A-tree Routing Algorithm Compute dx ( c, F 0 ), dy ( c, F 0 ), df ( - PowerPoint PPT Presentation
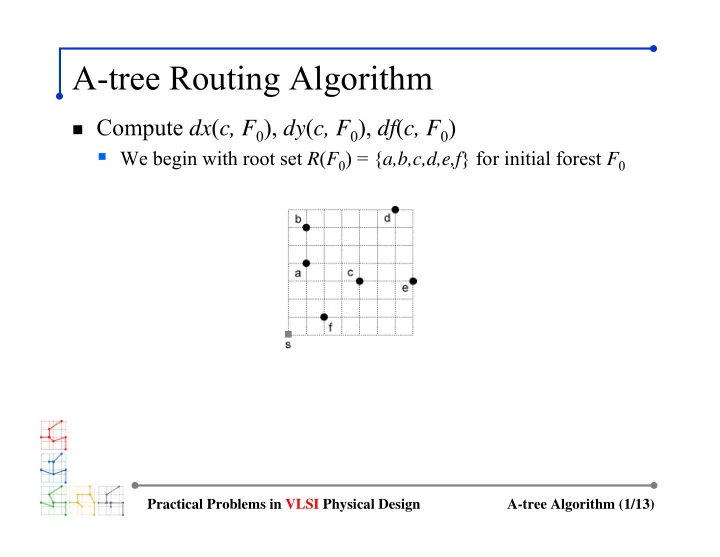
A-tree Routing Algorithm Compute dx ( c, F 0 ), dy ( c, F 0 ), df ( c, F 0 ) We begin with root set R ( F 0 ) = { a,b,c,d,e,f } for initial forest F 0 Practical Problems in VLSI Physical Design A-tree Algorithm (1/13) Recall that mx =
A-tree Routing Algorithm � Compute dx ( c, F 0 ), dy ( c, F 0 ), df ( c, F 0 ) � We begin with root set R ( F 0 ) = { a,b,c,d,e,f } for initial forest F 0 Practical Problems in VLSI Physical Design A-tree Algorithm (1/13)
Recall that … mx = a, dx = 3 my = d, dx = 2 Practical Problems in VLSI Physical Design A-tree Algorithm (2/13)
Recall that … (cont) MF = { f, i } , df = 4 , mf w = i, mf s = f Practical Problems in VLSI Physical Design A-tree Algorithm (3/13)
Computing dx/dy/df for Node c Practical Problems in VLSI Physical Design A-tree Algorithm (4/13)
Computing dx/dy/df Values � Compute dx/dy/df for all other nodes Practical Problems in VLSI Physical Design A-tree Algorithm (5/13)
Safe Move Computation � What kind of safe moves does node a contain? � We have dx ( a , F 0 ) = ∞ , dy ( a , F 0 ) = 1, df ( a , F 0 ) = 5 � Type 1: dx ≥ df and dy ≥ df � Type 2: dx ≥ df and dy < df � Type 3: dx < df and dy ≥ df � So a has type-2 safe move Practical Problems in VLSI Physical Design A-tree Algorithm (6/13)
Safe Move Computation (cont) � Compute safe moves for all nodes in F 0 � Type 1: dx ≥ df and dy ≥ df � Type 2: dx ≥ df and dy < df � Type 3: dx < df and dy ≥ df � All moves are safe � No heuristic moves necessary Practical Problems in VLSI Physical Design A-tree Algorithm (7/13)
Recall that … Practical Problems in VLSI Physical Design A-tree Algorithm (8/13)
Recall that … (cont) Practical Problems in VLSI Physical Design A-tree Algorithm (9/13)
Safe Move for Node a � Perform safe move for node a (type 2) Practical Problems in VLSI Physical Design A-tree Algorithm (10/13)
Safe Move for Node a (cont) � Updating dx/dy/df values and safe moves Practical Problems in VLSI Physical Design A-tree Algorithm (11/13)
Performing Remaining Safe Moves � Choose the nodes in alphabetical order Practical Problems in VLSI Physical Design A-tree Algorithm (12/13)
Performing Remaining Moves � Final rectilinear Steiner arborescence � All source-sink paths are shortest � Total wirelength = 18 � 3 Steiner nodes (white square) used � All moves performed were safe Practical Problems in VLSI Physical Design A-tree Algorithm (13/13)
Recommend













![[Idea taken from Gilles Tredan] Everybody wants to be at ETHZ What if a link fails?](https://c.sambuz.com/1088091/idea-taken-from-gilles-tredan-s.webp)


More recommend
Explore More Topics
Stay informed with curated content and fresh updates.