
ROBOTICS ROBOTICS 01PEEQW 01PEEQW 01PEEQW 01PEEQW Basilio Bona - PowerPoint PPT Presentation
ROBOTICS ROBOTICS 01PEEQW 01PEEQW 01PEEQW 01PEEQW Basilio Bona Basilio Bona DAUIN DAUIN Politecnico di Torino Politecnico di Torino Mobile & Service Robotics Mobile & Service Robotics Sensors for Robotics Sensors for
ROBOTICS ROBOTICS 01PEEQW 01PEEQW 01PEEQW 01PEEQW Basilio Bona Basilio Bona DAUIN DAUIN – – Politecnico di Torino Politecnico di Torino
Mobile & Service Robotics Mobile & Service Robotics Sensors for Robotics Sensors for Robotics – – 3 3
Laser sensors (laser scanners, laser range-finders)) They measure the distance from reflecting obstacles on a plane � Rays are transmitted and received coaxially � The target is illuminated by collimated rays � The receiver measures the time-of-flight (back and forth) � It is possible to change the rays direction (2D or 3D measurements) D ′ D ′ D D half mirror Transmitter L Receiver θ ′ ′ λ = + + = + + λ c f ( L D ) 2 D ( L D ) π 2 3 ROBOTICS 01PEEQW
Laser sensors λ mplitude Ampli θ 0 Transmitted Reflected Phase 4 ROBOTICS 01PEEQW
Laser sensors METHODS � Pulsed laser: direct measurement of time-of-flight: one shall be able to measure intervals in the picoseconds range � Beat frequency between a modulating wave and the reflected � Beat frequency between a modulating wave and the reflected wave � Phase delay � It is the easiest implementable method 5 ROBOTICS 01PEEQW
Laser sensors θ c ′ λ = = + = + λ ; D L 2 D L π f 2 speed of light = c frequency of the moduling wave = f total distance total distance ′ = ′ = D D MHz; m = λ = f 5 60 The confidence on distance estimation is inversely proportional to the square value of the received signal amplitude 6 ROBOTICS 01PEEQW
Laser sensors A typical image from a rotating mirror laser scanner. Segment lengths are proportional to the measurement uncertainty 7 ROBOTICS 01PEEQW
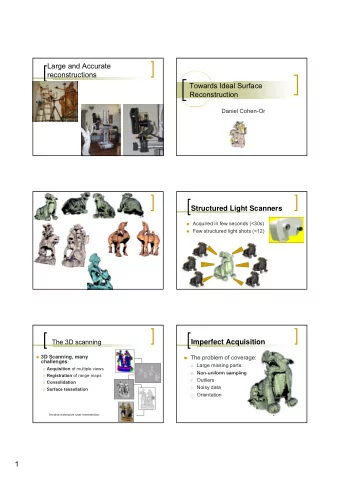
Laser scanners for accurate measurements 8 ROBOTICS 01PEEQW
LIDARS � LIDARs are laser scanners that rotate around an axis allowing to scan a 3D space region � The technology requires a precise synchronization between the laser scan process and the rotation around the axis for precise map creation 9 ROBOTICS 01PEEQW
Example: DRC 2013 These are the rotating scanners The CHIMP (CMU Highly Intelligent Mobile Platform) 10 ROBOTICS 01PEEQW
Triangulation Triangulation is the process of determining the location of an object by measuring angles from known points to the object at either end of a fixed known baseline The point can be chosen as the third point of a triangle with one known side and two known angles In practice: � Light sheets (or other patterns) are projected on the target � Reflected light is captured by a linear or 2D matrix light sensor � Simple trigonometric relations are used to compute the distance 11 ROBOTICS 01PEEQW
Triangulation d α β β baseline ℓ d d ℓ = + ⇒ = ℓ ; d α β tan tan 1 1 + α β tan tan 12 ROBOTICS 01PEEQW
Triangulation C α β γ sin sin sin = = BC AC AB γ = ⋅ α = ⋅ β RC AC sin BC sin ⋅ ⋅ α α ⋅ ⋅ β β AB sin sin = RC γ sin ⋅ α ⋅ β AB sin sin = RC α β α + β sin( ) R A B 13 ROBOTICS 01PEEQW
Triangulation D f Transmitter Transmitter L x L = D f x f 14 ROBOTICS 01PEEQW
Structured light (infrared or visible spectrum) 15 ROBOTICS 01PEEQW
Structured light � Monodimensional D α − f cot u case u f Du = x α α − f u cot Df = z α − f cot u 16 ROBOTICS 01PEEQW
Recommend


















More recommend
Explore More Topics
Stay informed with curated content and fresh updates.