Simulations of the quadrilateral- -based based Simulations of the - PowerPoint PPT Presentation
Simulations of the quadrilateral- -based based Simulations of the quadrilateral localization localization Cluster success rate v.s. node degree. Each plot represents a simulation run. 9/15/05 Jie Gao CSE590-fall05 1 Random
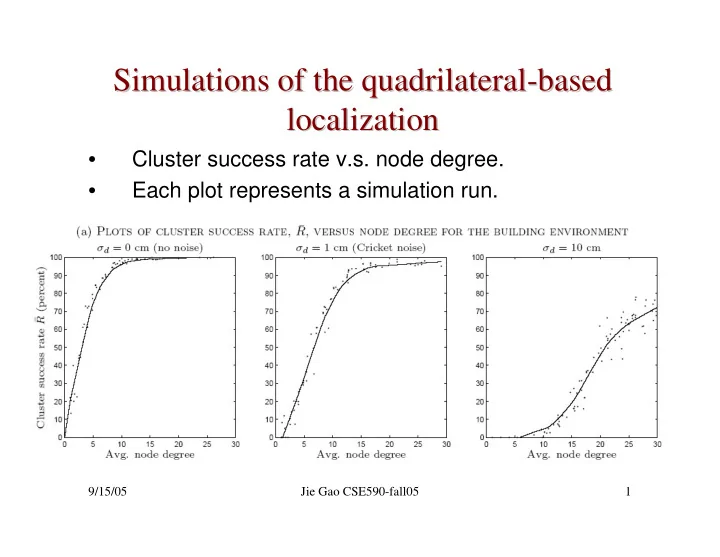
Simulations of the quadrilateral- -based based Simulations of the quadrilateral localization localization Cluster success rate v.s. node degree. • Each plot represents a simulation run. • 9/15/05 Jie Gao CSE590-fall05 1
Random deployment Random deployment • Poisson distribution does not look uniform. • ~400 nodes, average degree is about 5. 9/15/05 Jie Gao CSE590-fall05 2
Random deployment Random deployment • Poisson distribution does not look uniform. • ~800 nodes, average degree is about 10. 9/15/05 Jie Gao CSE590-fall05 3
What you can do & what you can not do What you can do & what you can not do by using angles… … by using angles 9/15/05 Jie Gao CSE590-fall05 4
Localization by distance information Localization by distance information • Flipping causes the trouble, especially for sparse graph. • Intuition: angle information helps to eliminate incorrect flips. 9/15/05 Jie Gao CSE590-fall05 5
What does angle information buy us? What does angle information buy us? Lemma: By local angles of a unit-disk graph, we can determine all pairs of crossing edges in a valid embedding. If AB crosses CD in UDG, then by the crossing lemma, one of them, say B, has edges to the other three nodes. 9/15/05 Jie Gao CSE590-fall05 6
Local angle information Local angle information • Using local angle information only can not solve the localization problem in the worst case – UDG embedding is NP-hard with only local angle info. • Preliminary experiments show the effectiveness of using angle information in sparse graphs. • More to be explored as to what one can do with angle information. 9/15/05 Jie Gao CSE590-fall05 7
NP- -hard hard NP � UDG embedding Local angle info � UDG embedding Local angle info 9/15/05 Jie Gao CSE590-fall05 8
Yet a different ambiguity Yet a different ambiguity Consider a unit-disk graph, where the two ‘teeth’ do not cross: 2 l l 3 2 l 2 l 3 3 2 l 3 11 l 6 9/15/05 Jie Gao CSE590-fall05 9
Two valid embeddings Two valid embeddings Consider a unit-disk graph, where the two ‘teeth’ do not cross: Case 1 : Case 2 : 2 2 l l l l 3 3 2 2 l l 2 2 l l 3 3 3 3 2 2 l l 3 3 11 11 l l 6 6 9/15/05 Jie Gao CSE590-fall05 10
UDG embedding with angle info is NP- - UDG embedding with angle info is NP hard hard • Reduction from 3SAT problem: represent the 3SAT graph by a UDG. 9/15/05 Jie Gao CSE590-fall05 11
Represent a binary variable by the ambiguity Represent a binary variable by the ambiguity Consider a unit-disk graph, where the two ‘teeth’ do not cross: Case 1 : Case 2 : 1 2 1 2 l l l ≤ l ≥ ≤ ≥ 2 3 2 3 x 1 = 0 x x x 1 = 0 1 = 1 1 = 1 2 2 l l l l 3 3 2 2 l l 2 2 l l 3 3 3 3 2 2 l l 3 3 11 11 l l 6 6 9/15/05 Jie Gao CSE590-fall05 12
Some basic building blocks Some basic building blocks • A chain of 2l+1 nodes has length at most 2l and at least l . • A “triangle” with fixed aspect ratio between its edges. 9/15/05 Jie Gao CSE590-fall05 13
0/1 block – – the true realization by UDG the true realization by UDG 0/1 block x x x x Case 1 : 1 = 0 Case 2 : 1 = 1 1 = 1 1 = 0 Use triangles to enforce that the teeth are large enough. 9/15/05 Jie Gao CSE590-fall05 14
Formulate the 3SAT problem as a graph Formulate the 3SAT problem as a graph 3SAT instance: 3SAT graph: 9/15/05 Jie Gao CSE590-fall05 15
Realize a 3SAT clause by a UDG Realize a 3SAT clause by a UDG 3SAT clause: x 1 x 2 x 3 1 2 v , v , v : or l l ≤ ≥ 1 2 3 2 3 9/15/05 Jie Gao CSE590-fall05 16
NP- -hardness hardness NP • What we have shown: finding an embedding without incorrect crossings is NP-hard. • Thus, finding a valid embedding is NP-hard. • Lemma: a -approx. embedding has no incorrect 2 crossings. 2 • -approximate embedding is also NP-hard. • The hardness results use degenerate configurations that do not happen often in practice. 9/15/05 Jie Gao CSE590-fall05 17
A localization algorithm with angle A localization algorithm with angle information information 9/15/05 Jie Gao CSE590-fall05 18
Embedding by angle information Embedding by angle information We formulate an optimization problem: Variables: lengths of edges, . • Fix a node as the origin. • All angles are measured against x -axis. Each node’s position (x, y) is a linear function of the variables. 9/15/05 Jie Gao CSE590-fall05 19
