Optimum Filter Applications Introduction Rc o = d Inverse filtering - PowerPoint PPT Presentation
Optimum Filter Applications Introduction Rc o = d Inverse filtering You now know the basic model for linear estimation Deconvolution Can estimate a random variable y ( n ) using a linear combination of Matched filters other
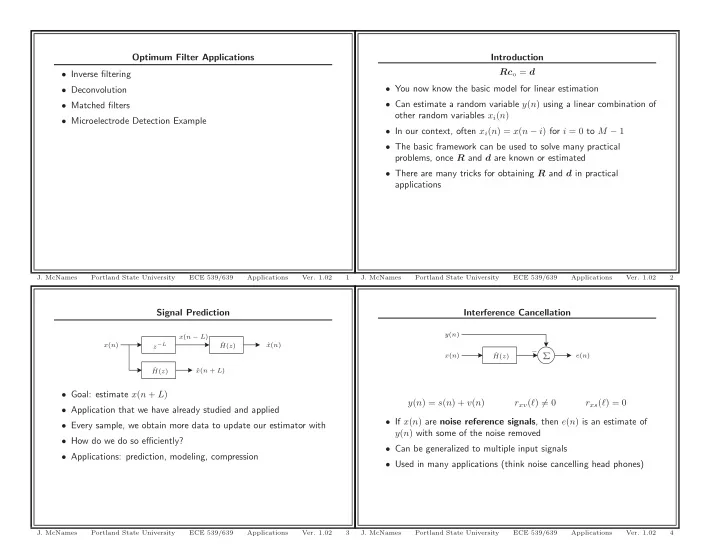
Optimum Filter Applications Introduction Rc o = d • Inverse filtering • You now know the basic model for linear estimation • Deconvolution • Can estimate a random variable y ( n ) using a linear combination of • Matched filters other random variables x i ( n ) • Microelectrode Detection Example • In our context, often x i ( n ) = x ( n − i ) for i = 0 to M − 1 • The basic framework can be used to solve many practical problems, once R and d are known or estimated • There are many tricks for obtaining R and d in practical applications J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 1 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 2 Signal Prediction Interference Cancellation y ( n ) x ( n − L ) ˆ x ( n ) z − L x ( n ) ˆ H ( z ) − ˆ x ( n ) � e ( n ) H ( z ) ˆ x ( n + L ) ˆ H ( z ) • Goal: estimate x ( n + L ) y ( n ) = s ( n ) + v ( n ) r xv ( ℓ ) � = 0 r xs ( ℓ ) = 0 • Application that we have already studied and applied • If x ( n ) are noise reference signals , then e ( n ) is an estimate of • Every sample, we obtain more data to update our estimator with y ( n ) with some of the noise removed • How do we do so efficiently? • Can be generalized to multiple input signals • Applications: prediction, modeling, compression • Used in many applications (think noise cancelling head phones) J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 3 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 4
System Identification System Inversion v ( n ) v ( n ) x ( n ) x ( n ) H ( z ) � y ( n ) H − 1 ( z ) ˆ y ( n ) H ( z ) � ˆ y ( n ) ˆ y ( n ) ˆ H ( z ) • Know as inverse system modeling , inverse filtering , • Know as system modeling deconvolution • If we can stimulate the system under normal operating conditions, • Goal: estimate an inverse of the system we can estimate r x ( ℓ ) and r yx ( ℓ ) • Useful for adaptive equalization, deconvolution, and adaptive • In this case ˆ H ( z ) could be an PZ system, since both the input inverse control and the output are observable • Still requires r x ( ℓ ) and r yx ( ℓ ) • What good is ˆ H ( z ) ? • Applications include echo cancelation, channel modeling, and system identification J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 5 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 6 Blind Deconvolution Optimum Inverse Modeling x ( n ) v ( n ) w ( n ) G ( z ) H ( z ) y ( n ) x ( n ) y ( n ) G ( z ) � H ( z ) y ( n ) ˆ • In this case the input is unknown as well as the system G ( z ) • Goal is to estimate the (possibly delayed and scaled) input w ( n ) • Ideally we would like to obtain y ( n ) from x ( n ) and possibly the system • May be difficult if h ( n ) ∗ g ( n ) ∗ w ( n ) ≈ b 0 w ( n − n 0 ) – G ( z ) contains a delay h ( n ) ∗ g ( n ) ≈ b 0 δ ( n − n 0 ) – The additive noise is significant • Problem is ill-defined if we have no information about w ( n ) – G ( z ) is nonminimum phase – The inverse system is IIR • Need to know something about • In practice, H ( z ) is an FIR filter r xy ( ℓ ) = r xw ( ℓ ) = g ( ℓ ) ∗ r w ( ℓ ) • In some applications a delayed estimate is acceptable, • Often assume w ( n ) is a WN(0 , σ 2 w ) process y ( n ) = ≈ y ( n − D ) ˆ J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 7 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 8
Remaining Tasks Matched Filters: Problem Definition M × 1 ( n ) = s ( n ) + v ( n ) x • Add an example with a synthetic signal and known system much like Example 6.7.1 in the text where s ( n ) is the signal of interest and v ( n ) is a noise signal • Add a practical example • Suppose we have “brief” events of interest that occur in a noisy background • Goal: detect the events • Applications: radar, sonar, microelectrode recordings, communications • Suppose we decide to form a linear combination, y ( n ) = c H x ( n ) and then apply a threshold for detection • Generally it is assumed that R s i ( ℓ ) = σ 2 R v j ( ℓ ) = σ 2 s i δ ( ℓ ) ∀ i v j δ ( ℓ ) ∀ j R s i v j ( ℓ ) = 0 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 9 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 10 Matched Filters: Estimator Properties Matched Filters: Detection Metrics Events Non-events y ( n ) = c H x ( n ) = c H s ( n ) + c