The map X ̺ is nondecreasing and right-continuous . It pushes the Lebesgue measure λ := L 1 | (0 , 1) on (0 , 1) onto ̺ , i.e. ( X ̺ ) # L 1 L 1 ( X − 1 | (0 , 1) = ̺, ̺ ( B )) = ̺ ( B ) for every Borel set B ⊂ R It satisfies the change of variable formula � 1 � φ ( x ) d ̺ ( x ) = φ ( X ̺ ( w )) d w 0 R for every nonnegative/bounded Borel function φ : R → R . In particular, � 1 � | x | 2 d ̺ ( x ) = � 2 d w = � 2 � � � � m 2 ( ̺ ) := � X ̺ ( w ) � X ̺ L 2 (0 , 1) 0 R 16
Sticky particles Cumulative distribution Lagrangian representation Optimal transport and monotone rearrangement Point of view of 1 -dimensional optimal transport: instead of using � � the cumulative distribution function M ̺ ( x ) = ̺ ( −∞ , x ] , we represent each probability measure ̺ by its monotone rearrangement X ̺ : (0 , 1) → R : X ̺ ( w ) is the position x such that ̺ (( −∞ , x ]) = w . � � X ̺ ( w ) := inf x ∈ R : M ̺ ( x ) > w w ∈ (0 , 1) which is the so-called pseudo-inverse of M ̺ . The map X ̺ is nondecreasing and right-continuous . It pushes the Lebesgue measure λ := L 1 | (0 , 1) on (0 , 1) onto ̺ , i.e. ( X ̺ ) # L 1 L 1 ( X − 1 | (0 , 1) = ̺, ̺ ( B )) = ̺ ( B ) for every Borel set B ⊂ R It satisfies the change of variable formula � 1 � φ ( x ) d ̺ ( x ) = φ ( X ̺ ( w )) d w 0 R for every nonnegative/bounded Borel function φ : R → R . In particular, � 1 � | x | 2 d ̺ ( x ) = � 2 d w = � 2 � � � � m 2 ( ̺ ) := � X ̺ ( w ) � X ̺ L 2 (0 , 1) 0 R 16
Sticky particles Cumulative distribution Lagrangian representation Optimal transport and monotone rearrangement Point of view of 1 -dimensional optimal transport: instead of using � � the cumulative distribution function M ̺ ( x ) = ̺ ( −∞ , x ] , we represent each probability measure ̺ by its monotone rearrangement X ̺ : (0 , 1) → R : X ̺ ( w ) is the position x such that ̺ (( −∞ , x ]) = w . � � X ̺ ( w ) := inf x ∈ R : M ̺ ( x ) > w w ∈ (0 , 1) which is the so-called pseudo-inverse of M ̺ . The map X ̺ is nondecreasing and right-continuous . It pushes the Lebesgue measure λ := L 1 | (0 , 1) on (0 , 1) onto ̺ , i.e. ( X ̺ ) # L 1 L 1 ( X − 1 | (0 , 1) = ̺, ̺ ( B )) = ̺ ( B ) for every Borel set B ⊂ R It satisfies the change of variable formula � 1 � φ ( x ) d ̺ ( x ) = φ ( X ̺ ( w )) d w 0 R for every nonnegative/bounded Borel function φ : R → R . In particular, � 1 � | x | 2 d ̺ ( x ) = � 2 d w = � 2 � � � � m 2 ( ̺ ) := � X ̺ ( w ) � X ̺ L 2 (0 , 1) 0 R 16
Sticky particles Cumulative distribution Lagrangian representation Wasserstein distance and the L 2 isometry The map ̺ �→ X ̺ is a one-to-one correspondence between the space P 2 ( R ) of probability measures with finite quadratic moment R | x | 2 d ̺ ( x ) < + ∞ � m 2 ( ̺ ) = and the closed convex cone K of all the nondecreasing function in L 2 (0 , 1) (among which we can always choose the right-continuous representative). L 2 -Wasserstein distance W 2 ( ̺ 1 , ̺ 2 ) between ̺ 1 , ̺ 2 ∈ P 2 ( R ): � 1 � 2 d w = � 2 W 2 2 ( ̺ 1 , ̺ 2 ) := � � � � � X ̺ 1 ( w ) − X ̺ 2 ( w ) � X ̺ 1 − X ̺ 2 L 2 (0 , 1) 0 In this way ̺ ↔ X ̺ is an isometry between ( P 2 ( R ) , W 2 ) and ( K , � · � L 2 (0 , 1) ). 17
Sticky particles Cumulative distribution Lagrangian representation Wasserstein distance and the L 2 isometry The map ̺ �→ X ̺ is a one-to-one correspondence between the space P 2 ( R ) of probability measures with finite quadratic moment R | x | 2 d ̺ ( x ) < + ∞ � m 2 ( ̺ ) = and the closed convex cone K of all the nondecreasing function in L 2 (0 , 1) (among which we can always choose the right-continuous representative). L 2 -Wasserstein distance W 2 ( ̺ 1 , ̺ 2 ) between ̺ 1 , ̺ 2 ∈ P 2 ( R ): � 1 � 2 d w = � 2 W 2 2 ( ̺ 1 , ̺ 2 ) := � � � � � X ̺ 1 ( w ) − X ̺ 2 ( w ) � X ̺ 1 − X ̺ 2 L 2 (0 , 1) 0 In this way ̺ ↔ X ̺ is an isometry between ( P 2 ( R ) , W 2 ) and ( K , � · � L 2 (0 , 1) ). 17
