Road to MeerKAT KAT-7 DBE Alan Langman
meerKAT
Overview • Objectives of meerKAT • Location Location Location • MeerKAT Engineering Specification • Prototypes to MeerKAT • KAT-7 • Mention Control Interface • Other research • Questions?
KAT/MeerKAT Objectives Build a world class radio telescope (up to 80 dishes) Choose a frequency range that is likely to have high science impact. Commission a 7 dish system from end of 2009, engineering risk mitigation and do some early science. Train a new generation of scientists and engineers who are capable to participate in large international projects, such as the SKA. Provide an excellent facility for local and international scientists. Implement mission-driven innovation to mobilise industry, academia and research fraternity. SKA pathfinder
SKA Bid - Remote site
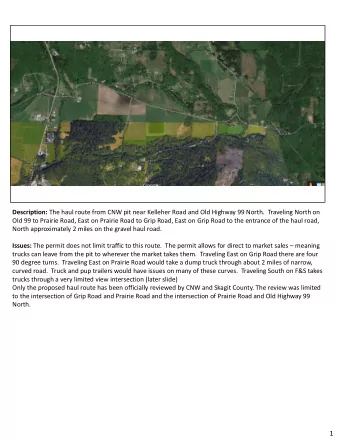
The SKA & KAT site
South African Radio Frequency Measurement Campaign
Radio Frequency Environment HartRAO
MeerKAT Specifications Parameter Minimum scenario Goal scenario Frequency range 0.5-2.5 GHz 0.5 - 3 GHz Expandable to include bands >8 GHz 200 m 2 /K 300 m 2 /K Ae/Tsys Feed & FoV Single-pixel wideband feed giving natural primary beam FoV Dish diameter 12 m Number of dishes 80 100 Tsys 30 K 25 K Array configuration 70% core array with 500m max. baseline. 30% extended array with 10km max. baseline. Instantaneous bandwidth 512 MHz 1024 MHz Number of channels 16 k 64 k Polarisation purity -25dB -25dB Dynamic Range 50 dB Phased array beams 5 > 5
MeerKAT DBE Functions • Imaging (continuum + spectral line) • Beamforming(continuum + spectral line) • Pulsar Timing • Transient Detection • Baseband recording • VLBI • (and more … scope is still under revision)
What is the KAT/MeerKAT? Dishes and Feeds: 80 x 12 m dishes, each equipped with a single pixel prime focus feed Key interfaces Optical RF links: 80 x 2 optical links (80 dishes, 2 polarisations) Digital Receiver Station Controller Front end station (Karoo) processor Station data: High speed, large data volume, long distance data transfer Karoo Station to off- Operations Centre Back end station site data processing facility. (Cape Town) processor Station data: Distribution internationally, typically over TCP/IP. User (Scientist) Internet access
The prototyping phases Same site in the Karoo – 2009 onwards MeerKAT roll-out & On the proposed SKA site in Karoo – 2008 commissioning onwards KAT-7 construction & commissioning Current – at HartRAO Experimental development model (XDM) Current – Phased Experimental Completed at SAAO Demonstrator (PED) 4x3x2 FPA
11 April 2007
First extra-galactic object recorded by XDM – 17/07/2007 Drift scan across Cygnus A
KAT-7 7
KAT-7 Specifications Parameter Spec Dish diameter 12 m Number of dishes 7 Tsys 30 K Frequency range 0.5-3 GHz Array configuration < 100 m Feed configuration Single pixel feed, prime focus Instantaneous 256 MHz bandwidth Number of channels 16 k
MeerKAT DBE Functions • Imaging (continuum + spectral line) • Beamforming(continuum + spectral line) • Pulsar Timing • Baseband recording • VLBI
KAT-7 Functional View Maintainer Radio Task signal sources Telescope displays Operator - Tied-array displays - Correlator displays Generate RF in signal displays Data capturing Task machine instruction set Operator Raw data Task Observer Modes : Raw data: definition Operator (a) Tied-array Raw data (a i) Dish baseband Task data Post- Task (b) Correlator (a ii) Tied-array baseband Maintainer processing products planning (a iii) Tied-array auto-correlation Observer tool (b) Visibilities Task Task parameters Contextual instruction set information Real-time (scan level) control Task types : Generate Single-dish tasks: system - Single-dish tipping curve health - Single-dish gain curve displays Task instruction set Task execution Single-dish/tied-array tasks: & resource Operator - Tied-array operator control System health management - Tied-array raw data capture state displays - Tied-array spectroscopy Maintainer - Tied-array pulsar monitoring Operator control - Tied-array pointing & gain measurement Task list (for manual tasks) Task execution Correlator tasks: control - Gain&phase stability - Correlator operator control Operator - Correlator raw data capture - Baseline calibration - Pointing calibration - Holography - Imaging
