Reconstructing thin shapes by a level set technique presented by: - PowerPoint PPT Presentation
UNIVERSITY OF MANCHESTER School of Mathematics Reconstructing thin shapes by a level set technique presented by: Oliver Dorn joint with: D. Alvarez, N. Irishina, M. Moscoso Universidad Carlos III de Madrid Minisymposium on New
UNIVERSITY OF MANCHESTER School of Mathematics Reconstructing thin shapes by a level set technique presented by: Oliver Dorn joint with: D. Alvarez, N. Irishina, M. Moscoso Universidad Carlos III de Madrid Minisymposium on ’New Developments in Geometric Inverse Problems (1)’ Conference AIP 2009, Vienna, July 20-24, 2009.
OUTLINE New application for level sets: crack detection Classical shape evolution Representing thin shapes by two level set functions Deforming thin shapes with level sets The numerical algorithm Numerical experiments Summary and future work Joint work with Diego ´ Alvarez and Miguel Moscoso, UC3M. I
CLASSICAL SHAPE EVOLUTION level set function f=f(S) z y F(S) shape S shape S x F(S) F(S) plane z=0 II
CLASSICAL SHAPE EVOLUTION level set function f(S+ δ S) = f(S)+ δ f (F(S)) z y shape S + δ S x S+ δ S plane z=0 III
CLASSICAL SHAPE EVOLUTION source domain Ω shape S +δ S F(S) F(S)=F(u(S),z(S)) receiver receiver IV
CLASSICAL SHAPE EVOLUTION Level set approach: In order to evolve the level set function f such that the zero level set follows the flow F , we need to numerically solve the following Hamilton-Jacobi type equation (Osher and Sethian, 1988): ∂f ∂t + F |∇ f | = 0 . V
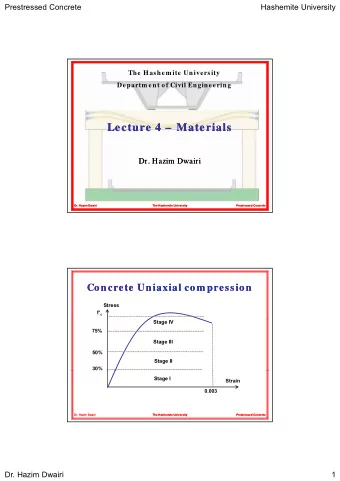
CRACK-TYPE STRUCTURES Real 5 10 15 20 25 30 35 40 45 50 5 10 15 20 25 30 35 40 45 50 VI
PROBLEMS OF CLASSICAL LEVEL SET TECHNIQUES Classical level set techniques describe ’volumetric’ shapes Cracks are ’thin’ shapes, ideally without volume Cracks are not ’closed’ Cracks might be ’broken’, consisting of several pieces ’Crack evolution’: Propagating cracks vs. changing topology of cracks Idea: use two level set functions for describing cracks (thin shapes)! VII
First level set function ϕ ϕ n(x) Γ ϕ Ω VIII
Second level set function ψ ψ Γϕ ������������� ������������� ������������� ������������� B S ������������� ������������� ������������� ������������� Ω IX
THE PHYSICAL PROBLEM The electric potential u j satisfies ∇ · b ( x ) ∇ u j = 0 in Ω , (1) and the boundary condition u j = γ j on ∂ Ω . (2) The corresponding physical measurements are A j ( b ) = g j = ∂u j ∂n ( d l ) (3) taken at positions d l ∈ ∂ Ω for l = 1 , . . . , l . Residual operator R j ( b ) = A j ( b ) − ˜ (4) g j . X
CLASSICAL GRADIENT DIRECTION Least squares cost functional: J j ( b ) = 1 2 �R j ( b ) � 2 (5) Z Classical gradient direction grad b J j ( x ) = R ′ j ( b ) ∗ R j ( b ) (6) Adjoint formulation: grad b J j ( x ) = ∇ u j · ∇ z j , (7) Adjoint equation: u j solves (1)-(2) and z j solves the following adjoint equation ∇ · b ∇ z j = 0 in Ω , (8) bz j = R j ( b ) on ∂ Ω . (9) XI