Sticky particles Cumulative distribution Lagrangian representation Wasserstein distance and the L 2 isometry The map ̺ �→ X ̺ is a one-to-one correspondence between the space P 2 ( R ) of probability measures with finite quadratic moment R | x | 2 d ̺ ( x ) < + ∞ � m 2 ( ̺ ) = and the closed convex cone K of all the nondecreasing function in L 2 (0 , 1) (among which we can always choose the right-continuous representative). L 2 -Wasserstein distance W 2 ( ̺ 1 , ̺ 2 ) between ̺ 1 , ̺ 2 ∈ P 2 ( R ): � 1 � 2 d w = � 2 W 2 2 ( ̺ 1 , ̺ 2 ) := � � � � � X ̺ 1 ( w ) − X ̺ 2 ( w ) � X ̺ 1 − X ̺ 2 L 2 (0 , 1) 0 In this way ̺ ↔ X ̺ is an isometry between ( P 2 ( R ) , W 2 ) and ( K , � · � L 2 (0 , 1) ). 17
Sticky particles Cumulative distribution Lagrangian representation Wasserstein distance and the L 2 isometry The map ̺ �→ X ̺ is a one-to-one correspondence between the space P 2 ( R ) of probability measures with finite quadratic moment R | x | 2 d ̺ ( x ) < + ∞ � m 2 ( ̺ ) = and the closed convex cone K of all the nondecreasing function in L 2 (0 , 1) (among which we can always choose the right-continuous representative). L 2 -Wasserstein distance W 2 ( ̺ 1 , ̺ 2 ) between ̺ 1 , ̺ 2 ∈ P 2 ( R ): � 1 � 2 d w = � 2 W 2 2 ( ̺ 1 , ̺ 2 ) := � � � � � X ̺ 1 ( w ) − X ̺ 2 ( w ) � X ̺ 1 − X ̺ 2 L 2 (0 , 1) 0 In this way ̺ ↔ X ̺ is an isometry between ( P 2 ( R ) , W 2 ) and ( K , � · � L 2 (0 , 1) ). 17
Sticky particles Cumulative distribution Lagrangian representation Lagrangian parametrizations To the (discrete) data µ t = ( ̺ t , ̺ t v t ) we associate the functions ( X t , V t ) ∈ K × L 2 (0 , 1) by X t := X ̺ t , V t := v t ◦ X t . Notice that the second component of ( X t , V t ) do not span the whole space L 2 ( R ) in general, but it is contained in the closed subspace � � V = v ◦ X t for some Borel map v ∈ L 2 H X t := ̺ t ( R ). The reduced cone of the discrete particle system with masses m = ( m 1 , m 2 , · · · , m N ) K m := � X ∈ K : X | [ w i − 1 ,w i ) ≡ x i � is constant 18
Sticky particles Cumulative distribution Lagrangian representation Lagrangian parametrizations To the (discrete) data µ t = ( ̺ t , ̺ t v t ) we associate the functions ( X t , V t ) ∈ K × L 2 (0 , 1) by X t := X ̺ t , V t := v t ◦ X t . Notice that the second component of ( X t , V t ) do not span the whole space L 2 ( R ) in general, but it is contained in the closed subspace � � V = v ◦ X t for some Borel map v ∈ L 2 H X t := ̺ t ( R ). The reduced cone of the discrete particle system with masses m = ( m 1 , m 2 , · · · , m N ) K m := � X ∈ K : X | [ w i − 1 ,w i ) ≡ x i � is constant 18
Sticky particles Cumulative distribution Lagrangian representation Lagrangian parametrizations To the (discrete) data µ t = ( ̺ t , ̺ t v t ) we associate the functions ( X t , V t ) ∈ K × L 2 (0 , 1) by X t := X ̺ t , V t := v t ◦ X t . Notice that the second component of ( X t , V t ) do not span the whole space L 2 ( R ) in general, but it is contained in the closed subspace � � V = v ◦ X t for some Borel map v ∈ L 2 H X t := ̺ t ( R ). The monotone rearrangement − 1 X ρ = M ρ The reduced cone of the discrete particle system with masses m = ( m 1 , m 2 , · · · , m N ) x 4 x 3 K m := � X ∈ K : X | [ w i − 1 ,w i ) ≡ x i � x 2 is constant w 1 w 2 w 3 1 x 1 w 1 = m 1 , w 2 = m 1 + m 2 , · · · 18
Sticky particles Cumulative distribution Lagrangian representation The normal cone N X K Ξ ∈ N X K if and only if X ∈ K and one of the following equivalent conditions holds (Ξ | Z − X ) ≤ 0 for every Z ∈ K , K is the L 2 projection on K P K ( X + Ξ) = X, P The normal cone N X K coincides with the subdifferential ∂I K ( X ) of the indi- � 0 if X ∈ K , cator (convex, lower semicontinuous) I K ( X ) = + ∞ otherwise function of K in L 2 (0 , 1) 19