Embedding by angle information Embedding by angle information We formulate an optimization problem: Variables: lengths of edges, . Constraints: 1. Edge length constraint 2. Cycle constraint: for a cycle with edges 3. Unit disk graph property. For two nodes u, v without an edge, |uv|>1. Non-convex. So we can’t solve it. 9/15/05 Jie Gao CSE590-fall05 20
An embedding method by LP An embedding method by LP We formulate a linear programming problem: Variables: lengths of edges, . Relax the constraints: use as many linear constraints as possible: 1. Edge length constraint 2. Cycle constraint: for a cycle with edges 9/15/05 Jie Gao CSE590-fall05 21
An embedding method by LP An embedding method by LP We formulate a linear programming problem: Variables: lengths of edges, . C Linear Constraints: A 3. ∃ edges AB, BC, and no AC B α for quasi-UDG 4. Crossing edge constraint: 9/15/05 Jie Gao CSE590-fall05 22
Practical embedding using local angles Practical embedding using local angles The LP doesn’t necessarily produces a valid embedding, but it works well in practice. True Network (600 nodes) Embedding 9/15/05 Jie Gao CSE590-fall05 23
Practical embedding using local angles Practical embedding using local angles The LP doesn’t necessarily produces a valid embedding, but it works well in practice. True Network (600 nodes) Embedding 9/15/05 Jie Gao CSE590-fall05 24
Performance evaluation Performance evaluation Largest connected component 9/15/05 Jie Gao CSE590-fall05 25
Noisy angle measurements and Quasi- - Noisy angle measurements and Quasi UDG UDG • α =0.8, angle can err 12 ° from the real value. True Network (225 nodes) Embedding 9/15/05 Jie Gao CSE590-fall05 26
Further work on using local information Further work on using local information Linear programming is centralized. • We seek a distributed localization algorithm with • angle information that works well for sparse graphs. 9/15/05 Jie Gao CSE590-fall05 27
Algorithm challenges Algorithm challenges • Noisy measurements – Optimization • Insufficient connectivity, continuous deformation – Rigidity theory – Angle information • Hardness of embedding 9/15/05 Jie Gao CSE590-fall05 28
System challenges System challenges • Physical layer imposes measurement challenges – Multipath, shadowing, sensor imperfections, changes in propagation properties and more • Extensive computation aspects – Many formulations of localization problems, how do you solve the optimization problem? – How do you solve the problem in a distributed manner, under computation and storage constraints? • Networking and coordination issues – Nodes have to collaborate and communicate to solve the problem – If you are using it for routing, it means you don’t have routing support to solve the problem! How do you do it? • System Integration issues – How do you build a whole system for localization? – How do you integrate location services with other applications? – Different implementation for each setup, sensor, integration issue 9/15/05 Jie Gao CSE590-fall05 29
Location- -based Routing in based Routing in Location Sensor Networks Sensor Networks Jie Gao Computer Science Department Stony Brook University 9/15/05 Jie Gao CSE590-fall05 30
Papers Papers • [Bose01] P. Bose, P. Morin, I. Stojmenovic and J. Urrutia, Routing with guaranteed delivery in ad hoc wireless networks , Wireless Networks, 7(6), 609-616, 2001. • [Karp00] Karp, B. and Kung, H.T., Greedy Perimeter Stateless Routing for Wireless Networks , in MobiCom 2000. 9/15/05 Jie Gao CSE590-fall05 31
Routing in ad hoc networks Routing in ad hoc networks • Routing protocols in communication networks obtain route information between pairs of nodes wishing to communicate. • Proactive protocols: the protocol maintains routing tables at each node that is updated as changes in the network topology are detected. • Reactive protocols: routes are constructed on demand. No global routing table is maintained. • Due to the high rate of topology changes, reactive protocols are more appropriate for ad hoc networks. – Ad hoc on demand distance vector routing (AODV) – Dynamic source routing (DSR) • However, both depend on flooding for route discovery. 9/15/05 Jie Gao CSE590-fall05 32
Recommend

![Walking in Poisson Delaunay triangulations Olivier Devillers [D. & Hemsley, 2016] [Chenavier](https://c.sambuz.com/999070/walking-in-poisson-delaunay-triangulations-s.webp)

More recommend
Explore More Topics
Stay informed with curated content and fresh updates.