REPRESENTING THIN SHAPES (CRACKS) b e Γ ε 1 b i D Γ 2 b e exterior 2 \ D D R thin region ε exterior 2 \ D n R XII
REPRESENTING THIN SHAPES (CRACKS) First level set function ϕ ( x, y ) : R 2 : ϕ ( x, y ) ≤ 0 } , Ω 1 = { ( x, y ) ∈ I (10) R 2 : ϕ ( x, y ) = 0 } . Γ 1 = { ( x, y ) ∈ I (11) Γ 1 is the zero level set. The outward normal n to Γ 1 is ∇ ϕ ( x ) n ( x ) = on Γ 1 . (12) |∇ ϕ ( x ) | Thin region D of width � > 0 : R 2 : D = Ω 1 ∩ { y ∈ I there exist x ∈ Γ 1 such that y = x − α n ( x ) , for some 0 ≤ α ≤ � } . (13) XIII
REPRESENTING THIN SHAPES (CRACKS) B B ϕ>0 Γ 1 S S ϕ=0 D ϕ<0 Γ 2 ψ>0 ψ>0 ψ<0 ψ>0 ψ<0 y x XIV
REPRESENTING THIN SHAPES (CRACKS) Second level set function ψ ( x ) defines pieces of the crack: R 2 : ψ ( x, y ) < 0 } . B = { ( x, y ) ∈ I (14) The thin shapes S are given as S = ( D ∩ B ) ∩ Ω . (15) The conductivity distribution in Ω is given as for x ∈ S [ ϕ, ψ ] , b i b ( x ) = (16) for x ∈ Ω \ S [ ϕ, ψ ] . b e XV
SHAPE EVOLUTION (CRACKS) Γ 1 ’ Γ 2 ’ Γ 1 (x) Γ 2 ζ b = b x (x) ζ e x 1 = x− ε n(x) b = b i b = b e D ε D’ XVI
Propagating the first level set function S+ ζ + S+ ζ − b −>b i e b −>b e i + S − S δ ϕ J j ≈ � S + ( b i − b e )grad b J j ( x ) ζ ( x ) n ( x ) ds ( x ) − (17) � S − ( b i − b e )grad b J j ( x ) ζ ( x ) n ( x ) ds ( x ) . XVII
Propagating the first level set function Descent direction for first level set function: � � F ϕ ( x ) = − ( b i − b e ) grad b J j ( x ) − grad b J j ( x − � n ( x )) χ B ( x ) with x = ( x, y ) . Hamilton-Jacobi type formulation of shape evolution: ∂ϕ ∂t + F ϕ |∇ ϕ | = 0 (18) XVIII
Propagating the second level set function (example) B B ϕ>0 Γ 1 S S ϕ=0 D ϕ<0 Γ 2 ψ>0 ψ>0 ψ<0 ψ>0 ψ<0 y x XIX
Propagating the second level set function (example) Descent direction for second level set function: � grad b J j ( x ) δ Γ B ( x ) χ D ( x ) dy F ψ ( x ) = − ( b i − b e ) with x = ( x, y ) . Hamilton-Jacobi type formulation of shape evolution: ∂ψ ∂t + F ψ |∇ ψ | = 0 (19) XX
SHAPE EVOLUTION (CRACKS) Iteration rule for ϕ ( n ) (moving the cracks): ϕ ( n +1) = ϕ ( n ) + τ ϕ F ( n ) |∇ ϕ ( n ) | (20) ϕ ϕ (0) = ϕ 0 . (21) Iteration rule for ψ ( n ) (breaking and merging cracks, changing lengths): ψ ( n +1) = ψ ( n ) + τ ψ F ( n ) |∇ ψ ( n ) | , (22) ψ ψ (0) = ψ 0 . (23) XXI
Step n of the numerical algorithm 1. For each source γ j , we calculate the residuals ζ j = g ( n ) g j for the electrical conductivity b ( n ) ( x ) . − � j 2. We solve the forward and adjoint problem and calculate R ′ j ( b ) ∗ R j ( b ) = ∇ u j · ∇ z j . 3. We calculate F ϕ ( x ) and F ψ ( x ) as described before. 4. We choose appropriate extension velocities and apply some additional regularization. 5. We correct the level set functions ϕ ( n ) and ψ ( n ) according to the above derived iteration rules. The step-sizes are chosen empirically prior to starting the algorithm. 6. We determine the new parameter function b ( n +1) ( x ) . XXII