Sticky particles Cumulative distribution Lagrangian representation The normal cone N X K Ξ ∈ N X K if and only if X ∈ K and one of the following equivalent conditions holds (Ξ | Z − X ) ≤ 0 for every Z ∈ K , K is the L 2 projection on K P K ( X + Ξ) = X, P The normal cone N X K coincides with the subdifferential ∂I K ( X ) of the indi- � 0 if X ∈ K , cator (convex, lower semicontinuous) I K ( X ) = + ∞ otherwise function of K in L 2 (0 , 1) 19
Sticky particles Cumulative distribution Lagrangian representation The normal cone N X K Ξ ∈ N X K if and only if X ∈ K and one of the following equivalent conditions holds (Ξ | Z − X ) ≤ 0 for every Z ∈ K , K is the L 2 projection on K P K ( X + Ξ) = X, P The normal cone N X K coincides with the subdifferential ∂I K ( X ) of the indi- � 0 if X ∈ K , cator (convex, lower semicontinuous) I K ( X ) = + ∞ otherwise function of K in L 2 (0 , 1) 19
Sticky particles Cumulative distribution Lagrangian representation The normal cone N X K Ξ ∈ N X K if and only if X ∈ K and one of the following equivalent conditions holds (Ξ | Z − X ) ≤ 0 for every Z ∈ K , K is the L 2 projection on K P K ( X + Ξ) = X, P The normal cone N X K coincides with the subdifferential ∂I K ( X ) of the indi- � 0 if X ∈ K , cator (convex, lower semicontinuous) I K ( X ) = + ∞ otherwise function of K in L 2 (0 , 1) N x 2 K T x 1 K T x 2 K N x 1 K K x 1 x 2 Figure: Normal and tangent cones. 19
Sticky particles Cumulative distribution Lagrangian representation Second order differential equations and jump conditions Force field: f [ ̺ ] � F [ X ̺ ]( w ) such that � 1 � for every test function ζ ∈ C 0 ζ ( x ) d f [ ̺ ] = ζ ( X ̺ ) F d w b ( R ). R 0 Differential equation for the collision free motion in Lagrangian coordinates: d 2 X ′ d t 2 X t = F [ X t ] , X 0 = X ̺ 0 , 0 = V 0 = v 0 ◦ X 0 . 20
Sticky particles Cumulative distribution Lagrangian representation Second order differential equations and jump conditions Force field: f [ ̺ ] � F [ X ̺ ]( w ) such that � 1 � for every test function ζ ∈ C 0 ζ ( x ) d f [ ̺ ] = ζ ( X ̺ ) F d w b ( R ). R 0 Differential equation for the collision free motion in Lagrangian coordinates: d 2 X ′ d t 2 X t = F [ X t ] , X 0 = X ̺ 0 , 0 = V 0 = v 0 ◦ X 0 . 20
Sticky particles Cumulative distribution Lagrangian representation Second order differential equations and jump conditions Force field: f [ ̺ ] � F [ X ̺ ]( w ) such that � 1 � for every test function ζ ∈ C 0 ζ ( x ) d f [ ̺ ] = ζ ( X ̺ ) F d w b ( R ). R 0 Differential equation for the collision free motion in Lagrangian coordinates: d 2 X ′ d t 2 X t = F [ X t ] , X 0 = X ̺ 0 , 0 = V 0 = v 0 ◦ X 0 . After a collision at a time ¯ t : V ¯ t + = P t ) K ( V ¯ t − ) i.e. V ¯ t + + N X (¯ t ) K ∋ V ¯ T X (¯ t − particle velocity after collision K particle trajectory Figure: Projection of velocities onto the tangent cone. 20
Sticky particles Cumulative distribution Lagrangian representation Second order differential inclusions: the role of the sticky condition “Formal” differential inclusion for the SPS: d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] ( ⋆ ) The discrete case still satisfies ( ⋆ ) if F satisfies the “ non splitting ” condition F [ X ] ∈ H X i.e. F [ X ] depends on X or, more generally, F [ X ] − P H X F [ X ] ∈ N X K as for the Euler-Poisson system in attractive regime. The theory of second order differential inclusion ( Schatzman ’78, Moreau ’83 ) only covers the finite-dimensional case, lacks uniqueness, and stability. Sticky condition: ⇒ X t ∈ H X s i.e. X t “depends on” X s . s < t By the monotonicity property of ∂ I K we have s < t ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) 21
