Sources for this lecture 2. Shortest paths and minimum spanning - PowerPoint PPT Presentation
S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 1 S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 3 Sources for this lecture 2. Shortest paths and minimum spanning trees The material for this
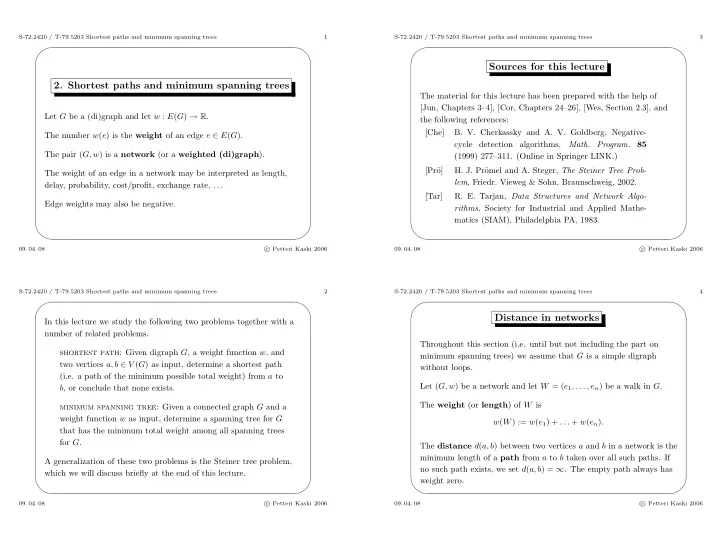
✬ ✩ ✬ ✩ S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 1 S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 3 Sources for this lecture 2. Shortest paths and minimum spanning trees The material for this lecture has been prepared with the help of [Jun, Chapters 3–4], [Cor, Chapters 24–26], [Wes, Section 2.3], and Let G be a (di)graph and let w : E ( G ) → R . the following references: [Che] B. V. Cherkassky and A. V. Goldberg, Negative- The number w ( e ) is the weight of an edge e ∈ E ( G ). cycle detection algorithms, Math. Program. 85 The pair ( G, w ) is a network (or a weighted (di)graph ). (1999) 277–311. (Online in Springer LINK.) [Pr¨ o] H. J. Pr¨ omel and A. Steger, The Steiner Tree Prob- The weight of an edge in a network may be interpreted as length, lem , Friedr. Vieweg & Sohn, Braunschweig, 2002. delay, probability, cost/profit, exchange rate, . . . [Tar] R. E. Tarjan, Data Structures and Network Algo- Edge weights may also be negative. rithms , Society for Industrial and Applied Mathe- matics (SIAM), Philadelphia PA, 1983. ✫ ✪ ✫ ✪ c c 09. 04. 08 � Petteri Kaski 2006 09. 04. 08 � Petteri Kaski 2006 ✬ ✩ ✬ ✩ S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 2 S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 4 Distance in networks In this lecture we study the following two problems together with a number of related problems. Throughout this section (i.e. until but not including the part on shortest path : Given digraph G , a weight function w , and minimum spanning trees) we assume that G is a simple digraph two vertices a, b ∈ V ( G ) as input, determine a shortest path without loops. (i.e. a path of the minimum possible total weight) from a to Let ( G, w ) be a network and let W = ( e 1 , . . . , e n ) be a walk in G . b , or conclude that none exists. The weight (or length ) of W is minimum spanning tree : Given a connected graph G and a weight function w as input, determine a spanning tree for G w ( W ) := w ( e 1 ) + . . . + w ( e n ) . that has the minimum total weight among all spanning trees for G . The distance d ( a, b ) between two vertices a and b in a network is the minimum length of a path from a to b taken over all such paths. If A generalization of these two problems is the Steiner tree problem, no such path exists, we set d ( a, b ) = ∞ . The empty path always has which we will discuss briefly at the end of this lecture. ✫ ✪ ✫ weight zero. ✪ c c 09. 04. 08 � Petteri Kaski 2006 09. 04. 08 � Petteri Kaski 2006
✬ ✩ ✬ ✩ S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 5 S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 7 Negative-weight edges Properties of shortest paths In general, the shortest path problem for arbitrary networks ( G, w ) Theorem A.15 Let ( G, w ) be a network without negative cycles and with negative edge weights is NP -hard. let W be a walk from a to b . Then, there exists a path P from a to b that satisfies w ( P ) ≤ w ( W ) . This is because a longest path in ( G, w ) is a shortest path in ( G, − w ). The problem of determining whether a graph contains a Proof: If W does not contain repeated vertices, we are done. long path is NP -complete. More specifically, the problem Otherwise, let ( e j , e j +1 , . . . , e k ), where e i = v i v i +1 ∈ E ( G ) for all j ≤ i ≤ k , be a subwalk of W for which all the vertices v i are hamiltonian path (decision) : Given a graph G as input, pairwise distinct except that v j = v k +1 . Such a subwalk is clearly a decide whether G contains a spanning path. cycle, and hence has nonnegative weight. By removing this cycle from W we obtain a walk from a to b whose weight is at most the is NP -complete, and remains so when restricted to graphs with only weight of W and with one less repeated vertex pair. Since walks are two vertices of degree one. Thus, an algorithm for shortest path finite, iterating this construction eventually gives us a path P from a on arbitrary networks enables us to solve hamiltonian path ✫ ✪ ✫ to b with w ( P ) ≤ w ( W ). � ✪ (decision) . c c 09. 