KAT-7 Physical Architecure System Engineering Diagram series SW – LAN Switch Weather Station Interface Unit n – (Antennas 1 to 7) Diagram 3f: Installation Interfaces: Telescope to Ancillaries/Infrastructure VOIP – Voice Over IP terminal 25 June 2008 TRF – Time & Frequency Reference C&M – Monitor & Control PC – Personal Computer FEED ASSEMBLY RF – Radio Frequency Installation Interfaces ANTENNA SERVICES CONTAINER Telescope Cabinet Ancillary Equipment Fire System Antenna Drives Intrusion Sensor /3 Trench Trench VOIP Point ICD-M-02 Telescope Cabinet Antenna Controller ICD-M-01 Fibre Network SW Fibre Network SW ICD-M-04 Patch Panel RF Stage 5 ICD-M-06 Power System Ancillary Equipment ICD-M-05 Fire System Heat Exchanger Intrusion Sensor VOIP Point Power System Cooling Splitter Cooling Plant CCTV Cooling Sensor SITE COMPLEX COMPUTING CONTAINER Telescope Cabinet Ancillary Equipment ICD-M-03 Cooling Plant Fire System Antenna Assembly (1 of 7) Intrusion Sensor C&M Network SW /3 Air Conditioner Compressor VOIP Point SITE COMPLEX CONTAINER ICD-M-14 Ancillary Cabinet ICD-M-13 DBE & RF Subsystem Network SW ICD-M-12 Long distance Fibre Data Network SW Power System Terminal Unit Carnavon Support Base ICD-M-11 BMS PC Key: Responsibilities CONTROL & MONITORING CONTAINER Operator Panel Ancillary Equipment Telescope Cabinet Ancillary Equipment Air Conditioner ICD-M-15 Fire System Compressor Telescope ICD-M-10 TBD Intrusion Sensor C&M Network SW /3 VOIP Point Telescope Accommodation Cape Town Support Base C&M PC ICD-M-08 Ancillaries POWER ROOM Transformers ICD-M-09 Ancillaries UPS/DC System Operator Panel Diesel Generator Power System Shed Power Monitor Infrastructure ICD-M-16 Fire Sensor ICD-M-07 Infrastructure
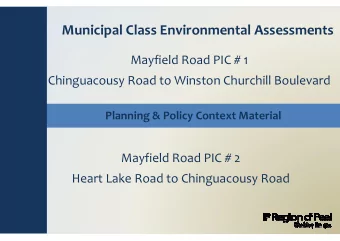
DBE Architecture for KAT-7
Mechanical
Roach
katADC Requirements • The katADC shall include an E2PROM to store configuration information. • The katADC shall operate from 50MHz to 1GHz (goal 1.5GHz). • The katADC shall sample data with more than 6.5 ENOB over the full operating frequency range. • The katADC shall have a 50 ohm termination on the input, switchable via a suitable RF switch. • The katADC shall have 30dB RF gain control • The katADC shall have an onboard PLL clock generator. • The katADC shall have RFI shielding.
katADC
Gateware/Firmware • 100% CASPER tools • Developed Board Support Package for ROACH • Integrated into toolchain • U-boot port on board • Ready for ROACH
Control / Monitoring • Control interface are lines of text – Similar to tinysh, but with two differences: • Syntax somewhat more formal, more amenable to machine parsing • Not only set and get commands – commands defined for application domain (eg: start a data capture) • In concept similar to a shell, but also SMTP, IMAP, POP, FTP
Implementation • Runs out of FPGA blockrams on PPC • Control protocol runs over serial port • Multiple simultaneous data products over network interfaces (100Mbit, 10Gbit): – Histograms (2 * 256 bins) – Radiometers (2 * integrated power value) – Spectrometer (1024 channels, IQUV integrated) – Raw (2 * 1024 complex values)
Datastream control • Create and destroy streams • Set up parameters for data products • Start and stop data streams • Data transfer – High speed data products emitted autonomously by gateware over 10Gbit – Lower bandwidth data products transferred by processor via 100Mbit interface
Example Command • Broadcast histogram data for 15 seconds: • ?capture-create stream1 • ?capture-source stream1 hist • ?capture-destination stream1 xdp1:192.168.20.255:7002 • ?channel-dump-rate stream1 4 • ?capture-start stream1 1194508376 • ?capture-stop stream1 1194508391 • ?capture-destroy stream1
Other control and monitoring • Set time • Configure network interfaces • Dump and restore settings to survive reprogramming • Report log events • ...
hiBOB (M. Aitken)
hubbleADC (J. Salkinder)
www.ska.ac.za www.kat.ac.za www.hartrao.ac.za
Recommend
More recommend
Unleash a World of Digital Possibilities—Browse, Share, and Explore Content Without Boundaries