Sticky particles Cumulative distribution Lagrangian representation Second order differential inclusions: the role of the sticky condition “Formal” differential inclusion for the SPS: d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] ( ⋆ ) The discrete case still satisfies ( ⋆ ) if F satisfies the “ non splitting ” condition F [ X ] ∈ H X i.e. F [ X ] depends on X or, more generally, F [ X ] − P H X F [ X ] ∈ N X K as for the Euler-Poisson system in attractive regime. The theory of second order differential inclusion ( Schatzman ’78, Moreau ’83 ) only covers the finite-dimensional case, lacks uniqueness, and stability. Sticky condition: ⇒ X t ∈ H X s i.e. X t “depends on” X s . s < t By the monotonicity property of ∂ I K we have s < t ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) 21
Sticky particles Cumulative distribution Lagrangian representation Second order differential inclusions: the role of the sticky condition “Formal” differential inclusion for the SPS: d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] ( ⋆ ) The discrete case still satisfies ( ⋆ ) if F satisfies the “ non splitting ” condition F [ X ] ∈ H X i.e. F [ X ] depends on X or, more generally, F [ X ] − P H X F [ X ] ∈ N X K as for the Euler-Poisson system in attractive regime. The theory of second order differential inclusion ( Schatzman ’78, Moreau ’83 ) only covers the finite-dimensional case, lacks uniqueness, and stability. Sticky condition: ⇒ X t ∈ H X s i.e. X t “depends on” X s . s < t By the monotonicity property of ∂ I K we have s < t ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) 21
Sticky particles Cumulative distribution Lagrangian representation Second order differential inclusions: the role of the sticky condition “Formal” differential inclusion for the SPS: d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] ( ⋆ ) The discrete case still satisfies ( ⋆ ) if F satisfies the “ non splitting ” condition F [ X ] ∈ H X i.e. F [ X ] depends on X or, more generally, F [ X ] − P H X F [ X ] ∈ N X K as for the Euler-Poisson system in attractive regime. The theory of second order differential inclusion ( Schatzman ’78, Moreau ’83 ) only covers the finite-dimensional case, lacks uniqueness, and stability. Sticky condition: ⇒ X t ∈ H X s i.e. X t “depends on” X s . s < t By the monotonicity property of ∂ I K we have s < t ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) 21
Sticky particles Cumulative distribution Lagrangian representation Second order differential inclusions: the role of the sticky condition “Formal” differential inclusion for the SPS: d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] ( ⋆ ) The discrete case still satisfies ( ⋆ ) if F satisfies the “ non splitting ” condition F [ X ] ∈ H X i.e. F [ X ] depends on X or, more generally, F [ X ] − P H X F [ X ] ∈ N X K as for the Euler-Poisson system in attractive regime. The theory of second order differential inclusion ( Schatzman ’78, Moreau ’83 ) only covers the finite-dimensional case, lacks uniqueness, and stability. Sticky condition: ⇒ X t ∈ H X s i.e. X t “depends on” X s . s < t By the monotonicity property of ∂ I K we have s < t ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) 21
