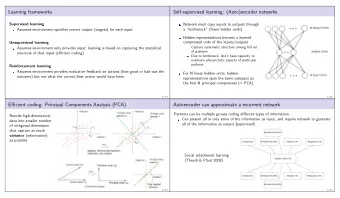
Self-Supervised Deep Learning for Robotic Grasping Lars Berscheid | - PowerPoint PPT Presentation
Self-Supervised Deep Learning for Robotic Grasping Lars Berscheid | KUKA Roboter GmbH | 10/10/2017 Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 1 From Robotic Grasping to Bin Picking - Bin
Self-Supervised Deep Learning for Robotic Grasping Lars Berscheid | KUKA Roboter GmbH | 10/10/2017 Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 1
From Robotic Grasping to Bin Picking - Bin Picking: Grasps from an unsorted bin (often just one object type) - Essential for logistic applications , household robotics and so much more… - Traditional approaches are: - Not robust - Or not flexible - And often slow Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 2
Robotic System Fig. 1: KUKA LBR iiwa robot arm - Depth camera at flange - Force feedback gripper Fig. 2: Planar Grasps with 4 parameters Planar coordinates (x, y, a) and gripper position d Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 3
Sliding Window Approach Fig. 3: Depth Image Example Red : Relevant window (outer), approx. position of the grippers (inner) Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 4
Neural Net Fig. 4: Net Architecture Window Grasp Neural Net Variable input Depth Image Probability Training Inference Input 32 × 32 110 × 110 Output 1 × 1 × 3 40 × 40 × 3 10 rotations (transformed input) 3 gripper position Performance (20ms for 48000 poses) on a NVIDIA GTX 1070 Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 5
Neural Net Fig. 5: Heatmap Neural Net Red : High Grasping Probability Blue : Low Grasping Probability Averaged over rotation and gripper position. During inference, one of the 5 best poses is chosen randomly. Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 6
Training - Up to 12500 grasp recordings ( ≈ 35h, 10s) - Active learning - Adapt gripper force - Data augmentation - Asymmetric error measure - Automated recording and training Fig. 6: Test Error depending on Training Set Size Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 7
Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 8
Results Tab. 1: Grasping rate at different scenarios: m objects in the bin, n objects are taken out without replacement, grasping rate is percentage of successful grasps . Random grasping rate ≈ 3% m out of n Grasping rate [%] Time for n grasps [s] Number Grasp tries 1 out of 1 99,5 ± 0,5 10,7 ± 0,1 210 5 out of 5 98,2 ± 1,2 56,7 ± 0,7 112 5 out of 10 95,2 ± 2,2 59,0 ± 1,1 105 10 out of 20 92,2 ± 2,2 117,2 ± 2,2 141 Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 9
Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 10
Generalisation Fig. 7: Grasps of novel objects Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 11
Specific Grasps Fig. 9: Markings of grasped objects (blue) Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 12
Specific Grasps Dataset Generation Create random points in image space → only if objects is grasped and point is within the marking, it is a successful grasp. Window Depth-Image Grasp probability of Neural Net specific object Point in image Fig. 10: Net architecture for specific grasps Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 13
Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 14
Self-Supervised Deep Learning for Robotic Grasping - Learns grasping rates of 90-95% for bin picking in under 35h - High performance with under 20ms per grasp inference - Automated data recording and training - Generalizes to many object types - Specific grasps of objects Self-Supervised Deep Learning for Robotic Grasping | Lars Berscheid | 10/10/2017 | www.kuka.com 15
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.