Spacetime finite element methods in biomedical applications Olaf - PowerPoint PPT Presentation
Spacetime finite element methods in biomedical applications Olaf Steinbach Institut f ur Angewandte Mathematik, TU Graz http://www.applied.math.tugraz.at SFB Mathematical Optimization and Applications in Biomedical Sciences LEAD Project
Space–time finite element methods in biomedical applications Olaf Steinbach Institut f¨ ur Angewandte Mathematik, TU Graz http://www.applied.math.tugraz.at SFB Mathematical Optimization and Applications in Biomedical Sciences LEAD Project Mechanics, Modeling and Simulation in Aortic Disscetion Subproject Parallel Space–Time Finite Element Methods O. Steinbach Magdeburg, 24.10.2018 1 / 23
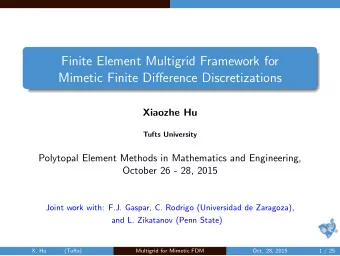
FETI Domain Decomposition Methods for the Simulation of Biological Tissues [C. Augustin 2014; C. Augustin, G. Holzapfel, OS 2014] O. Steinbach Magdeburg, 24.10.2018 2 / 23
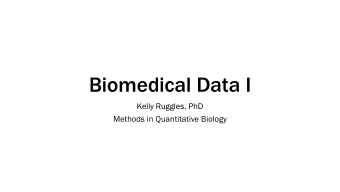
Cardiac Electromechanics [E. Karabelas 2015] Active stress T a O. Steinbach Magdeburg, 24.10.2018 3 / 23
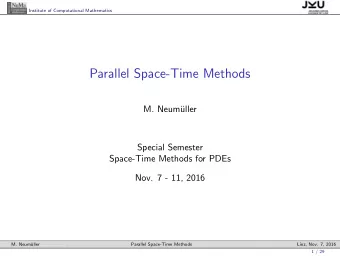
Optimal control of Blood Flow in an Artery with Aneurysm [L. John 2014] Wall shear stress distribution [L. John, P. Pustejovska, OS 2017] O. Steinbach Magdeburg, 24.10.2018 4 / 23
Lobe Pumpe [M. Neum¨ uller 2013] O. Steinbach Magdeburg, 24.10.2018 5 / 23
Space–Time Finite Element Methods ◮ Formulation in Bochner spaces ◮ Formulation in anisotropic Sobolev spaces ◮ standard lowest order (piecewise linear) finite elements ◮ Heat equation [with M. Zank] ◮ Bidomain system [with H. Yang] ◮ (Navier–) Stokes [with D. Pacheco] ◮ Wave equation [with M. Zank] The aim is to provide an adaptive simulation, simultaneously in space and time, which allows an accurate resolution of wave type solutions, and which allows, i.e. requires, the use of parallel solvers. O. Steinbach Magdeburg, 24.10.2018 6 / 23
Dirichlet boundary value problem for the heat equation α∂ t u ( x , t ) − ∆ x u ( x , t ) = f ( x , t ) for ( x , t ) ∈ Q := Ω × (0 , T ) , u ( x , t ) = 0 for ( x , t ) ∈ Σ := Γ × (0 , T ) , u ( x , 0) = 0 for x ∈ Ω . O. Steinbach Magdeburg, 24.10.2018 7 / 23
Dirichlet boundary value problem for the heat equation α∂ t u ( x , t ) − ∆ x u ( x , t ) = f ( x , t ) for ( x , t ) ∈ Q := Ω × (0 , T ) , u ( x , t ) = 0 for ( x , t ) ∈ Σ := Γ × (0 , T ) , u ( x , 0) = 0 for x ∈ Ω . Find u ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 0 , (0 , T ; H − 1 (Ω)) such that � T � T � � � � α∂ t u ( x , t ) v ( x , t )+ ∇ x u ( x , t ) ·∇ x v ( x , t ) dxdt = f ( x , t ) v ( x , t ) dxdt 0 Ω 0 Ω is satisfied for all v ∈ L 2 (0 , T ; H 1 0 (Ω)). O. Steinbach Magdeburg, 24.10.2018 7 / 23
Dirichlet boundary value problem for the heat equation α∂ t u ( x , t ) − ∆ x u ( x , t ) = f ( x , t ) for ( x , t ) ∈ Q := Ω × (0 , T ) , u ( x , t ) = 0 for ( x , t ) ∈ Σ := Γ × (0 , T ) , u ( x , 0) = 0 for x ∈ Ω . Find u ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 0 , (0 , T ; H − 1 (Ω)) such that � T � T � � � � α∂ t u ( x , t ) v ( x , t )+ ∇ x u ( x , t ) ·∇ x v ( x , t ) dxdt = f ( x , t ) v ( x , t ) dxdt 0 Ω 0 Ω is satisfied for all v ∈ L 2 (0 , T ; H 1 0 (Ω)). Bilinear form � T � � � a ( u , v ) = α∂ t u ( x , t ) v ( x , t ) + ∇ x u ( x , t ) · ∇ x v ( x , t ) dxdt 0 Ω � T � � � = α∂ t u ( x , t ) − ∆ x u ( x , t ) v ( x , t ) dxdt 0 Ω O. Steinbach Magdeburg, 24.10.2018 7 / 23