Sticky particles Cumulative distribution Lagrangian representation Second order differential inclusions: the role of the sticky condition “Formal” differential inclusion for the SPS: d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] ( ⋆ ) The discrete case still satisfies ( ⋆ ) if F satisfies the “ non splitting ” condition F [ X ] ∈ H X i.e. F [ X ] depends on X or, more generally, F [ X ] − P H X F [ X ] ∈ N X K as for the Euler-Poisson system in attractive regime. The theory of second order differential inclusion ( Schatzman ’78, Moreau ’83 ) only covers the finite-dimensional case, lacks uniqueness, and stability. Sticky condition: ⇒ X t ∈ H X s i.e. X t “depends on” X s . s < t By the monotonicity property of ∂ I K we have s < t ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) 21
Sticky particles Cumulative distribution Lagrangian representation Reduction to first-order differential inclusions d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] , ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) ( ⋆ ) s < t We can then integrate ( ⋆ ) with respect to time from 0 to a final time t : since � t ∂ I K ( X s ) d s ∈ ∂ I K ( X t ) . 0 � t d d tX t − V 0 + ∂ I K ( X t ) ∋ F [ X s ] d s ( ⋆⋆ ) 0 Integrating again we get � t X t − ( X 0 + tV 0 ) + ∂ I K ( X t ) ∋ ( t − s ) F [ X s ] d s 0 i.e. � t � � X t = P X 0 + tV 0 + ( t − s ) F [ X s ] d s ( ⋆ ⋆ ⋆ ) K 0 22
Sticky particles Cumulative distribution Lagrangian representation Reduction to first-order differential inclusions d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] , ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) ( ⋆ ) s < t We can then integrate ( ⋆ ) with respect to time from 0 to a final time t : since � t ∂ I K ( X s ) d s ∈ ∂ I K ( X t ) . 0 � t d d tX t − V 0 + ∂ I K ( X t ) ∋ F [ X s ] d s ( ⋆⋆ ) 0 Integrating again we get � t X t − ( X 0 + tV 0 ) + ∂ I K ( X t ) ∋ ( t − s ) F [ X s ] d s 0 i.e. � t � � X t = P X 0 + tV 0 + ( t − s ) F [ X s ] d s ( ⋆ ⋆ ⋆ ) K 0 22
Sticky particles Cumulative distribution Lagrangian representation Reduction to first-order differential inclusions d 2 d t 2 X t + ∂ I K ( X t ) ∋ F [ X t ] , ⇒ ∂ I K ( X s ) ⊂ ∂ I K ( X t ) ( ⋆ ) s < t We can then integrate ( ⋆ ) with respect to time from 0 to a final time t : since � t ∂ I K ( X s ) d s ∈ ∂ I K ( X t ) . 0 � t d d tX t − V 0 + ∂ I K ( X t ) ∋ F [ X s ] d s ( ⋆⋆ ) 0 Integrating again we get � t X t − ( X 0 + tV 0 ) + ∂ I K ( X t ) ∋ ( t − s ) F [ X s ] d s 0 i.e. � t � � X t = P X 0 + tV 0 + ( t − s ) F [ X s ] d s ( ⋆ ⋆ ⋆ ) K 0 22
Sticky particles Cumulative distribution Lagrangian representation A description of the evolution by a differential inclusion Recall that to the (discrete) data µ t = ( ̺ t , ̺ t v t ) we associate the functions ( X t , V t ) ∈ K × L 2 (0 , 1) by X t := X ̺ t , V t := v t ◦ X t . Theorem (Lagrangian representation) A family µ t = ( ̺ t , ̺ t v t ) is a solution of the (discrete) SPS if and only if X is the unique strong solution of the differential inclusion � t d d tX t + ∂ I K ( X t ) ∋ V 0 + F [ X s ] d s, lim t ↓ 0 X t = X 0 . 0 � t Equivalently, setting Y t := V 0 + 0 F [ X s ] d s we get the well posed system d d tX t + ∂ I K ( X t ) ∋ Y t d d tY t = F [ X t ] 23
Sticky particles Cumulative distribution Lagrangian representation A description of the evolution by a differential inclusion Recall that to the (discrete) data µ t = ( ̺ t , ̺ t v t ) we associate the functions ( X t , V t ) ∈ K × L 2 (0 , 1) by X t := X ̺ t , V t := v t ◦ X t . Theorem (Lagrangian representation) A family µ t = ( ̺ t , ̺ t v t ) is a solution of the (discrete) SPS if and only if X is the unique strong solution of the differential inclusion � t d d tX t + ∂ I K ( X t ) ∋ V 0 + F [ X s ] d s, lim t ↓ 0 X t = X 0 . 0 � t Equivalently, setting Y t := V 0 + 0 F [ X s ] d s we get the well posed system d d tX t + ∂ I K ( X t ) ∋ Y t d d tY t = F [ X t ] 23
