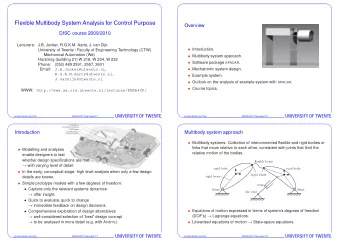
Simulation of Flexible Multibody Systems Robert Altmann Technische - PowerPoint PPT Presentation
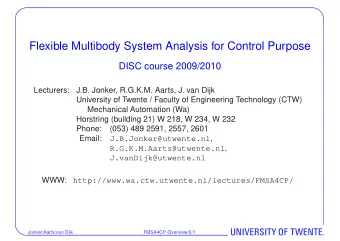
Simulation of Flexible Multibody Systems Robert Altmann Technische Universit at Berlin raltmann@math.tu-berlin.de Trogir 2011, October 12th R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 1 / 6 Multibody Dynamics
Simulation of Flexible Multibody Systems Robert Altmann Technische Universit¨ at Berlin raltmann@math.tu-berlin.de Trogir 2011, October 12th R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 1 / 6
Multibody Dynamics Dynamics of multiple rigid bodies E.g. robots R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 2 / 6
Multibody Dynamics Dynamics of multiple rigid bodies E.g. robots, slider crank mechanism y 2 Y x 2 p 2 y 1 x 1 p 1 X DAE of index 3 p ) − G T λ M ( p )¨ p = f ( p, ˙ 0 = g ( p ) R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 2 / 6
Flexible Multibody Systems Assumption of rigid bodies not accurate Allow deformable bodies R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 3 / 6
Flexible Multibody Systems Assumption of rigid bodies not accurate Allow deformable bodies Y p 2 p 1 u ∈ H 1 0 (Ω) X Combine deformation and rigid motion Linear elasticity (PDE) R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 3 / 6
Equations of Motion Euler-Lagrange Formalism � ∂L � d − ∂L ∂p = 0 with strain energy ∂ ˙ dt p Principle of virtual work ◮ Weak formulation of dynamic elasticity problem ◮ Moving reference frame ◮ Rigid body transformation u �→ r = y ( t ) + A ( φ )[ x + u ( x, t )] Langrange multipliers ◮ Weak formulation of dynamic elasticity problem ◮ Rigid motion as (weak) constraint M ¨ u + D ˙ u + K u + B ∗ λ u = F B u = G R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 4 / 6
Simulation Coupled system of ODEs, PDEs and algebraic constraints Different time scales for rigid motion / elastic deformation Standard procedure: Semi-discretization in ◮ Time (Rothe method) ◮ Space (Method of Lines) → DAE of index 3 Finite Element discretization R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 5 / 6
Simulation Coupled system of ODEs, PDEs and algebraic constraints Different time scales for rigid motion / elastic deformation Standard procedure: Semi-discretization in ◮ Time (Rothe method) ◮ Space (Method of Lines) → DAE of index 3 Finite Element discretization My work Multiphysics Need adaptivity in space and time ! Method of Lines with mesh update, index reduction Possibility to switch between index- 1 formulations R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 5 / 6
Literature Peter Kunkel and Volker Mehrmann, Differential-algebraic equations , EMS Textbooks in Mathematics, European Mathematical Society (EMS), Z¨ urich, 2006, Analysis and numerical solution. MR 2225970 (2007e:34001) B. Simeon, Modelling a flexible slider crank mechanism by a mixed system of DAEs and PDEs , Mathematical and Computer Modelling of Dynamical Systems 2 (1996), 1–18. , Numerische Simulation gekoppelter Systeme von partiellen und dierential-algebraischen Gleichungen der Mehrk¨ orperdynamik , Rechnerunterst¨ utzte Verfahren, vol. 325, VDI Verlag Dusseldorf, 2000. R. Altmann (TU Berlin) Simulation of Flexible MBS Trogir 12.10.2011 6 / 6
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.