
SLIDE 1
Sampled data control
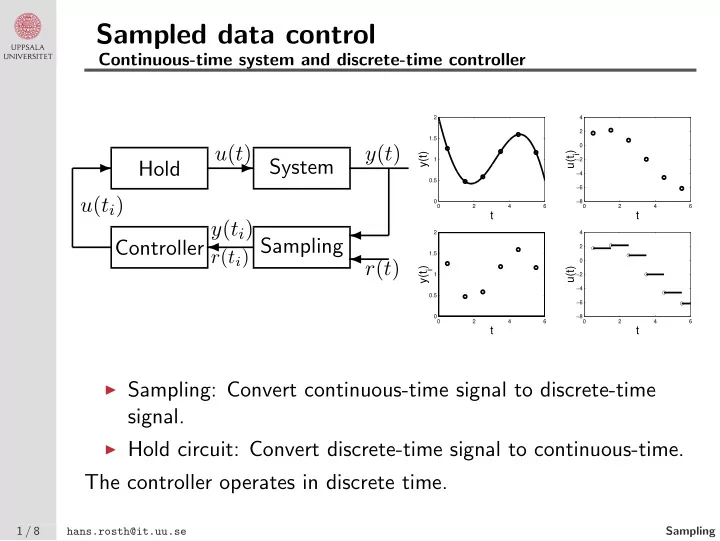
Continuous-time system and discrete-time controller
Sampling Controller Hold System
✲ ✲ ✛ ✛ ✛
r(t) y(t)
r(ti)
y(ti) u(ti) u(t)
2 4 6 0.5 1 1.5 2
y(t) t
2 4 6 −8 −6 −4 −2 2 4
u(ti) t
2 4 6 0.5 1 1.5 2
y(ti) t
2 4 6 −8 −6 −4 −2 2 4
t u(t)
◮ Sampling: Convert continuous-time signal to discrete-time
signal.
◮ Hold circuit: Convert discrete-time signal to continuous-time.
The controller operates in discrete time.
1 / 8 hans.rosth@it.uu.se Sampling