Sticky particles Cumulative distribution Lagrangian representation A description of the evolution by a differential inclusion Recall that to the (discrete) data µ t = ( ̺ t , ̺ t v t ) we associate the functions ( X t , V t ) ∈ K × L 2 (0 , 1) by X t := X ̺ t , V t := v t ◦ X t . Theorem (Lagrangian representation) A family µ t = ( ̺ t , ̺ t v t ) is a solution of the (discrete) SPS if and only if X is the unique strong solution of the differential inclusion � t d d tX t + ∂ I K ( X t ) ∋ V 0 + F [ X s ] d s, lim t ↓ 0 X t = X 0 . 0 � t Equivalently, setting Y t := V 0 + 0 F [ X s ] d s we get the well posed system d d tX t + ∂ I K ( X t ) ∋ Y t d d tY t = F [ X t ] 23
Sticky particles Cumulative distribution Lagrangian representation Stability properties Suppose that F is Lipschitz in L 2 (0 , 1). By general results on solution of differential inclusion of the type Z ′ t + ∂φ ( Z t ) ∋ G t , φ convex Theorem If X 1 t , X 2 t are the Lagrangian representation of two (discrete) solutions ̺ 1 t , ̺ 2 t of the SPS we have � � � X 1 t − X 2 � X 1 0 − X 2 0 � L 2 + � V 1 0 − V 2 sup t � L 2 ≤ C T 0 � L 2 . t ∈ [0 ,T ] X is right-differentiable in each point and the velocity field v t can be recovered by the formula V t = d + d t X t = v t ◦ X t ∈ H X t . One gets [S. ’96] the following integral estimate for the velocity component: � T � � �� � � V 1 r − V 2 r � 2 � X ℓ 0 � + � V ℓ � X 1 0 − X 2 0 � + � V 1 0 − V 2 L 2 d r ≤ C T 0 � 0 � . 0 ℓ 24
Sticky particles Cumulative distribution Lagrangian representation Stability properties Suppose that F is Lipschitz in L 2 (0 , 1). By general results on solution of differential inclusion of the type Z ′ t + ∂φ ( Z t ) ∋ G t , φ convex Theorem If X 1 t , X 2 t are the Lagrangian representation of two (discrete) solutions ̺ 1 t , ̺ 2 t of the SPS we have � � � X 1 t − X 2 � X 1 0 − X 2 0 � L 2 + � V 1 0 − V 2 sup t � L 2 ≤ C T 0 � L 2 . t ∈ [0 ,T ] X is right-differentiable in each point and the velocity field v t can be recovered by the formula V t = d + d t X t = v t ◦ X t ∈ H X t . One gets [S. ’96] the following integral estimate for the velocity component: � T � � �� � � V 1 r − V 2 r � 2 � X ℓ 0 � + � V ℓ � X 1 0 − X 2 0 � + � V 1 0 − V 2 L 2 d r ≤ C T 0 � 0 � . 0 ℓ 24
Sticky particles Cumulative distribution Lagrangian representation Stability properties Suppose that F is Lipschitz in L 2 (0 , 1). By general results on solution of differential inclusion of the type Z ′ t + ∂φ ( Z t ) ∋ G t , φ convex Theorem If X 1 t , X 2 t are the Lagrangian representation of two (discrete) solutions ̺ 1 t , ̺ 2 t of the SPS we have � � � X 1 t − X 2 � X 1 0 − X 2 0 � L 2 + � V 1 0 − V 2 sup t � L 2 ≤ C T 0 � L 2 . t ∈ [0 ,T ] X is right-differentiable in each point and the velocity field v t can be recovered by the formula V t = d + d t X t = v t ◦ X t ∈ H X t . One gets [S. ’96] the following integral estimate for the velocity component: � T � � �� � � V 1 r − V 2 r � 2 � X ℓ 0 � + � V ℓ � X 1 0 − X 2 0 � + � V 1 0 − V 2 L 2 d r ≤ C T 0 � 0 � . 0 ℓ 24
Sticky particles Cumulative distribution Lagrangian representation Convergence of discrete solutions Theorem Let µ n := ( ̺ n , ̺ n v n ) be a sequence of discrete sticky-particle solutions with ̺ n 0 ⇀ ̺ 0 in P 2 ( R ) and ̺ n 0 v n 0 ⇀ ̺ 0 v 0 weakly in the space of signed measures with � � 0 | 2 d ρ n | v 0 | 2 d ̺ 0 | v n 0 → Then ̺ n t ⇀ ̺ t in P 2 ( R ) for every t ≥ 0 and ̺ n t v n t ⇀ ̺ t v t weakly in the space of signed measures with � � t | 2 d ρ n | v t | 2 d ̺ t | v n t → and ( ρ t , ρ t v t ) is a solution of � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 25
