Quickest detection & classification of transient stability - PowerPoint PPT Presentation
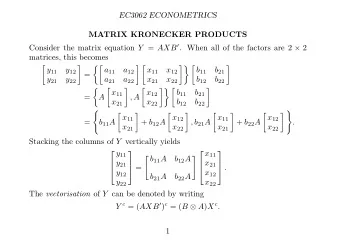
Quickest detection & classification of transient stability status for power systems Jhonny Gonzalez Joint work with: c , Panagiotis Papadopoulos , Goran Peskir , & John Moriarty Jovica Milanovi The University of
Quickest detection & classification of transient stability status for power systems Jhonny Gonzalez ∗ Joint work with: c ∗ , Panagiotis Papadopoulos ∗ , Goran Peskir ∗ , & John Moriarty ‡ Jovica Milanovi´ ∗ The University of Manchester ‡ Queen Mary University of London Workshop on Mathematics of Energy Management, 14 June 2016 University of Leeds, UK
Introduction A transient disturbance could occur e.g. if there is a momentary tree contact with transmission lines, a lightning strike or lines touch each other e.g. due to high speed wind.
Effect of faults on generator rotor angles 100 80 60 Rotor angle (degrees) 40 20 0 Rotor angle of generator θ -20 0 50 100 150 Time (cycles) Generators’ rotor angles must be in equilibrium. When disturbance occurs at time θ , rotor angles oscillate possibly leading to system instability.
Effect of faults on generator rotor angles 100 80 60 Rotor angle (degrees) 40 20 0 Rotor angle of generator τ 1 θ -20 0 50 100 150 Time (cycles) Disturbance must be detected quickly, say, at time τ 1 . θ disturbance is predicted time τ 2 .
Effect of faults on generator rotor angles 100 80 60 Rotor angle (degrees) 40 20 0 Rotor angle of generator τ 1 τ 2 θ -20 0 50 100 150 Time (cycles) Severity of disturbance must be predicted (say at time τ 2 ) before it is ‘too late’. This allows to apply effective action promptly.
Quickest detection and classification problem Assume disturbance occurs at random time θ ; and that disturbances are either stable or unstable of I different classes. Problem: Based on observation of the generator rotor angles δ , choose decision times τ 1 ≤ τ 2 and a disturbance class d in order to minimise � ( τ 1 − θ ) + + τ 2 − τ 1 � E , the average total delay in detecting the disturbance and predicting its class d , subject to the risk constraints False alarm: dist. has not occurred yet P [ τ 1 < θ ] ≤ p 0 , Error A 1 : dist. wrongly predicted stable P [ A 1 ] ≤ p 1 , Error A 2 : dist. wrongly predicted unstable P [ A 2 ] ≤ p 2 , Error A 3 : wrong unstable class P [ A 3 ] ≤ p 3 . We decouple the problem: First choose τ 1 , then choose τ 2 and d .
Associated processes ρ and π We can construct two stochastic processes ρ and π associated with the rotor angles process δ : ◮ ρ t = ( ρ 0 t , ρ 1 t ) , π t = ( π 0 t , . . . , π I t ) . 1 ◮ For each t , ρ t and π t are probability vectors. Interpretation ◮ ρ 0 t a posteriori probability that the disturbance has occurred by time t , ◮ π 0 t a posteriori probability that the disturbance is stable at time t . Probabilistic Neural Networks (PNN) are used to construct ρ and π in a supervised training process. ◮ Input data is compared with training data. ◮ PNN outputs a vector indicating the probability that the input belongs to each training class. 1 I + 1 is the number of disturbance classes.
Optimal decision rule 1 t → u(t) High probability that contingency has occurred π 0 (t) ≥ u(t) A Contingency is predicted stable t → π 0 (t) t → ρ 0 (t) l(t) ≤ π 0 (t) ≤ u(t) Continue observing π 0 (t) t → l(t) 0 * + T τ 1 * τ 2 * τ 1 Time Figure : Illustration of the optimal decision rule. Task: Find optimal values of boundaries A , u ( t ) and ℓ ( t ) . See [1], [2] for details.
Case study ◮ We consider a power system with 15 generators. ◮ 5971 contingencies were generated: 2000 for training PNN, 2000 for constructing boundaries and 1971 for testing. ◮ Rotor angles recorded every 1 / 60s = 1 cycle for 1 . 5s (91 cycles). ◮ Entire dataset contains 15 disturbance classes. ◮ Allowable error rates p 0 = 5 / 2000, p 1 = 6 / 220, p 2 = 6 / 1780, p 3 = 21 / 220. Resulting optimal boundaries were applied to each contingency on testing dataset, recording detection time τ ∗ 1 , prediction time τ ∗ 2 and predicted disturbance class d ∗ .
Distribution of τ ∗ 1 − θ and τ 2 − τ ∗ 1 on testing dataset Distribution of τ 1 * - θ Distribution of τ 2 - τ 1 * 0.1 0.25 0.09 0.08 0.2 0.07 Relative frequency Relative frequency 0.06 0.15 0.05 0.04 0.1 0.03 0.02 0.05 0.01 0 0 -1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 0 10 20 30 40 50 60 70 Time (cycles) Time (cycles) Figure : Distribution of τ ∗ 1 − θ (left) and τ 2 − τ ∗ 1 (right) on the testing dataset. ◮ Average detection delay: 8.86 cycles (0 . 147 s ), with 3/1971 false alarm rate. ◮ Average prediction time after detection: 16.56 cycles (0 . 28 s ), with error rates A 1 : 5 / 197 , A 2 : 0 / 1774 and A 3 : 14 / 197. ◮ All risk constraints are satisfied.
Alternative approach An alternative detection algorithm was implemented based on monitoring changes on statistical properties of rotor angles over time. Algorithm is quite easy to implement, yet very accurate. We got an average detection delay of 7.7 cycles (0.128s) with 9 / 1971 ≥ p 0 false alarm rate. Our approach is 1.14x slower but has 3x better error rate on test dataset. We also employed a fixed prediction time strategy for classifying disturbances as in [3]. In this case the disturbance class is always predicted at, say, t cycles after the disturbance has been detected.
Error rates A 1 , A 2 and A 3 on testing dataset 20 Overall error rate, fixed times A1, fixed times 15 Overall error rate, optimal A1, optimal % 10 5 2.54 0 0 10 16.56 20 30 40 50 60 Time (cycles) 12 A2, fixed times 10 A3, fixed times A2, optimal A3, optimal 8 7.12 % 6 4 2 0 0 10 16.56 20 30 40 50 60 Time (cycles) Figure : Error rates with fixed prediction times and our approach (filled circles). Our approach produces acceptable overall error rates 3x faster than fixed prediction times strategy.
Conclusions ◮ A new technique to asses the transient stability status of power systems has been proposed. ◮ It detects disturbances as quickly as possible on average while limiting false alarm rates. ◮ It allows flexibility in prediction times: severity of disturbances is predicted quickly if data is informative, otherwise prediction is delayed until sufficient information is gathered. ◮ Hence it classifies disturbances faster than the fixed prediction time strategy, yet satisfying limits on the frequency of prediction errors.
References J. Gonzalez, Y. Kitapbayev, T. Guo, J.V. Milanovic, G. Peskir, and J. Moriarty. Application of sequential testing problem to online detection of transient stability status for power systems. In Submmitted , 2016. J. Gonzalez, J.V. Milanovic, P. Papadopoulos, G. Peskir, and J. Moriarty. Quickest detection and classification of transient stability status for power systems. Working paper , 2016. T. Guo and J.V. Milanovic. Online Identification of Power System Dynamic Signature Using PMU Measurements and Data Mining. IEEE Transactions on Power Systems , PP(99):1–9, 2015.
Recommend









More recommend
Explore More Topics
Stay informed with curated content and fresh updates.