H v ( n ) Detected TP FP N D � | y ( n ) | 2 � � c H x ( n ) x H ( n ) c � = c H R x ( n ) c P y ( n ) = E = E Not detected FN TN N ¯ D N E N ¯ E • The output power depends only on the signal autocorrelation matrix TP TP • Sensitivity : N E = TP+FN – Fraction of events that are detected • Because s ( n ) ⊥ v ( n ) , R x ( n ) can be expressed as TN TN • Specificity : E = x ( n ) x H ( n ) � � R x ( n ) = E N ¯ FP+TN – Fraction of non-events that are not detected � ( s ( n ) + v ( n )) ( s ( n ) + v ( n )) H � = E TP TP • Positive Predictivity : N D = TP+FP s ( n ) s H ( n ) v ( n ) v H ( n ) � � � � = E + E – Fraction of detected events that are events = R s ( n ) + R v ( n ) TN TN • Negative Predictivity : D = N ¯ FN+TN Signal Power Noise Power – Fraction of nondetected events that are not events • The structure of R s ( n ) depends on the statistical model of s ( n ) J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 11 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 12
Matched Filters: Metric Selection Matched Filters: Signal-to-Noise Ratio • Goal: maximize the detection accuracy y ( n ) = c H x ( n ) = c H s ( n ) c H v ( n ) – Minimize the number of false positives and false negatives P y ( n ) = c H R x ( n ) c = c H R s ( n ) c + c H R v ( n ) c – Maximize the sensitivity and specificity – Maximize the positive predictivity and negative predictivity • Proxy goal: Find c such that the signal-to-noise ratio is maximized • There is almost always a tradeoff between each of these pairs SNR = c H R s ( n ) c • Threshold controls the tradeoff c H R v ( n ) c • For a given tradeoff, what is the best parameter vector c ? • Rationale: detection will be easier if • Relationship is difficult to obtain in general – y ( n ) is large when signal is present – y ( n ) is small when only noise is present J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 13 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 14 Matched Filters: Problem Classes Matched Filters: Deterministic Signal in White Noise x ( n ) = s ( n ) + v ( n ) s ( n ) = α s 0 • The signal may be | c H α s 0 | 2 � = P α | c H s 0 | 2 � P s ( n ) = E – Random with autocorrelation matrix R s ( n ) | c H s 0 | 2 – Deterministic with random amplitude, s ( n ) = α s 0 SNR( c ) = P α c H R v c • Similarly, the noise may be colored or white Now if R v ( n ) = σ 2 v I • Four problems altogether | c H s 0 | 2 SNR( c ) = P α • Consider one at a time c H c P v From the Cauchy-Schwartz inequality � c H s 0 ≤ ( c H c )( s H 0 s 0 ) | c H s 0 | 2 ( c H c )( s H SNR( c ) = P α ≤ P α 0 s 0 ) = P α s H 0 s 0 c H c c H c P v P v P v J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 15 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 16
Matched Filters: Deterministic Signal in White Noise Matched Filters: Deterministic Signal in Colored Noise If the noise covariance matrix R v ( n ) is positive definite, then there SNR o ( c ) = P α s H c o = β s 0 0 s 0 exists a square root such that P v R v = L v L H • The SNR is maximized when c is the same as the expected event v shape • The text assumes that L v is a lower-upper Cholesky • This is why it is called a matched filter decomposition, but it could be any square root of R v ( n ) for this application • SNR is scale invariant SNR( c ) = SNR( β c ) • Here I am assuming the signal and noise are jointly stationary to simplify notation, but it works in the nonstationary case as well J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 17 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 18 Matched Filters: Whitening Matched Filters: Colored Noise SNR Let us define | c H s 0 | 2 | c H L v L − 1 v s 0 | 2 SNR( c ) = P α = P α v ( n ) � L − 1 c H R v c c H L v L H v c ˜ v v ( n ) | ( L H v c ) H ( L − 1 v s 0 ) | 2 c H ˜ s 0 ) | 2 | ˜ ( L − 1 v v ( n ))( L − 1 v v ( n )) H � � R ˜ v = E = P α = P α ( L H v c ) H ( L H c H ˜ v c ) ˜ c L − 1 v v ( n ) v H ( n ) L − H � � = E v where = L − 1 v ( n ) v H ( n ) L − H � � v E v c � L H s 0 � L − 1 ˜ ˜ v c v s 0 = L − 1 v R v L − H ( n ) v = L − 1 v L v L H v L − H ( n ) Thus, this reduces to the same problem as the white noise case and v the solution follows immediately = I c o = β L − H L − 1 v s 0 = β R − 1 c o = β ˜ ˜ s 0 v s 0 v SNR o ( c ) = P α SNR o ( c ) = P α s H s H 0 R − 1 ˜ 0 ˜ s 0 v s 0 P v P v J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 19 J. McNames Portland State University ECE 539/639 Applications Ver. 1.02 20
Recommend











More recommend
Explore More Topics
Stay informed with curated content and fresh updates.