Sampling and Connection Strategies for Probabilistic Strategies for - PDF document
1/31/2012 Two Types of Strategies Where to sample new milestones? Sampling strategy Sampling and Connection Strategies for Probabilistic Strategies for Probabilistic Which milestones to connect? Which milestones to connect?
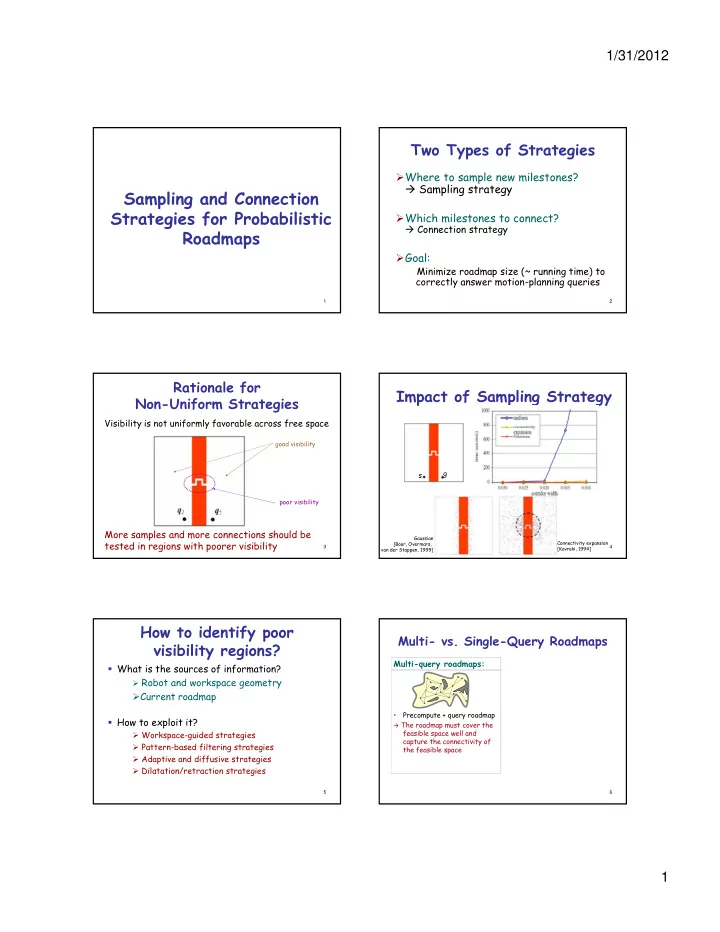
1/31/2012 Two Types of Strategies � Where to sample new milestones? � Sampling strategy Sampling and Connection Strategies for Probabilistic Strategies for Probabilistic � Which milestones to connect? � Which milestones to connect? � Connection strategy Roadmaps � Goal: Minimize roadmap size (~ running time) to correctly answer motion-planning queries 1 2 Rationale for Impact of Sampling Strategy Non-Uniform Strategies Visibility is not uniformly favorable across free space good visibility g s poor visibility More samples and more connections should be Gaussian tested in regions with poorer visibility Connectivity expansion [Boor, Overmars, 3 [Kavraki, 1994] 4 van der Stappen, 1999] How to identify poor Multi- vs. Single-Query Roadmaps visibility regions? Multi-query roadmaps: � What is the sources of information? � Robot and workspace geometry � Current roadmap • Precompute + query roadmap � How to exploit it? � The roadmap must cover the feasible space well and � Workspace-guided strategies capture the connectivity of � Pattern-based filtering strategies the feasible space � Adaptive and diffusive strategies � Dilatation/retraction strategies 5 6 1
1/31/2012 Multi- vs. Single-Query Roadmaps Multi- vs. Single-Query Roadmaps Multi-query roadmaps: Single-query roadmaps: Multi-query roadmaps: Single-query roadmaps: g g s s • Precompute + query roadmap • Compute roadmap from • Precompute + query roadmap • Compute roadmap from scratch for each query scratch for each query � The roadmap must cover the � The roadmap must cover the feasible space well and � The roadmap should capture feasible space well and � The roadmap should capture capture the connectivity of just enough of the capture the connectivity of just enough of the the feasible space connectivity of the feasible the feasible space connectivity of the feasible space to connect the start space to connect the start and goal configurations and goal configurations Some strategies are more suitable for multi-query roadmaps, others for single query-roadmaps 7 8 Workspace-Guided Strategies � Workspace-guided strategies Identify narrow passages in the workspace and map them into the configuration space � Rationale: Most narrow passages in the feasible space are caused by narrow passages in the workspace � Pattern-based filtering strategies Sample many configurations, find interesting � Method: patterns, and retain only promising configurations p y p g g • Detect narrow passages in the workspace (e g cell Detect narrow passages in the workspace (e.g., cell decomposition, medial-axis transform) � Adaptive and diffusive strategies • Sample robot configurations that place selected robot points Adjust the sampling distribution ( π ) on the fly in workspace’s narrow passages � Dilatation/retraction strategies - H. Kurniawati and D. Hsu. Workspace importance sampling for probabilistic roadmap planning. In Proc. IEEE/RSJ Int. Conf. on Intelligent Robots & Systems, pp. 1618–1623, Dilate the feasible space to make it more 2004. expansive - J.P. van den Berg and M. H. Overmars. Using Workspace Information as a Guide to Non- Uniform Sampling in Probabilistic Roadmap Planners. IJRR, 24(12):1055-1071, Dec. 2005. 9 10 Limitations Workspace-Guided Strategies � Works well for rigid objects, but not so well for articulated robots, such as manipulator arms Why? � Not all narrow passages are obvious to detect in workspace What are the narrow passages? Workspace-guided sampling Uniform sampling 11 12 2
