R 0 R 1 R 2 . . . Non parametric version: empirical null space - PowerPoint PPT Presentation
Modal filtering data reduction Introduction and subspace detection Usefulness of global vibration-based SHM methods for handling the temperature effect in SHM Limitations due to temperature effects on the dynamics of civil engineering
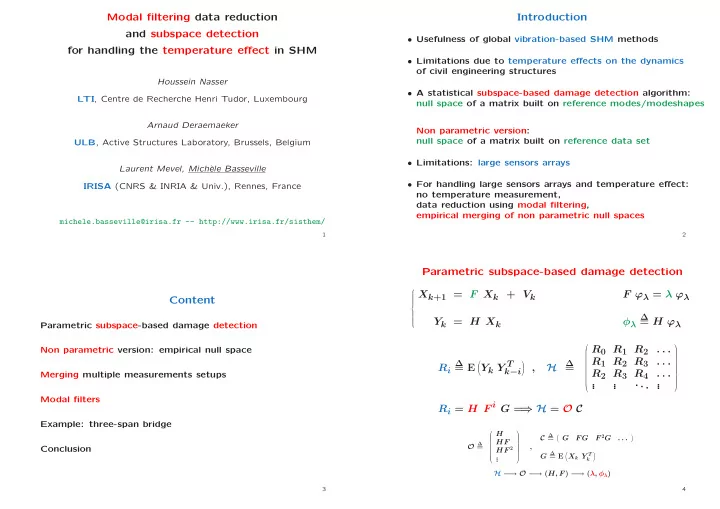
Modal filtering data reduction Introduction and subspace detection • Usefulness of global vibration-based SHM methods for handling the temperature effect in SHM • Limitations due to temperature effects on the dynamics of civil engineering structures Houssein Nasser • A statistical subspace-based damage detection algorithm: LTI , Centre de Recherche Henri Tudor, Luxembourg null space of a matrix built on reference modes/modeshapes Arnaud Deraemaeker Non parametric version: null space of a matrix built on reference data set ULB , Active Structures Laboratory, Brussels, Belgium • Limitations: large sensors arrays Laurent Mevel, Mich` ele Basseville • For handling large sensors arrays and temperature effect: IRISA (CNRS & INRIA & Univ.), Rennes, France no temperature measurement, data reduction using modal filtering, empirical merging of non parametric null spaces michele.basseville@irisa.fr -- http://www.irisa.fr/sisthem/ 1 2 Parametric subspace-based damage detection X k +1 = F X k + V k F ϕ λ = λ ϕ λ Content ∆ Y k = H X k φ λ = H ϕ λ Parametric subspace-based damage detection R 0 R 1 R 2 . . . Non parametric version: empirical null space R 1 R 2 R 3 . . . ∆ Y k Y T ∆ , R i = E = H k − i R 2 R 3 R 4 . . . Merging multiple measurements setups . . ... . . . . . . . Modal filters R i = H F i G = ⇒ H = O C Example: three-span bridge � G H C ∆ F 2 G = F G . . . � HF O ∆ = , Conclusion HF 2 G ∆ � � X k Y T . = E . . k H − → O − → ( H, F ) − → ( λ, φ λ ) 3 4
Λ modes θ ∆ Non parametric version: empirical null space Canonical parameter : = vec Φ mode shapes Φ Φ∆ Reference data set for safe structure Observability in modal basis : O p +1 ( θ ) = . . . Φ∆ p H (0) = 0 Left null space: ˆ S T 0 ˆ S 0 T ˆ ˆ S 0 = I s , θ 0 : reference parameter for safe structure Left null space: S T S = I s , S T O p +1 ( θ 0 ) = 0 Y k : N -size sample of new measurements Y k : N -size sample of new measurements Residual for SHM: Residual for SHM: ∆ S 0 T = vec( ˆ ˆ ζ N H ) = vec( S T ( θ 0 ) ˆ ζ N ( θ 0 ) ∆ H ) Σ : covariance of ζ J ( θ 0 ) : sensitivity of residual ζ w.r.t. modal changes χ 2 -test: ζ T N Σ − 1 ζ N ≥ h Non param. subspace detection N Σ − 1 J ( J T Σ − 1 J ) − 1 J T Σ − 1 ζ N ≥ h χ 2 -test: ζ T 5 6 Merging multiple data sets at different temperatures Data reduction using modal filtering sensor array H (0) j =1 H (0) ,j ∆ � J linear combiner J reference data sets : = 1 /J p +1 ,q p +1 ,q y 1 ë 1 ++ y) S 0 T H (0) y 2 z( structure ë 2 Global empirical null space: p +1 ,q = 0 � � � � � � + . . . y n Y k : N -size sample of new measurements ë f s n s Residual for SHM: z l orthogonal to the N modes in a frequency band of interest except mode l . More sensors than modes. ∆ S 0 T ˆ ζ N = vec H Φ T α = I ; Φ T rank deficient − → SVD Σ : covariance of ζ Z = α Y , dim( Z ) < dim( Y ) N Σ − 1 ζ N ≥ h χ 2 -test: ζ T Robust subspace detection Non parametric & robust subspace detection on Z . 7 8
Example - Simulated three-span bridge Non parametric subspace detection • A simulator provided by ULB Two materials: steel and concrete Contrast of non−parametric test Contrast of non−parametric test Excitation: uniform pressure on the first span Contrast − level d 4 Contrast − level d 4 2 2 10 10 Contrast − level d 3 Contrast − level d 3 Motion restricted to in-plane vibrations Contrast − level d 2 Contrast − level d 2 Contrast − level d 1 Contrast − level d 1 1 1 10 10 • Both hand sides subject to different temperature gradients Contrast Contrast 0 0 • Four damage scenarios: stiffness reduction at three locations 10 10 T=-15 to 45°C −1 −1 10 10 −10 0 10 20 30 40 −10 0 10 20 30 40 T=-15 to 0°C ° C ° C Temperature Temperature Contrast between the undamaged and the four damage levels. Uniform pressure Concrete Concrete DL2 DL3 Using 29 sensors (left). Using 10 filters (right). Damage DL1 Damage Damage 9 10 Conclusion Robust subspace detection Temperature effect & large sensors arrays in vibration-based SHM Contrast of robust subspace detection Contrast of robust subspace detection 9 4 10 10 Contrast − level d 4 Contrast − level d 4 Statistical non parametric approach Contrast − level d 3 Contrast − level d 3 Contrast − level d 2 Contrast − level d 2 Contrast − level d 1 Contrast − level d 1 8 3 10 10 Statistical subspace-based damage detection algorithm Contrast Contrast 7 2 Empirical null space merging data at # temperatures 10 10 Modal filters for data reduction 6 1 10 10 −10 0 10 20 30 40 −10 0 10 20 30 40 ° C ° C Temperature Temperature Example: simulated three span bridge Contrast between the undamaged and the four damage levels. Ongoing: sensor noise effect Using 29 sensors (left). Using 10 filters (right). Future: in-operation examples, comparison with other methods 11 12
Recommend






More recommend
Explore More Topics
Stay informed with curated content and fresh updates.