Numerical examples 20 20 20 40 40 40 60 60 60 80 80 80 100 100 100 20 40 60 80 100 20 40 60 80 100 20 40 60 80 100 20 20 20 40 40 40 60 60 60 80 80 80 100 100 100 20 40 60 80 100 20 40 60 80 100 20 40 60 80 100 0.06 20 50 0.04 40 100 60 0.02 150 80 100 200 0 20 40 60 80 100 50 100 150 200 0 5 10 15 Figura 1: First numerical experiment: reconstruction of a single crack. Top row (from left to right): Initial profile, profile after 10 source activations, and profile after 20 source activations. Center row (from left to right): profiles after 144 , 252 and 324 source activations. Bottom row (from left to right): Reconstructed profile (after 540 source activations), true profile, and evolution of the cumulative cost J loop versus number of loops. XXIII
Numerical examples 0.5 1 0 0.5 −0.5 0 −1 −0.5 1 1 1 1 0.5 0.5 0.5 0.5 0 0 0 0 0.5 5 0 0 −0.5 −5 −1 −10 1 1 1 1 0.5 0.5 0.5 0.5 0 0 0 0 Figura 2: Initial and final level set function for the reconstruction of a single crack. Initial on top row: ϕ (0) (x) and ψ (0) (x) . Final on bottom row: ϕ ( f ) (x) and ψ ( f ) (x) XXIV
Numerical examples 20 20 20 40 40 40 60 60 60 80 80 80 100 100 100 20 40 60 80 100 20 40 60 80 100 20 40 60 80 100 20 20 20 40 40 40 60 60 60 80 80 80 100 100 100 20 40 60 80 100 20 40 60 80 100 20 40 60 80 100 0.2 20 50 0.15 40 100 0.1 60 150 0.05 80 100 200 0 20 40 60 80 100 50 100 150 200 0 10 20 30 Figura 3: Second numerical experiment: reconstruction of three cracks. On the two first rows from left to right: initial guess, and recons- truction after 10,40,252,360,504 iterations. On the third row from left to right: final reconstruction (900 iteration), real crack and evolution of J loop versus the number of loops. XXV
Numerical examples 2 5 0 0 −5 −2 −10 1 1 1 1 0.5 0.5 0.5 0.5 0 0 0 0 1 1 .5 .5 0 0 0 .5 1 0 .5 1 Figura 4: Final level set function, in the case of reconstructing three cracks. Left column: surface and contour plot of sign of ϕ (x) . Right column: surface and contour plot of sign of ψ (x) XXVI
Numerical examples 20 20 20 40 40 40 60 60 60 80 80 80 100 100 100 20 40 60 80 100 20 40 60 80 100 20 40 60 80 100 20 20 20 40 40 40 60 60 60 80 80 80 100 100 100 20 40 60 80 100 20 40 60 80 100 20 40 60 80 100 0.2 20 50 0.15 40 100 0.1 60 150 0.05 80 100 200 0 20 40 60 80 100 50 100 150 200 0 5 10 15 Figura 5: Thrid numerical experiment: Reconstructing a closed curve. On the two first rows from left to right: initial guess, reconstruction after 10,30,40,80,160 iterations. On the third row from left to right: final reconstruction (360 iteration), real crack and evolution of J loop versus the number of loops. XXVII
Recommend




More recommend
Explore More Topics
Stay informed with curated content and fresh updates.