1/31/2012 Non-Uniform Sampling Filtering Strategies Strategies Main Idea: � Sample several configurations in the same small region of configuration space � Workspace-guided strategies � If a “pattern” is detected, then retain one of the � Pattern-based filtering strategies configurations as a milestone � More sampling work, but better distribution of nodes � M s mplin k b t b tt dist ib ti n f n d s � Adaptive and diffusive strategies � Less time wasted later connecting “non-interesting” � Deformation strategies milestones Methods: - V. Boor, M. H. Overmars, and A. F. van der Stappen. The Gaussian sampling strategy for probabilistic roadmap � Gaussian sampling planners. In Proc. 1999 IEEE Int. Conf. Robotics and Automation, 1999, pp. 1018–1023. � Bridge Test - Z. Sun, D. Hsu, T. Jiang, H. Kurniawati, and J. Reif . � Hybrid Narrow passage sampling for probabilistic roadmap 13 14 planners. IEEE Trans. on Robotics, 21(6):1105–1115, 2005. Gaussian Sampling Gaussian Distribution 1) Sample a configuration q uniformly at random from N [ μ , σ ] (x) = configuration space 2) Sample a direction u in configuration space uniformly at random and a distance d with Gaussian distribution N [0, σ ] . Set q’ to the configuration a distance d from q g [0, σ ] f x f x ( ) ( ) = = along direction u 3) If only one of q and q’ is in feasible space, retain the one in feasible space as a milestone; else retain none What is the effect? What is the intuition? 15 Example of Node Distribution Uniform vs. Gaussian Sampling Milestones (13,000) created by uniform Milestones (150) created by Gaussian sampling before the narrow passage was sampling adequately sampled The gain is not in sampling fewer milestones, but in connecting fewer pairs of milestones 17 18 3
1/31/2012 Example of Distribution Bridge Test Generated Using Bridge Test 1) Sample two conformations q and q’ using Gaussian sampling technique 2) If none is in feasible space, then if q m = ( q + q ’)/2 is in feasible space, then retain q m as a milestone 3) Else retain none What is the effect? What is the intuition? 19 20 Another Example of Bridge-Test Gaussian vs. Bridge Test Distribution 8-joint robot with mobile base Gaussian Bridge test 21 22 Another Example of Bridge-Test Drawback of Gaussian and Distribution Bridge-Test Sampling They assume the existence of nasty 7-joint robot narrow passages with fixed base � They are slow when there are none! � They are slow when there are none! Solution: Hybrid adaptive strategy (a combination of strategies) 23 24 4
1/31/2012 One Possible Hybrid Sampling Strategy At each sampling operation do the following: Uniform 1) With probability π 1 sample a milestone using Bridge-Test sampling and exit 2) With probability π 2 sample a milestone using Gaussian sampling and exit 3) 3) Sample a milestone uniformly at random Sample a milestone uniformly at random Start with π 1 = 0 and π 2 = 0. After N 1 milestones have been generated, Uniform Bridge increase π 2 slowly after each sampling operation. + test Bridge After N 2 > N 1 milestones have been generated, test increase π 1 slowly (but at a slightly faster rate than π 2 ). What is the intuition? 25 26 Non-Uniform Sampling Adaptive/Diffusive Strategies Strategies Main idea: Use information gathered during roadmap construction � Workspace-guided strategies to adjust the sampling probability measure � Time-varying sampling measure � Pattern-based filtering strategies � Adaptive and diffusive strategies Methods: • Identification of “difficult” regions � Dilatation/retraction strategies • Diffusion • Adaptive steps • π = α 1 π 1 + α 2 π 2 + ... + α n π n , where the π i are constant and the π i are adjusted, e.g., using machine learning techniques 27 28 Connectivity Expansion Detection of “Difficult” Regions Use work already done to detect poor- Idea: Use failures to connect milestones to identify regions with poor visibility visibility regions [Kavraki, 94] [Kavraki, 94] 29 30 5
1/31/2012 Diffusion Strategy Example of Distribution Idea: Grow distributions from “seed” configurations (e.g., the start and the goal configurations) g s 31 32 Diffusion Strategy Adaptive-Step Sampling Idea: Grow distributions from “seed” configurations (e.g., the start and the goal configurations) Two main techniques: � Pick a milestone q with probability proportional to the inverse of the g g local sampling density. Sample a new configuration q’ at random around q s � Pick a conformation q t at random in configuration space. Identify the closest milestone q from q t . Sample a new configuration q’ at random around q , possibly in the direction of q t (RRT) Intuition? [Sánchez-Ante, 2003] 33 34 Non-Uniform Sampling Dilatation/Retraction Strategies Strategies Main idea: Dilate the feasible space to make it � Workspace-guided strategies more expansive � Pattern-based filtering strategies � Adaptive and diffusive strategies Motivation: � Dilatation/retraction strategies 35 36 6
Recommend














More recommend
Explore More Topics
Stay informed with curated content and fresh updates.