04. 08 � Petteri Kaski 2006 09. 04. 08 � Petteri Kaski 2006 ✬ ✩ ✬ ✩ S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 6 S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 8 Theorem A.16 Let ( G, w ) be a network without negative cycles and let P be a shortest path from a to b . Then, any subpath P cd of P from c to d is a shortest path from c to d . Good algorithms for shortest path are known only in cases where Proof: To reach a contradiction, suppose that P cd is not a shortest the network does not contain cycles of negative weight ( negative path from c to d . Then, there exists a path P ′ cd from c to d that cycles ). satisfies w ( P ′ cd ) < w ( P cd ). Denote by P ac and P db the subpaths of P from a to c and from d to b , respectively. Now, the walk Detecting (and finding) negative cycles is relevant in several W ′ = P ac + P ′ cd + P db satisfies applications. For an example of an application in locating w ( W ′ ) = w ( P ac )+ w ( P ′ opportunities for arbitrage, see [Cor, Exercise 25-3]. cd )+ w ( P db ) < w ( P ac )+ w ( P cd )+ w ( P db ) = w ( P ) . By Theorem A.15 there exists a path P ′ from a to b that satisfies w ( P ′ ) ≤ w ( W ′ ), which is a contradiction since P is a shortest path from a to b . Thus, P cd is a shortest path from c to d . � ✫ ✪ ✫ ✪ c c 09. 04. 08 � Petteri Kaski 2006 09. 04. 08 � Petteri Kaski 2006
✬ ✩ ✬ ✩ S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 9 S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 11 Properties of the labeling method Corollary A.3 Let ( G, w ) be a network without negative cycles. Then, for any two vertices s, b ( s � = b ), Lemma A.1 The labeling method maintains the invariant that there d ( s, b ) = min { d ( s, a ) + w ( ab ) : a ∈ N − ( b ) } . exists a walk W from s to v with w ( W ) = d [ v ] . Proof: By induction on the number of labeling steps. � Proof: The claim clearly holds if b is not accessible from s . Otherwise, a shortest path P from s to b has to contain a last edge Lemma A.2 When the labeling method halts, w ( W ) ≥ d [ v ] for any ab . By Theorem A.16, the subpath P sa from s to a is a shortest path. walk W from s to v . Consequently, d ( s, b ) = w ( P ) = w ( P sa ) + w ( ab ) = d ( s, a ) + w ( ab ). � Proof: By induction on the number of edges in W . � ✫ ✪ ✫ ✪ c c 09. 04. 08 � Petteri Kaski 2006 09. 04. 08 � Petteri Kaski 2006 ✬ ✩ ✬ ✩ S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 10 S-72.2420 / T-79.5203 Shortest paths and minimum spanning trees 12 The labeling method Theorem A.17 When the labeling method halts, d [ v ] is the length of a shortest path from s to v if v is reachable from s ; otherwise, d [ v ] = ∞ . If there is a negative cycle reachable from s , the method The labeling method was discovered by Ford (1956, 1962). The never halts. exposition here follows [Tar, Chapter 7]. The labeling method takes as input a network ( G, w ) and a source vertex s ∈ V ( G ). Proof: If G contains a negative cycle reachable from s , there are arbitrarily short walks from s to any vertex in the cycle. Thus, the The method maintains a tentative distance d [ v ] and a tentative labeling method cannot halt in the presence of negative cycles parent vertex p [ v ] for each vertex v ∈ V ( G ). Initially p [ v ] = undef because this would contradict Lemma A.2. and d [ v ] = ∞ for all v ∈ V ( G ), with the exception of d [ s ] = 0. Hence, there are no negative cycles reachable from s if the labeling The method performs a series of labeling steps : method halts. Consequently, to any shortest walk there is a path of Select an edge ab ∈ E ( G ) such that d [ a ] + w ( ab ) < d [ b ]. the same length by Theorem A.15. So, by Lemmata A.1 and A.2, Put d [ b ] ← d [ a ] + w ( ab ) and p [ b ] ← a . d [ v ] < ∞ is the length of a shortest path from s to v ; moreover, d [ v ] = ∞ if and only if v is not reachable from s . � ✫ When no labeling step can be performed, the method halts. ✪ ✫ ✪ c c 09. 04. 08 � Petteri Kaski 2006 09. 04. 08 � Petteri Kaski 2006
Recommend


















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.