Sticky particles Cumulative distribution Lagrangian representation Convergence of discrete solutions Theorem Let µ n := ( ̺ n , ̺ n v n ) be a sequence of discrete sticky-particle solutions with ̺ n 0 ⇀ ̺ 0 in P 2 ( R ) and ̺ n 0 v n 0 ⇀ ̺ 0 v 0 weakly in the space of signed measures with � � 0 | 2 d ρ n | v 0 | 2 d ̺ 0 | v n 0 → Then ̺ n t ⇀ ̺ t in P 2 ( R ) for every t ≥ 0 and ̺ n t v n t ⇀ ̺ t v t weakly in the space of signed measures with � � t | 2 d ρ n | v t | 2 d ̺ t | v n t → and ( ρ t , ρ t v t ) is a solution of � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 25
Sticky particles Cumulative distribution Lagrangian representation Convergence of discrete solutions Theorem Let µ n := ( ̺ n , ̺ n v n ) be a sequence of discrete sticky-particle solutions with ̺ n 0 ⇀ ̺ 0 in P 2 ( R ) and ̺ n 0 v n 0 ⇀ ̺ 0 v 0 weakly in the space of signed measures with � � 0 | 2 d ρ n | v 0 | 2 d ̺ 0 | v n 0 → Then ̺ n t ⇀ ̺ t in P 2 ( R ) for every t ≥ 0 and ̺ n t v n t ⇀ ̺ t v t weakly in the space of signed measures with � � t | 2 d ρ n | v t | 2 d ̺ t | v n t → and ( ρ t , ρ t v t ) is a solution of � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 25
Sticky particles Cumulative distribution Lagrangian representation Convergence of discrete solutions Theorem Let µ n := ( ̺ n , ̺ n v n ) be a sequence of discrete sticky-particle solutions with ̺ n 0 ⇀ ̺ 0 in P 2 ( R ) and ̺ n 0 v n 0 ⇀ ̺ 0 v 0 weakly in the space of signed measures with � � 0 | 2 d ρ n | v 0 | 2 d ̺ 0 | v n 0 → Then ̺ n t ⇀ ̺ t in P 2 ( R ) for every t ≥ 0 and ̺ n t v n t ⇀ ̺ t v t weakly in the space of signed measures with � � t | 2 d ρ n | v t | 2 d ̺ t | v n t → and ( ρ t , ρ t v t ) is a solution of � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 25
Sticky particles Cumulative distribution Lagrangian representation Convergence of discrete solutions Theorem Let µ n := ( ̺ n , ̺ n v n ) be a sequence of discrete sticky-particle solutions with ̺ n 0 ⇀ ̺ 0 in P 2 ( R ) and ̺ n 0 v n 0 ⇀ ̺ 0 v 0 weakly in the space of signed measures with � � 0 | 2 d ρ n | v 0 | 2 d ̺ 0 | v n 0 → Then ̺ n t ⇀ ̺ t in P 2 ( R ) for every t ≥ 0 and ̺ n t v n t ⇀ ̺ t v t weakly in the space of signed measures with � � t | 2 d ρ n | v t | 2 d ̺ t | v n t → and ( ρ t , ρ t v t ) is a solution of � ∂ t ̺ + ∂ x ( ̺ v ) = 0 , ̺ | t =0 = ̺ 0 , v | t =0 = v 0 , ∂ t ( ̺ v ) + ∂ x ( ̺ v 2 ) = f [ ̺ ] , 25
Sticky particles Cumulative distribution Lagrangian representation An explicit representation formula for the Euler-Poisson system [ Tadmor-Wei] − ∂ 2 f [ ̺ ] = − ̺ ∂ x q ̺ with q ̺ solution of xx q ̺ = ̺ F [ X ] = 1 − 2 w � X 0 + tV 0 + (1 − 2 w ) t 2 � X t = P . K 26
Sticky particles Cumulative distribution Lagrangian representation Extensions and open problems Extensions: ◮ Uniformly continuous force fields ◮ The behaviour of the Euler-Poisson system in the repulsive regime: W ( x ) = −| x | . Open problems: ◮ Adding a pressure term. 27
Sticky particles Cumulative distribution Lagrangian representation Extensions and open problems Extensions: ◮ Uniformly continuous force fields ◮ The behaviour of the Euler-Poisson system in the repulsive regime: W ( x ) = −| x | . Open problems: ◮ Adding a pressure term. 27
Sticky particles Cumulative distribution Lagrangian representation Extensions and open problems Extensions: ◮ Uniformly continuous force fields ◮ The behaviour of the Euler-Poisson system in the repulsive regime: W ( x ) = −| x | . Open problems: ◮ Adding a pressure term. 27
Sticky particles Cumulative distribution Lagrangian representation Extensions and open problems Extensions: ◮ Uniformly continuous force fields ◮ The behaviour of the Euler-Poisson system in the repulsive regime: W ( x ) = −| x | . Open problems: ◮ Adding a pressure term. 27
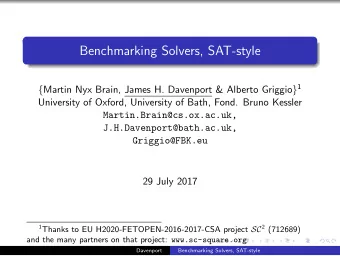
Sticky particles Cumulative distribution Lagrangian representation The L 2 -projection on K Theorem � w If X ∈ L 2 (0 , 1) and X ( w ) = 0 X ( s ) d s is its primitive then d where X ∗∗ is the convex envelope of X . d w X ∗∗ P K ( X ) = 28
