State Space Representation Prof. Seungchul Lee Industrial AI Lab.
State of a Dynamic System • A minimum set of variables, known as state variables, that fully describe the system and its response to any given set of inputs. • The number of state variables, 𝑜 , is equal to the number of independent "energy storage elements" in the system. • The state equations 2
State Representation of LTI System • We restrict attention primarily to linear and time-invariant (LTI) system. Then it becomes a set of 𝑜 coupled first-order linear differential equations with constant coefficients. • Written compactly in a matrix form 3
Output of LTI System • Output equations 4
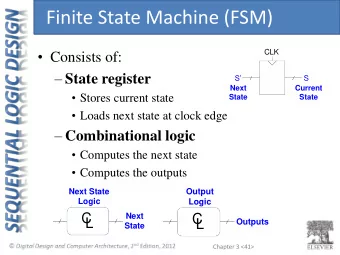
Block Diagram of LTI System • The complete system model for LTI system in the standard state space form • Block diagram 5
Homogeneous State Response 6
Homogeneous State Response • With zero input, 𝑣 𝑢 = 0 • Let's figure out how such a system behaves – Start by ignoring the input term: • What is the solution to this system? – If everything is scalar: – How do we know? 7
Homogeneous State Response • For higher-order systems, we just get a matrix version of this • The definition is just like for scalar exponentials • Derivative: • The matrix exponential plays such an important role that it has its own name: the state transition matrix, Φ(𝑢) 8
Properties of State Transition Matrix • Properties of state transition matrix 9
Example: State Transition Matrix • Example 10
Example: State Transition Matrix 11
Forced State Response of LTI System 12
Forced State Response of LTI System • But what if we have the controlled system: • Consider the complete response of a linear system to an input 𝑣(𝑢) • Derivation • Complete solution 13
For Higher Order Systems • Complete solution • The output • The first is a term similar to the system homogeneous response 𝑦 ℎ 𝑢 = 𝑓 𝐵𝑢 𝑦(0) that is dependent only on the system initial conditions 𝑦(0) • The second term is in the form of a convolution integral, and it is the particular solution for the input 𝑣(𝑢) with zero initial conditions 14
For Higher Order Systems • Note (Leibniz Integral Rule) 15
Note: Leibniz Integral Rule 16
Example 17
The Response of LTI to the Singularity Input Functions • Impulse response • The effect of impulse inputs on the state response is similar to changing a set of initial conditions 𝑦 0 → 𝑦 0 + 𝐶𝐿 18
The Response of LTI to the Singularity Input Functions • Step response 19
The Response of LTI to the Singularity Input Functions • Step response 20
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries