Shadow Walking An Unencumbered Locomotion Technique for Systems - PowerPoint PPT Presentation
Shadow Walking An Unencumbered Locomotion Technique for Systems with Under-floor Projection David J. Zielinski, Ryan P. McMahan, Rachael B. Brady Motivation: Walking in Place An alternative to real-walking locomotion Overcomes the requirement
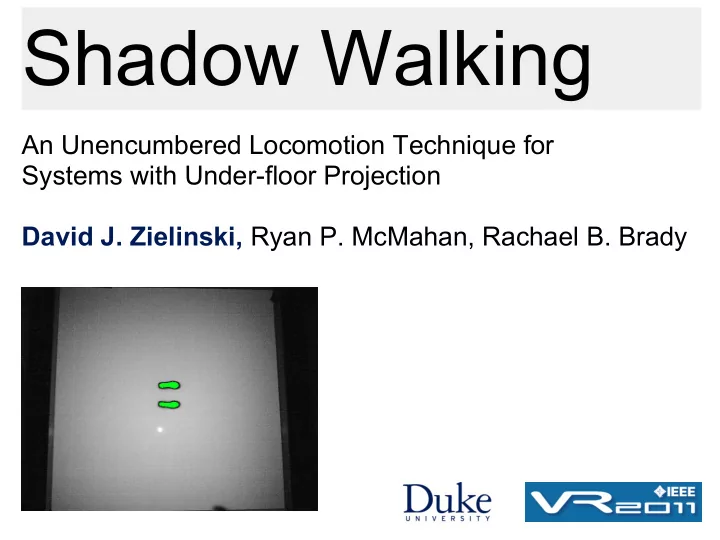
Shadow Walking An Unencumbered Locomotion Technique for Systems with Under-floor Projection David J. Zielinski, Ryan P. McMahan, Rachael B. Brady
Motivation: Walking in Place An alternative to real-walking locomotion Overcomes the requirement for a large physical space Uses same muscles as real walking (increased presence)
Related Work Slater, M., Usoh, M., and Steed, A., 1995. Analyze head position with a neural net Templeman et al, "Gaiter" 1999. Feasel, Whitton, and Wendt. 2008 Trackers on knees, sensors in insoles Swapp, Williams, Steed. "Wizdish" 2010 User walks in a dish with low friction shoes Various device based systems Treadmills, Bicycles, ...
Shadow Tracking Track the shadows cast by the user's feet to calculate ground-plane location, orientation, and step events.
Let's See the System in Action!
System Setup 6-sided cube. 3m x 3m x 3m. PS3 Eye Webcam 640x480 @ 30 fps
Simple Low Latency Image Processing Original Blur (radius=2) Threshold (val<30)
Calculating Position and Orientation Center of Mass Furthest Point Orientation
Step Determination Cluster 1 Cluster 2 1-Foot State if Cluster 2 / Cluster 1 < 50% then state 1 2-Foot State if Cluster 2 / Cluster 1 > 75% then state 2 if state transitions, then send step event to the VE
Extended Gestures
First Impressions Easy and natural to use Range of walking speeds Can we compare our technique to the IS-900 head tracker? Walking in place with turning. mean yaw error = 7.3° (σ = 5.0°) Walking around mean pos error = 13.4 cm (σ = 3.2 cm)
Advantages Unencumbered Low Cost: $40 Camera (+ $1M VR System) No per user calibration
Limitations Need to have a system that was built for underfloor projection Need to walk with a flat footed step to detect orientation. Dependence on scene for illumination (our testing was done with an idealized scene) No Droopy Pants
Future Work - Robustness Can we increase position and orientation accuracy ? User study Ideas: How well does our technique integrate into existing VR applications ? Does our technique work across a range of foot sizes? Eliminate dependency on scene Low illumination Non-uniform floor illumination.
Future Work - Applications Additional extended gestures Collaborative walking Artistic purposes: sound generation collaborate with dancers
Authors David J. Zielinski Software Engineer for the Visualization Technology Group Ryan P. McMahan Ph.D. Candidate Rachael B. Brady Director of the Visualization Technology Group
Thank You! Questions? http://www.duke.edu/~djzielin/
Bonus Slide: Algorithm For Travel at each frame if only one step event in the queue completion_time = 0.5 else completion_time = step time stamp - next step time stamp speed = 0.5 / completion_time //in ft per second do travel if time spent on this step > completion_time pop step off the queue
Recommend








More recommend
Explore More Topics
Stay informed with curated content and fresh updates.