Quasi–static Dirichlet problem for u ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 0 , (0 , T ; H − 1 (Ω)) − ∆ x w ( x , t ) = α∂ t u ( x , t ) − ∆ x u ( x , t ) for ( x , t ) ∈ Q , w ( x , t ) = 0 for ( x , t ) ∈ Σ . O. Steinbach Magdeburg, 24.10.2018 8 / 23
Quasi–static Dirichlet problem for u ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 0 , (0 , T ; H − 1 (Ω)) − ∆ x w ( x , t ) = α∂ t u ( x , t ) − ∆ x u ( x , t ) for ( x , t ) ∈ Q , w ( x , t ) = 0 for ( x , t ) ∈ Σ . Find w ∈ L 2 (0 , T ; H 1 0 (Ω)) such that � T � T � � � � ∇ x w ( x , t ) ·∇ x v ( x , t ) dxdt = α∂ t u ( x , t ) − ∆ x u ( x , t ) v ( x , t ) dxdt 0 Ω 0 Ω is satisfied for all v ∈ L 2 (0 , T ; H 1 0 (Ω)). O. Steinbach Magdeburg, 24.10.2018 8 / 23
Quasi–static Dirichlet problem for u ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 0 , (0 , T ; H − 1 (Ω)) − ∆ x w ( x , t ) = α∂ t u ( x , t ) − ∆ x u ( x , t ) for ( x , t ) ∈ Q , w ( x , t ) = 0 for ( x , t ) ∈ Σ . Find w ∈ L 2 (0 , T ; H 1 0 (Ω)) such that � T � T � � � � ∇ x w ( x , t ) ·∇ x v ( x , t ) dxdt = α∂ t u ( x , t ) − ∆ x u ( x , t ) v ( x , t ) dxdt 0 Ω 0 Ω is satisfied for all v ∈ L 2 (0 , T ; H 1 0 (Ω)). Lemma � α∂ t u − ∆ x u � 2 L 2 (0 , T ; H − 1 (Ω)) = � w � 2 0 (Ω)) = a ( u , w ) L 2 (0 , T ; H 1 Corollary a ( u , v ) � α∂ t u − ∆ x u � L 2 (0 , T ; H − 1 (Ω)) ≤ sup � v � L 2 (0 , T ; H 1 0 � = v ∈ L 2 (0 , T ; H 1 0 (Ω)) 0 (Ω)) O. Steinbach Magdeburg, 24.10.2018 8 / 23
Norm equivalence 1 � � � α∂ t u � 2 L 2 (0 , T ; H − 1 (Ω)) + � u � 2 � α∂ t u − ∆ x u � 2 ≤ L 2 (0 , T ; H 1 L 2 (0 , T ; H − 1 (Ω)) 0 (Ω)) 2 � � � α∂ t u � 2 L 2 (0 , T ; H − 1 (Ω)) + � u � 2 ≤ 2 L 2 (0 , T ; H 1 0 (Ω)) Lemma 1 a ( u , v ) � � α∂ t u � 2 L 2 (0 , T ; H − 1 (Ω)) + � u � 2 √ 0 (Ω)) ≤ sup L 2 (0 , T ; H 1 � v � L 2 (0 , T ; H 1 2 0 � = v ∈ L 2 (0 , T ; H 1 0 (Ω)) 0 (Ω)) [Schwab, Stevenson 2009; Urban, Patera 2014; Andreev 2013; Mollet 2014; OS 2015; . . . ] O. Steinbach Magdeburg, 24.10.2018 9 / 23
Adjoint variational formulation to find u ∈ L 2 (0 , T ; H 1 0 (Ω)) such that � T � T � � � � − u ( x , t ) α∂ t v ( x , t )+ ∇ x u ( x , t ) ·∇ x v ( x , t ) dxdt = f ( x , t ) v ( x , t ) dxdt 0 Ω 0 Ω is satisfied for all v ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 , 0 (0 , T ; H − 1 (Ω)). O. Steinbach Magdeburg, 24.10.2018 10 / 23
Adjoint variational formulation to find u ∈ L 2 (0 , T ; H 1 0 (Ω)) such that � T � T � � � � − u ( x , t ) α∂ t v ( x , t )+ ∇ x u ( x , t ) ·∇ x v ( x , t ) dxdt = f ( x , t ) v ( x , t ) dxdt 0 Ω 0 Ω is satisfied for all v ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 , 0 (0 , T ; H − 1 (Ω)). Operator adjoint formulation L : L 2 (0 , T ; H 1 0 (Ω)) → [ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 , 0 (0 , T ; H − 1 (Ω))] ′ Operator primal formulation L : L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 0 , (0 , T ; H − 1 (Ω)) → [ L 2 (0 , T ; H 1 0 (Ω))] ′ O. Steinbach Magdeburg, 24.10.2018 10 / 23