Sticky particles Cumulative distribution Lagrangian representation The L 2 -projection on K Theorem � w If X ∈ L 2 (0 , 1) and X ( w ) = 0 X ( s ) d s is its primitive then d where X ∗∗ is the convex envelope of X . d w X ∗∗ P K ( X ) = X 1 28
Sticky particles Cumulative distribution Lagrangian representation The L 2 -projection on K Theorem � w If X ∈ L 2 (0 , 1) and X ( w ) = 0 X ( s ) d s is its primitive then d where X ∗∗ is the convex envelope of X . d w X ∗∗ P K ( X ) = � w X X ( w ) = 0 X ( s ) ds 1 1 28
Sticky particles Cumulative distribution Lagrangian representation The L 2 -projection on K Theorem � w If X ∈ L 2 (0 , 1) and X ( w ) = 0 X ( s ) d s is its primitive then d where X ∗∗ is the convex envelope of X . d w X ∗∗ P K ( X ) = � w X X ( w ) = 0 X ( s ) ds 1 1 X ∗∗ 1 28
Sticky particles Cumulative distribution Lagrangian representation The L 2 -projection on K Theorem � w If X ∈ L 2 (0 , 1) and X ( w ) = 0 X ( s ) d s is its primitive then d where X ∗∗ is the convex envelope of X . d w X ∗∗ P K ( X ) = � w X X ( w ) = 0 X ( s ) ds 1 1 X ∗∗ P K ( X ) 1 1 28
Sticky particles Cumulative distribution Lagrangian representation The subdifferential of I K If X ∈ K we consider the open set Ω X where X is (essentially) constant: � � Ω X := w ∈ (0 , 1) : X is essentially constant in a neighborhood of w , and the cone Y ∈ C 0 ([0 , 1]) : Y ≥ 0 , � � N X := Y = 0 in [0 , 1] \ Ω X . Theorem � w Let X ∈ K and Y ∈ L 2 (0 , 1) with Y ( w ) := 0 Y ( s ) d s . Then Y ∈ ∂ I K ( X ) ⇔ Y ∈ N X . Notice that if Z = f ( X ) ∈ H X depends on X then Ω X ⊂ Ω Z , N X ⊂ N Z Corollary (Monotonicity property of ∂ I K ) If Z = f ( X ) ∈ H X depends on X then ∂ I K ( X ) ⊂ ∂ I K ( Z ) . 29
Sticky particles Cumulative distribution Lagrangian representation The subdifferential of I K If X ∈ K we consider the open set Ω X where X is (essentially) constant: � � Ω X := w ∈ (0 , 1) : X is essentially constant in a neighborhood of w , and the cone Y ∈ C 0 ([0 , 1]) : Y ≥ 0 , � � N X := Y = 0 in [0 , 1] \ Ω X . Theorem � w Let X ∈ K and Y ∈ L 2 (0 , 1) with Y ( w ) := 0 Y ( s ) d s . Then Y ∈ ∂ I K ( X ) ⇔ Y ∈ N X . Notice that if Z = f ( X ) ∈ H X depends on X then Ω X ⊂ Ω Z , N X ⊂ N Z Corollary (Monotonicity property of ∂ I K ) If Z = f ( X ) ∈ H X depends on X then ∂ I K ( X ) ⊂ ∂ I K ( Z ) . 29
Sticky particles Cumulative distribution Lagrangian representation The subdifferential of I K If X ∈ K we consider the open set Ω X where X is (essentially) constant: � � Ω X := w ∈ (0 , 1) : X is essentially constant in a neighborhood of w , and the cone Y ∈ C 0 ([0 , 1]) : Y ≥ 0 , � � N X := Y = 0 in [0 , 1] \ Ω X . Theorem � w Let X ∈ K and Y ∈ L 2 (0 , 1) with Y ( w ) := 0 Y ( s ) d s . Then Y ∈ ∂ I K ( X ) ⇔ Y ∈ N X . Notice that if Z = f ( X ) ∈ H X depends on X then Ω X ⊂ Ω Z , N X ⊂ N Z Corollary (Monotonicity property of ∂ I K ) If Z = f ( X ) ∈ H X depends on X then ∂ I K ( X ) ⊂ ∂ I K ( Z ) . 29
Sticky particles Cumulative distribution Lagrangian representation The subdifferential of I K If X ∈ K we consider the open set Ω X where X is (essentially) constant: � � Ω X := w ∈ (0 , 1) : X is essentially constant in a neighborhood of w , and the cone Y ∈ C 0 ([0 , 1]) : Y ≥ 0 , � � N X := Y = 0 in [0 , 1] \ Ω X . Theorem � w Let X ∈ K and Y ∈ L 2 (0 , 1) with Y ( w ) := 0 Y ( s ) d s . Then Y ∈ ∂ I K ( X ) ⇔ Y ∈ N X . Notice that if Z = f ( X ) ∈ H X depends on X then Ω X ⊂ Ω Z , N X ⊂ N Z Corollary (Monotonicity property of ∂ I K ) If Z = f ( X ) ∈ H X depends on X then ∂ I K ( X ) ⊂ ∂ I K ( Z ) . 29
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.