Adjoint variational formulation to find u ∈ L 2 (0 , T ; H 1 0 (Ω)) such that � T � T � � � � − u ( x , t ) α∂ t v ( x , t )+ ∇ x u ( x , t ) ·∇ x v ( x , t ) dxdt = f ( x , t ) v ( x , t ) dxdt 0 Ω 0 Ω is satisfied for all v ∈ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 , 0 (0 , T ; H − 1 (Ω)). Operator adjoint formulation L : L 2 (0 , T ; H 1 0 (Ω)) → [ L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 , 0 (0 , T ; H − 1 (Ω))] ′ Operator primal formulation L : L 2 (0 , T ; H 1 0 (Ω)) ∩ H 1 0 , (0 , T ; H − 1 (Ω)) → [ L 2 (0 , T ; H 1 0 (Ω))] ′ Can we define 0 (Ω)) ∩ H 1 / 2 0 (Ω)) ∩ H 1 / 2 L : L 2 (0 , T ; H 1 0 , (0 , T ; L 2 (Ω)) → [ L 2 (0 , T ; H 1 , 0 (0 , T ; L 2 (Ω))] ′ O. Steinbach Magdeburg, 24.10.2018 10 / 23
Model problem u ′ ( t ) = f ( t ) for t ∈ (0 , T ) , u (0) = 0 Primal variational formulation: Find u ∈ H 1 0 , (0 , T ) such that � T � T for all v ∈ L 2 (0 , T ) u ′ ( t ) v ( t ) dt = a ( u , v ) = f ( t ) v ( t ) dt 0 0 Solution operator B 1 : H 1 0 , (0 , T ) → L 2 (0 , T ) O. Steinbach Magdeburg, 24.10.2018 11 / 23
Model problem u ′ ( t ) = f ( t ) for t ∈ (0 , T ) , u (0) = 0 Primal variational formulation: Find u ∈ H 1 0 , (0 , T ) such that � T � T for all v ∈ L 2 (0 , T ) u ′ ( t ) v ( t ) dt = a ( u , v ) = f ( t ) v ( t ) dt 0 0 Solution operator B 1 : H 1 0 , (0 , T ) → L 2 (0 , T ) Dual variational formulation: Find u ∈ L 2 (0 , T ) such that � T � T u ( t ) v ′ ( t ) dt = − for all v ∈ H 1 f ( t ) v ( t ) dt , 0 (0 , T ) 0 0 Solution operator B 0 : L 2 (0 , T ) → [ H 1 , 0 (0 , T )] ′ O. Steinbach Magdeburg, 24.10.2018 11 / 23
Model problem u ′ ( t ) = f ( t ) for t ∈ (0 , T ) , u (0) = 0 Primal variational formulation: Find u ∈ H 1 0 , (0 , T ) such that � T � T for all v ∈ L 2 (0 , T ) u ′ ( t ) v ( t ) dt = a ( u , v ) = f ( t ) v ( t ) dt 0 0 Solution operator B 1 : H 1 0 , (0 , T ) → L 2 (0 , T ) Dual variational formulation: Find u ∈ L 2 (0 , T ) such that � T � T u ( t ) v ′ ( t ) dt = − for all v ∈ H 1 f ( t ) v ( t ) dt , 0 (0 , T ) 0 0 Solution operator B 0 : L 2 (0 , T ) → [ H 1 , 0 (0 , T )] ′ Question for s ∈ (0 , 1) , s = 1 B s : [ L 2 (0 , T ) , H 1 0 , (0 , T )] s → [[ H 1 , 0 (0 , T )] ′ , L 2 (0 , T )] s 2 Related work: [Fontes 1996; Langer, Wolfmayr 2013; Larsson, Schwab 2015] O. Steinbach Magdeburg, 24.10.2018 11 / 23
Solution operator B 1 : H 1 0 , (0 , T ) → L 2 (0 , T ) Adjoint operator 1 : L 2 (0 , T ) → [ H 1 B ′ 0 , (0 , T )] ′ � u , B ′ for all u ∈ H 1 0 , (0 , T ) , v ∈ L 2 (0 , T ) 1 v � L 2 (0 , T ) = � B 1 u , v � L 2 (0 , T ) O. Steinbach Magdeburg, 24.10.2018 12 / 23
Solution operator B 1 : H 1 0 , (0 , T ) → L 2 (0 , T ) Adjoint operator 1 : L 2 (0 , T ) → [ H 1 B ′ 0 , (0 , T )] ′ � u , B ′ for all u ∈ H 1 0 , (0 , T ) , v ∈ L 2 (0 , T ) 1 v � L 2 (0 , T ) = � B 1 u , v � L 2 (0 , T ) Define A := B ′ 1 B 1 : H 1 0 , (0 , T ) → [ H 1 0 , (0 , T )] ′ Eigenvalue problem Au = λ u O. Steinbach Magdeburg, 24.10.2018 12 / 23
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.